基于RSSI参数纠正的无线传感器网络应急救灾系统
2012-09-07凡高娟侯彦娥王汝传
凡高娟, 侯彦娥, 王汝传
(1.河南大学计算机与信息工程学院,河南开封475004;2.江苏省无线传感网高技术研究重点实验室,江苏南京210003)
0 引言
2008年的冰雪灾害和汶川大地震两件突发事件给我国的经济、交通、人民的生产、生活等方面造成了重大不利影响.突发事件造成基于有线网络的基础通信设施中断,形成“信息孤岛”,对救援和基础通信设施恢复造成很多不便.如何在突发事件区域内灵活部署小型网络,通过早期的预警系统以及突发事件后的救援工作是当前应急通信面临的突出问题.
无线传感器网络由大量感知节点组成,这些节点自组织成网络,形成以数据为中心的采集平台,可广泛用于环境监测、应急救灾、健康护理、安全监控等应用领域[1].笔者在此需求下提出一种基于RSSI参数纠正的无线传感器网络应急救灾系统,在应急事件发生后,在事件区域内部署传感器节点,利用节点自组织组网、实现对事件区域内被困人员的定位与信息的采集,以便采取更快速的抢救措施.
1 基于RSSI参数纠正的无线传感器网络应急救灾系统设计
在应急救灾应用中,假设被困人员身上带有腕式传感器等可穿戴设备,如何通过传感器节点的感知获取信息,快速、准确地找到事故中的被困人员及相应的信息,以展开相应的急救措施,是应急救灾系统设计的目标.快速获取事件发生的位置是无线传感器网络应用的基础,如何获得发生事件的位置是应急救灾系统设计中的首要问题之一.
1.1 RSSI参数纠正方法
目前,获得位置信息常用的测量距离的方法,有 GPS[2]、红外线[3]、超声波[4]和 RSSI[5-6]等.由于应急事情发生的急速性及相关基础通信设施破坏,造成GPS方案难以实施,而基于红外线、超声波都需要额外的硬件设备支持,增加系统实施的难度.在本系统中,采用基于RSSI的距离测量方法,考虑RSSI受环境影响的参数分析,对RSSI参数进行纠正,实现室内精确定位的功能.
基于RSSI的测距方法是利用电磁波在传输过程中,接收信号功率与传输距离存在着某种变化关系,从而根据特定环境推导出这一特定关系,实现实时系统定位[7].在无线传感器网络应用中,通常采用的无线传播模型有三种[8-9]:Free-Space模型、Two-Ray Ground Reflection模型和Shadowing模型.其中Shadowing模型充分考虑了其环境因素的变化情况.
在现实应用中,在一定的距离下接收到的信号强度是一个随机量,信号通过多径传播,产生路径损失,其路径损失表达为:

式中,d为发射节点与接收节点之间的距离;d0表示发射节点和参考节点之间的距离,一般取1 m;η为路径衰减因子,一般取值为为距离d0处信号强度的测量值;PL(d)为经过距离d后的路径损耗;Xσ为平均值为0的高斯随机变量,其标准差一般为4~10.
在此情况下,距离d后的接收功率为:

在应急救灾应用中,需要根据上式估算无线传感器网络在运行过程中,周围环境带来的路径衰减因子η和阴影Xσ.
在文献[10]中,采用MantisOS系统,通过自行研发的Ubicell[11]节点为实验平台,利用室内和室外数据的多次测量,得到基于RSSI参数纠正的路径衰减因子η和阴影Xσ.

式中:N表示采集的距离个数.

通过这两个参数修正,就可以根据RSSI估算出节点之间的距离.
1.2 定位方法实现
通过节点间的RSSI值及参数修正,可以估算出节点之间的距离信息.通过在突发事件发生的区域内部署多个传感器节点作为信标节点,来实现被困人员的定位.定位方法采用三边测距定位法,如图1所示.
在图1中,A、B、C三点为信标节点,坐标分别为 (xA,yA)、(xB,yB)和 (xC,yC),D 为应急救灾中需要定位的节点,坐标为(xD,yD).通过RSSI参数纠正方法得到D到A、B、C点的距离分别为的d1、d2和d3,则由几何关系可得:


图1 三边测距定位法Fig.1 Trilateral ranging positioning
利用该方法,可以求出应急救灾环境中需要定位的被困人员.通过采用基于RSSI的参数纠正方法,可以消除外界的各种因素干扰及累积误差,从而提高了定位精度.
1.3 应急救灾系统架构
本应急救灾系统主要有三部分组成:传感器节点、基站节点、应急措施实施服务器.传感器节点是部署在事件发生区域内部,通过节点的自组织组网,作为信标节点来实现对事件区域内部被困人员的定位.基站节点负责收集信标节点传递过来的有关被困人员的相关信息,便于实施救治策略.服务器主要用于急事件指挥人员从全局的角度来调度应急策略.应急救灾系统架构如图2所示.

图2 应急救灾系统架构Fig.2 Architecture of emergency disaster response system
2 系统测试与实现
基于RSSI参数纠正的应急救灾系统中,信标节点的操作程序基于MantisOS系统,采用AT-mega128处理器和CC1000通信模块组成.节点程序的烧写用MIB510型号的编程板来完成.通过MantisOS对Ubicell节点烧写定位信息的收/发程序,主要从参数验证和系统实现两个方面的真实位置和定位位置来分析.其信息获取数据包的格式如图3所示.
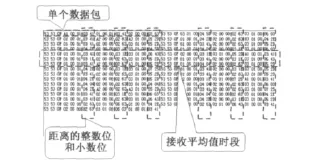
图3 数据包格式Fig.3 Packet format
2.1 基于RSSI参数纠定的定位误差分析
为了验证本修正模型的有效性,采用图3数据包格式,考虑到未知节点单个数据包得到的位置信息不精确,设置未知节点发送信息的次数,当基站接收未知节点的信号达到某一设定的值时,对接收到的数据进行平均处理,得到相对稳定的距离信息.图4是基站收到单个信息和多个信息平均后,得到的真实距离与实测距离的比较图.

图4 真实距离与实测距离比较Fig.4 Comparison of true distance and the measured distance
图4描述了真实距离与实测距离之间的关系.从图中可以看出,采用平均值的方法,得到的距离值更接近于真实距离.
2.2 系统实现
基于上述思想,在VS2008环境下,实现基于RSSI参数纠正的环境定位系统,本次实验根据室内环境设置.如图5所示,走廊左右的距离为1 m,走廊的两边标记为放置信标节点和被定位节点的位置,3、4和6位置放置的是信标节点,5号放置的为被定位节点.本次实验共采用了5个节点,基站与PC机相连,接收3、4和6号节点的测距信息,5号节点每隔3 s向信标节点发出通信.基站收到3个信标节点的信息后,得到相应的RSSI值,并根据前面介绍的纠正方法,得到3、4和6号节点到5号节点的距离信息,进而计算5号节点的位置.5号节点附近的点为定位的位置,从中可以看出,该定位方法可以在允许的范围内得到未知节点的范围,定位精度在可接受的范围内.

图5 系统实现Fig.5 System implementation
3 结论
设计并实现了一种基于RSSI参数纠正的无线传感器网络应急救灾系统,首先对当前RSSI测距存在问题提出参数修正方案,以提高RSSI测距的精度,为高精确定位打下基础,并在此基础上在室内环境下实现应急救灾情况下对被困人员的定位.实验结果表明,其修正后的方案明显提高了节点距离估计的精度,在实际的应急救灾环境中可以达到应用要求,其定位精度在一定允许的范围内.
[1]AKYILDIZ I F,SU W,SANKARASUBDAM Y,et al.Wireless sensor networks:a survey[J].Comp.Networks,2002,38(4):393-422.
[2]AZUMA R.Tracking requirement s for augmented reality[J].Communication of the ACM ,1993 ,36(7):50-51.
[3]BULUSU N ,HEIDEMANN J,EST D.GPS2less low cost outdoor localization for very small devices[J].IEEE Personal Communications Magazine ,2000,7(5):28-34.
[4]GIROD L,EST D.Robust range estimation using acoustic and multimodal sensing[C].Proc.of t he IEEE/RSJ Int’l Conf on Intelligent Robot s and Systems.Maui:IEEE Robotics and Automation Society,2001:1312-1320.
[5]GIROD L,BYCHOVSKIY V ,ELSON J,et al.Locating tiny sensors in time and space:A case study[C].Werner B ,ed.Proc.of the 2002 IEEE Int’l Conf.on Computer Design:VLSI in Computers and Processors.Freiburg:IEEE Computer Society,2002.214-219.
[6]ZHOU Gang,HE Tian,KRISHNAMURTHY S,et al.Models and solutions for radio irregularity in wireless sensor networks[J].ACM Transactions on Sensor Networks(TOSN),2006,2(2),221-262.
[7]REGHELIN R,FRÖHLICH A A,RF-based location system using cooperative calibration[C].in Proceedings of the 3rd IEEE International Workshop on Wireless Ad-hoc and Sensor Networks,New York,2006.
[8]HOMAYOUN N,HOMAYOUN H.Phase modeling of Indoor radio propagation channels[J].IEEE Transactions on Vehicular Technology,2000,49(2):220-231.
[9]THEODORE S R.Wireless communications:principles and practice[M].(2nd Edition).Prentice Hall Press ,2001 ,69-138.
[10]凡高娟,王汝传,孙力娟.基于RSSI的无线传感器网络环境参数分析与修正方案[J].南京邮电大学学报,2009,29(6):54-57.
