基于随机线性最优控制的汽车主动悬架控制器设计
2012-09-07魏民祥
桑 楠,魏民祥,白 玉
(1.南京航空航天大学能源与动力学院,江苏 南京210016;2.常州工学院机电工程学院,江苏常州213002)
0 引言
汽车悬架系统是汽车的重要组成部分,与汽车行驶安全性、操纵稳定性、舒适性有直接的关系.汽车悬架系统刚度较小,可以获得较好的行驶舒适性;汽车悬架系统刚度和阻尼较大,可以提高汽车的操纵稳定性和行驶安全性.早期的悬架系统参数一经设计在使用中便不再变动;而事实上,影响汽车舒适性、安全性、操纵稳定性的各参数在使用中是经常变化的,显然被动悬架不能满足要求.随之出现了悬架刚度和阻尼随汽车工况变化而变化的半主动悬架,相对于被动悬架汽车的平顺性和操纵稳定性得到了较大的改善,但悬架性能的进一步提高受到限制.近年伴随电子技术和计算机技术的进步,出现了主动悬架技术,汽车主动悬架系统及其控制技术成为研究的热点[1],研究结果在汽车上得到广泛的应用.
主动悬架系统的控制方法是其核心技术之一,尽管许多学者提出了各种不同的控制理论,如最优控制[2-3]、自适应控制[4]、模糊控制和神经网络控制[5-6]等控制方法,但广泛应用于主动悬架设计的是随机线性二次最优理论.
笔者设计的主动悬架采用LQG最优设计策略,利用MATLAB软件进行仿真,对主动与被动悬架建立了动力学模型,并分别对两种悬架的仿真结果,做了详细的比较分析与说明.
1 悬架系统数学模型

车辆悬架系统是一个多输入多输出的系统,建立汽车悬架的动力学模型是进行性能分析和系统设计的基础.常用的汽车数学模型包括2自由度1/4车辆模型,用以研究汽车的垂直振动问题,悬架刚度、阻尼对悬架性能的影响,没有考虑前后悬架、左右悬架、汽车重心位置对悬架性能的影响,是最为简单的主动悬架动力学模型;4自由度半车模型(纵向),用以研究前后悬架的参数匹配关系和车身垂直方向与纵向的运动耦合,考虑了重心布置对悬架的影响以及前后悬架参数耦合对悬架性能的影响,研究的结果相对于1/4车体主动悬架模型更接近于实车,但半车模型没有考虑侧倾对悬架的影响以及重心高度对悬架性能的影响,研究的结果也有一定的局限性;7自由度整车模型涉及的关系较多,它较完整地体现了垂直跳振动、俯仰变化以及侧倾的问题.笔者以车辆半车模型作为研究对象,简化为一个4自由度的线性系统,如图1所示,则主动悬架系统的运动方程为
式中:

zbA,zbB为车身位移;zwA,zwB为车轮位移;zgA、zgB为地面位移;φ为车身俯仰角位移;fdA、fdB为悬架主动力.车辆模型仿真参数及符号见表1.
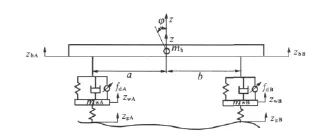
图1 半车模型Fig.1 Half-car model

表1 车辆模型仿真输入参数Tab.1 Parameters of vehicle simulation model
(1)式的状态方程可以写成如下的形式


2 LQR控制器设计
在悬架系统的设计中,选取与汽车行驶安全性、操纵稳定性以及乘坐舒适性有关的车身加速度、悬架动行程和轮胎动载荷作为性能指标进行控制.在LQR控制器设计中的目标性能函数J即为悬架动行程、轮胎动位移和车身加速度的加权平方和的积分值,表示如下:
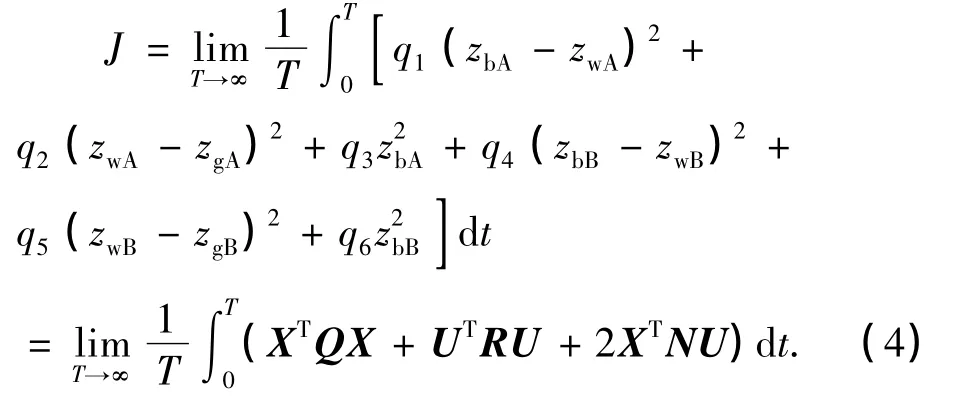
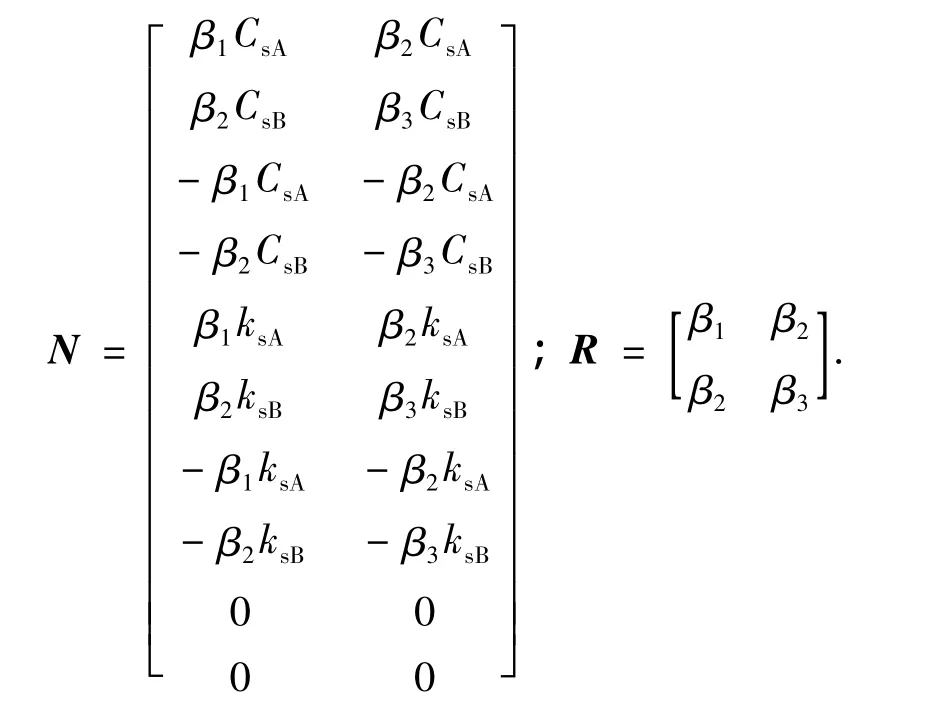
其中,q1,q4为悬架动行程加权系数;q2,q5为轮胎动位移加权系数;q3,q6为车身加速度加权系数.加权系数的选择决定设计者对悬架性能的倾向.如选择较大的q1,q4则意味着提高乘坐舒适性;如选择较大的q2,q5则意味着提高操纵稳定性.由(1)、(2)、(4)可得

确定上述车辆模型参数和加权系数后,最优控制反馈增益矩阵k可由Riccati方程求出,方程形式如下:

利用Matlab软件中的最优线性二次控制器设计函数[K,S,E]=LQR(A,B,Q,R,N)求出反馈增益矩阵K如下:

根据任意时刻的反馈状态变量就得出t时刻的最优控制力U,即:U=-KX.
3 Matlab仿真及结果分析
在Matlab软件的Simulink模块中建立半车模型的被动悬架和主动悬架仿真模型如图2所示.仿真的路面模型由式(3)确定,假设汽车以20 m/s的速度通过较差(支路,不平度系数5.0×10-6m3/cycle)路面,路面扰动选用均值为0、强度为1的高斯白噪声.在Simulink模块中进行了仿真计算,得到了主、被动悬架系统的时域仿真结果,对时域结果通过数学变换得到了主、被动悬架系统的频域结果.

图2 主动、被动悬架Matlab仿真模型Fig.2 Active and passive suspension Matlab simulation model
图3~5是主被动悬架系统时域仿真结果.从图上可以直观看出,主动悬架系统车身加速度和悬架动挠度均由明显的改进,而车轮动载荷有所增加.在Matlab软件中可以进行定量的分析结果见表2.
由表2的数据分析可知,采用主动悬架的汽车悬架的加速度最大值(均方根值)、动挠度最大值(均方根值)均有较大的改善,汽车的安全性和舒适性变好;但同时前、后的动载荷均有不同程度的上升,相对于车身加速度和悬架动挠度而言,动载荷的上升幅度较小.计算结果表明,悬架性能指标是互相制约的,舒适性和安全性以及操纵稳定性不能同时达到最优.
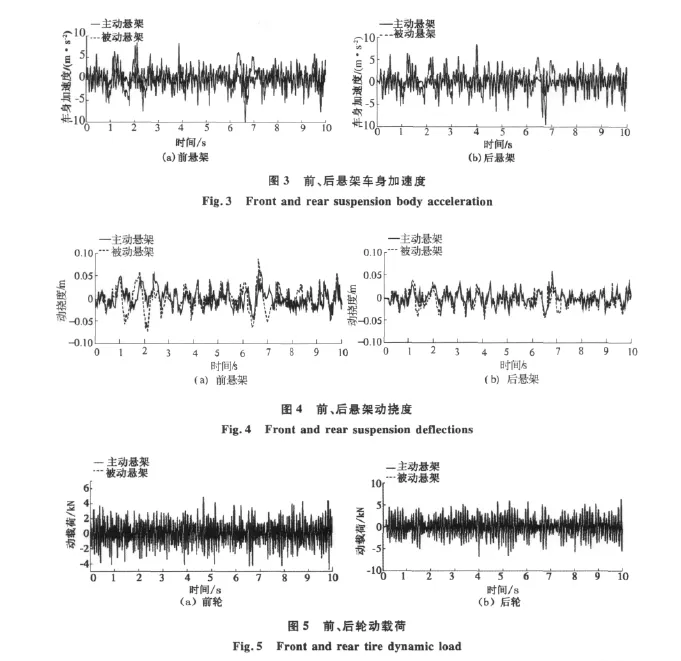

表2 主被动悬架性能指标比较Tab.2 Active and passive suspension performance
图6是主被动悬架系统频域分析结果.从图6可以看出:主动悬架车身加速度功率谱密度、悬架动挠度功率谱密度在2 Hz左右得到了极大的改善,表明主动悬架系统的舒适性变好;而前轮动位移功率谱密度表明在低频阶段轮胎的接地性能得到改善,而在8~11 Hz频率范围内轮胎的接地性能变坏.这也说明采用LQR控制策略不能同时使悬架各项性能指标达到最优.
4 结论
(1)采用LQG方法设计控制器的主动悬架能有效改善汽车的行驶平顺性和操纵稳定性,提高汽车的乘坐舒适性.对于悬架系统不同的性能指标,可以通过改变性能指标的加权系数或悬架参数,得到不同的最优控制反馈增益矩阵,以满足不同性能要求的悬架系统.
(2)由于悬架系统的性能指标是相互制约的,采用LQG方法设计的控制器不能使悬架所有的性能指标同时达到最优,在实际使用中应和其它控制策略配合使用.
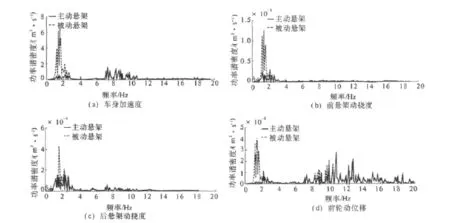
图6 悬架性能指标功率谱密度Fig.6 Power spectral density of suspension performance
(3)为方便计算,笔者在建立数学模型时进行了线性化处理,忽略了悬架系统的非线性因素,如悬架系统的摩擦力等.因此,在设计实际控制器时应充分考虑悬架系统的非线性因素.
[1]俞凡.汽车动力学及其控制[M].北京:人民交通出版社:2004.
[2]董波.主动悬架最优控制整车模型的研究[J].汽车工程,2002,24(5):422 -425.
[3]王辉,高翔,陈吉,等.基于预瞄信息的主动悬架最优控制[J].大连交通大学学报,2009,30(2):54 -57.
[4]阮观强,叶本刚.基于MATLAB仿真的汽车主动悬架与被动悬架的研究[J].上海电机学院学报,2007(12):284 -287.
[5]金耀,于德介,宋晓琳,等.汽车主动悬架的单神经元自适应控制[J].汽车工程,2006,10(4):933 -936.
[6]王东,陆森林.优化PID与神经PID控制主动悬架的性能对比研究[J].机械设计与制造,2010(10):96-98.
