航天器控制的现状与未来*
2012-09-05吴宏鑫谈树萍
吴宏鑫,谈树萍
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
学术研究
航天器控制的现状与未来*
吴宏鑫1,2,谈树萍1,2
(1.北京控制工程研究所,北京100190;2.空间智能控制技术重点实验室,北京100190)
航天器控制技术是决定航天器发展水平的关键技术之一.针对不同航天活动对航天器控制的特殊要求,分析了高性能卫星、载人航天器、月球探测器和深空探测器等航天器控制的现状.杨嘉墀院士指出航天器控制必将走向智能自主控制之路.进一步提出,航天器智能自主控制应秉承“理论方法、系统结构、器部件要同步研究”的思想和方法.从目前应用情况看,北京控制工程研究所提出的基于特征模型的智能自适应控制方法是大有前途的方法.
航天器姿态与轨道控制;智能自主控制;特征模型;智能自适应控制
航天活动简介
人类为了探索、开发和利用太空,进行了一系列航天活动.
1895年,现代航天和火箭理论的奠基人俄国康士坦丁·齐奥尔科夫斯基,在《地球与空间之梦》中首次提出了人造地球卫星的可能性.1957年10月4日苏联发射了第一颗人造地球卫星.1961年4月12日,苏联加加林遨游太空108分钟.1969年美国载人登月开创了人类登上其他星球的新纪元.1970年8月苏联实现了金星表面软着陆,开创了人类深空探测新时代.1971年美国发射的“水手”9号火星探测器成为首颗环绕火星飞行的探测器.到目前全世界已发射卫星、飞船、航天飞机、空间站和深空探测器等各种航天器6000多颗.中国从1970年4月发射第一颗人造地球卫星,至今已发射航天器130多颗,为航天事业做出了突出贡献.
人类在地球卫星、载人航天和空间探测三大领域开展了广泛活动,取得了辉煌的成就.
1 航天器控制现状
航天器控制技术(包括制导、导航与控制)在航天活动中起着极其重要的作用,是确保航天器能够完成飞行任务和代表航天器运行水平的重要关键技术之一.
北京控制工程研究所承担了中国80%以上的航天器控制系统设计和产品研制工作:
1)已掌握了三轴稳定卫星、自旋稳定卫星、双自旋稳定卫星的姿态和轨道控制技术以及深空探测制导与导航技术;
2)形成了6大类航天器控制系统与3大类航天器推进系统.
航天器控制的水平和特点主要体现在3个方面,即航天器控制性能、航天器控制方法和不同类型航天器对控制性能的特殊要求.
航天器控制性能可分为4个等级,具体见表1.中国现有的在轨飞行卫星达到了高精度水平,正在预研超高精度的航天器,探索甚高精度的航天器.美国1990年发射的哈勃空间望远镜实现了甚高精度水平.日本的ALOS卫星实现了超高精度水平.

表1 航天器姿态控制性能Tab.1 Performance of spacecraft attitude control
从航天器控制方法来看,21世纪前航天器控制技术基本上属于地面站干预的自动控制.控制方法主要用的是经典的PID控制和相平面控制.在少数领域探讨和尝试一些新的方法,如H∞、鲁棒控制、自适应控制、最优控制等.
从不同航天活动对航天器控制的特殊要求来看,根据航天器的结构、执行任务及控制性能的不同,可将航天器控制分三种情况:
① 高性能卫星控制;② 载人航天器控制;③ 月球探测器与深空探测器的控制.
1.1 高性能卫星的控制
人造地球卫星按运行轨道划分,可分为中低轨道卫星、高轨道卫星.
按姿态控制精度一般可分为:一般精度,高精度(包括一般高精度、超高精度、甚高精度).
高性能包括卫星本体姿态精度高及有效载荷指向精度高.对于结构和参数基本不变的卫星,其高精度控制要考虑挠性、干扰、噪声等方面的影响.对于具有结构和参数时变的复杂航天器,要实现高精度和高稳定度控制,控制系统必须具有很强的适应能力和鲁棒性.
1.1.1 高精度卫星姿态控制
(1)中低轨道卫星的高精度控制
卫星的高精度姿态控制不仅需要解决控制器的算法问题,还必须从系统、结构、材料等方面采取多种技术措施来保证.
下面以美国哈勃空间望远镜为例简单介绍.参考文献[1]和[2]介绍,哈勃空间望远镜科学观测模式的指向精度0.01″,姿态抖动度达到0.007″(不小于10小时),属甚高精度的控制范围.
哈勃空间望远镜姿态控制方法主要为PID控制加结构滤波器,并采取以下措施:
1)采用星敏感器及精确制导敏感器[3](Fine Guidance Sensors)提供高精度姿态测量信息,精确制导敏感器的测量范围约±0.02″,能提供0.001″的测量精度;
2)为了满足有效载荷成像,提出了十分苛刻的抖动指标[1];在飞轮电机驱动电路设计中采用了飞轮隔振器降低电噪声的措施.这些措施使哈勃空间望远镜达到了极高的姿态控制精度与抖动抑制水平[3];
3)采用动力学参数在轨辨识技术,解决在进出地影时姿态受热扰影响的问题;
4)挠性振动一直是困扰卫星高精度控制的主要问题,通过更换太阳帆板、安装帆板挠性阻尼器,消除了哈勃空间望远镜大挠性附件的“热拍”和振动.
(2)高轨道卫星姿态控制
中国高轨通信卫星在进入地球同步轨道之前,通过大推力发动机点火进行远地点变轨.远地点变轨时系统动力学具有不确定性、时变、非线性等特点:
1)液体燃料的晃动带来相应的干扰力矩;
2)继电器型的喷气执行机构以及具有饱和特性的敏感器带来了较强的非线性;
3)燃料的不断消耗导致系统动力学特性随时间变化;
4)通过有限元和地面实验建立液体晃动模型,存在参数和结构的不确定性.
针对远地点变轨时控制对象的时变特性,目前采用的主要做法是结合工程经验反复校核、折衷,按特征点分别设计多组控制器.但这种设计方法适用范围有限.为此,加强了自适应控制方法的研究.
1.1.2 快速机动与稳定姿态控制
复杂卫星大角度机动时,卫星姿态动力学非线性问题变得更加严重,同时大角度快速机动,容易激励帆板等挠性附件的振动、推进剂的晃动,使得机动后姿态达到甚高精度稳定所需的时间大大增加;星上部件的实际输出特性对控制性能同样具有较大的影响.
上述问题对卫星的控制提出了新的要求,传统的基于集中参数式的姿态控制方法难以抑制结构振动.必须对整个系统结构进行设计以达到性能要求,包括采用具有高动态性能的敏感器和执行机构、提高帆板刚度等.
以美国卫星WorldView1为例,卫星采用超稳平台、高精度姿态敏感器(如星敏感器)和 GPS,采用控制力矩陀螺使得具有姿态快速重定位能力,可以实现同轨立体成像.卫星可实现2.5(°)/s2最大加速度和4.5(°)/s的最大角速度[4].通过设计提高了帆板结构刚度.
1.1.3 星座控制
星座控制涉及到两个方面的内容,一是传统的单星轨道和姿态控制,二是星座构型保持与轨道控制,即相对姿态与相对轨道控制.美国GPS星座和中国的二代导航星座是典型的星座.
以中国二代导航星座为例,为了实现高精度导航,与以往高轨卫星相比,单星的姿态和轨道控制系统主要有以下几个特点:
(1)尽量消除姿态控制对卫星轨道的影响,保证一段时间内导航信号的连续性;
(2)采取有效的控制补偿措施,消除太阳光压等干扰力矩对卫星姿态的影响;
(3)实施卫星偏航角和太阳帆板转角的主动测量和控制(特别是倾斜轨道卫星),保证卫星能源的供应.
1.2 载人航天器控制
载人航天器包括空间站以及往返于天地之间的载人飞船、货运飞船、航天飞机.
控制关键技术包括:高精度安全返回技术;交会对接技术.
1.2.1 载人飞船返回再入控制
为了保障航天员的安全着陆,载人飞船要求能够准确、安全、平稳返回地球,因此对控制器设计提出了很高的要求.
在飞船再入段落点控制设计中,美苏等国家掌握了可用于返回再入控制器设计的重要参数,采用解析制导、查表设计控制参数等方法.中国由于环境数据及参数不确知,由胡军研究员等创造性地应用全系数自适应控制理论和思想设计返回再入控制,八艘“神舟”飞船开伞点控制精度均优于总体技术指标,稳定于10km左右,着陆平稳,飞船返回着陆精度达到国际先进水平.
1.2.2 交会对接控制
交会对接一般有两种方式:直接碰撞对接和用机械臂抓捕对接.中国目前采用第一种方式.按控制方式又可分为人控交会对接和自动控制交会对接.
近十多年来,交会对接技术逐渐向自主方向发展.除俄罗斯因为已经拥有具有自动交会能力的联盟号和进步号飞船外,美国、日本和欧洲都进行了与自主交会对接技术相关的飞行试验.典型的有:日本的ETS-VII和HTV、美国的XSS系列卫星、美国的DART卫星、美国的“轨道快车”计划和欧洲的ATV飞船等.中国“神舟八号”飞船也采用自主交会对接.
2011年11月中国“神舟八号”飞船与“天宫一号”目标飞行器交会对接圆满成功,水平很高.“神舟八号”飞船副总师胡军研究员和主任设计师解永春研究员为代表的团队正确地将理论、工程和经验很好结合,将“基于特征模型的智能自适应控制”作为重要理论依据之一[5],紧紧抓住工程的实际特点,创造性地对交会对接的制导、导航与控制方案进行了设计和系统优化,实现了准确测量、精确控制、完美对接,摘取了航天器控制的一颗明珠,达到了国际先进水平,使中国成为世界上第三个独立掌握交会对接技术的国家,为未来空间站建设奠定了重要基础.
交会对接有关说明如下:
(1)空间交会对接过程简要说明
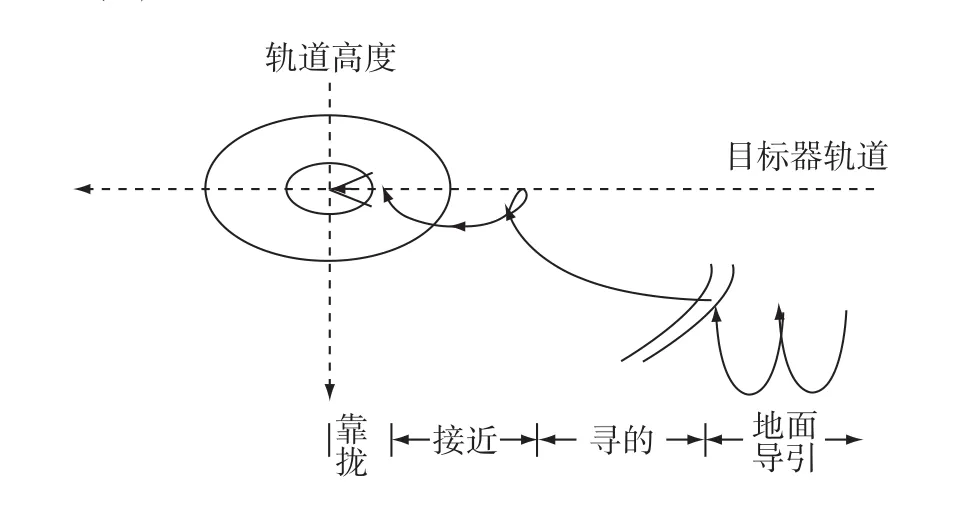
图1 空间交会对接简图Fig.1 Sketch of space rendezvous and docking
交会对接过程(见图1)一般分为远程地面导引段和自主控制段,自主控制段又分为寻的段、接近段、平移靠拢段和对接段,逐步实现相对距离由远到近、控制精度由粗到精的高精度控制,最后实现对接[5].
(2)交会对接控制难点及解决途径:①挠性、时延、姿态与位置耦合和羽流干扰;②基于特征模型的相平面自适应控制,即基于二阶结构型原理,采用相平面框架并按照黄金分割比计算相平面中的控制参数、根据相对距离自动修改相平面参数[5].
(3)交会对接精度包括停控点精度和接触点精度,中国首次交会对接均达到世界先进水平.
1.2.3 空间站控制
从动力学和控制的角度来看,空间站具有如下特点:
(1)结构显著变化.
(2)质量、空间跨度大,气动力矩、引力梯度力矩等外部力矩不可忽视.
(3)空间站上的太阳帆板、大型天线等具有大挠性的有效载荷或是在空间在轨组装的,或是在空间展开的,因此在地面上难以准确获知其动力学参数.
这些特点使得空间站的姿态控制比一般航天器的姿态控制难度更大.
从控制理论上看,提出了带有挠性有效载荷的大型组合体在结构变化、动力学参数不确定情况下实现具有性能鲁棒性、适应性的控制系统设计问题.
1.3 月球探测器和深空探测器的控制
1.3.1 地月转移轨道修正控制[6-7]
卫星奔月的方式有两种:第一种是直接发射进入地月转移轨道,“嫦娥二号”(CE-2)卫星直接由火箭发射至地月转移轨道,节省了地月转移的时间,但要求火箭具有大的推力;第二种是绕地球变轨之后进入地月转移轨道,“嫦娥一号”(CE-1)卫星就采用了第二种方式,所需时间较长(见图2).
“嫦娥一号”卫星制导、导航与控制系统实现了高可靠、高精度的变轨控制.
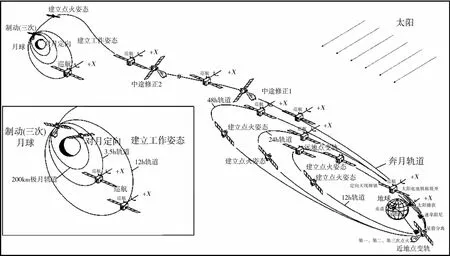
图2 CE-1卫星奔月轨道Fig.2 Lunar transfer orbit of CE-1 satellite
“嫦娥二号”卫星直接由火箭发射至地月转移轨道,取消了调相轨道,节省了地月转移的时间(见图3).
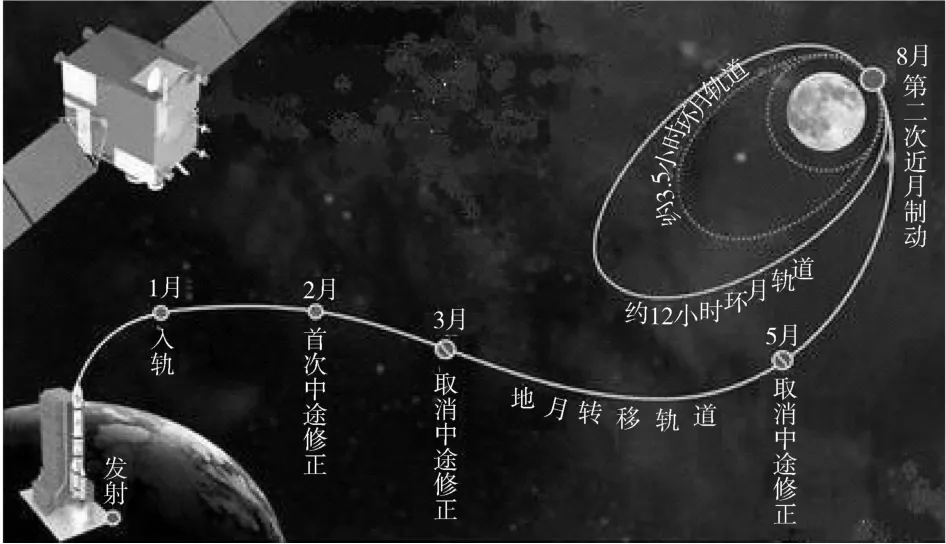
图3 CE-2卫星奔月轨道Fig.3 Lunar transfer orbit of CE-2 satellite
1.3.2 对月三体自主指向的耦合控制
中国“嫦娥一号”卫星实现了自主三体指向控制:星本体对月定向;帆板法线对准太阳,即与太阳方向夹角最小;双轴天线指向地球.
“嫦娥二号”卫星在地月转移段验证了以下技术:①两个紫外敏感器视场做到无缝覆盖,用软件方法解决了月球边缘信息提取和晨昏线去除的难题;②由紫外敏感器获取月心视线方向和视半径信息,结合星敏感器提供的姿态信息,采用滤波技术获得卫星的位置和速度.
1.3.3 月球软着陆控制
中国探月二期的工程目标之一是成功实施月面软着陆.制导、导航和控制技术是月球软着陆的关键技术.在月球软着陆过程中,着陆器GNC系统的任务和工作条件与以往研制的卫星和飞船差别非常大.月球软着陆过程时间很短(10m in左右),而地面测控时延大,因此要求GNC系统具有很高的自主性和实时性;软着陆过程依靠主动制动减速,推进剂消耗量很大(约占动力下降段初始探测器质量的一半),制导律的设计需要充分考虑推进剂优化;软着陆任务要求保证着陆的高安全性,因此对着陆过程的导航、障碍识别和避障制导都提出了很高的要求;另外,还需要考虑月面特殊环境的影响.
主要关键技术包括:
(1)月球软着陆动力学建模与姿态控制方法;
(2)月球软着陆自主导航方法;
(3)月球软着陆制导控制方法;
(4)月面障碍识别与安全着陆区选取算法;
(5)基于光学的特征匹配跟踪导航算法.
而月面巡视探测器必须具有月面移动性、环境适应性、任务自主性和科学实用性四个基本性能,开拓了空间探测器研制的新领域.
1.3.4 自月球返回地球再入控制
自月球返回地球的再入控制是中国探月三期的重要关键技术之一.
为了满足在第二宇宙速度下精确再入任务的要求,返回再入控制方式目前可分为直接进入大气层式和跳跃式等不同形式.
跳跃式返回再入控制的优点是延长返回器再入航程,扩展再入走廊宽度,提高着陆精度(见图4). 1.3.5 深空探测的自主导航和自主控制
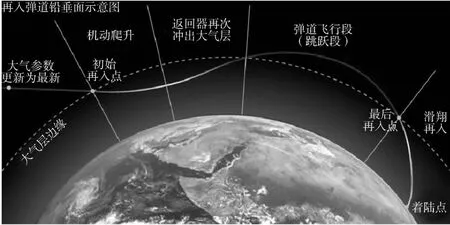
图4 再入弹道铅垂面示意图Fig.4 Sketch figure for plumb plane of re-entry ballistic trajectory
星地距离远、时延大,无法实时监控,尤其在长时间的日凌期间,地面测控站将无法与探测器建立联系,而对于远距离天体捕获和环绕探测任务,必须有足够高的轨道控制精度才能保证制动和环绕飞行安全.因此,自主导航、自主轨道规划与控制能力是深空探测GNC的重要技术之一.
1998年10月24日发射的美国“深空一号”第一次成功地在轨验证了真正的深空探测自主导航系统.参考文献[8]介绍,在巡航阶段验证了基于导航相机获取的小行星和背景恒星图像的自主导航方法.在接近和飞越小行星或彗星阶段利用基于目标天体图像的自主导航,所采用的自主导航方案及试验飞行结果如图5所示.其自主导航系统能够自主地进行拍照序列规划、图像处理和分析、轨道确定、星历修正、轨道修正和姿态机动.微型图像相机和分光仪是深空1号自主导航系统的关键敏感器,具有获得高质量小行星图像和背景恒星图像的能力.
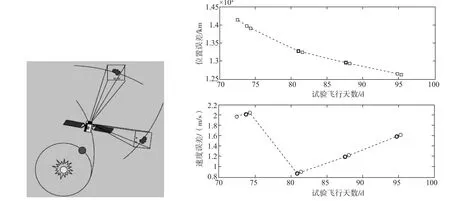
图5 深空一号地火转移段自主导航方案及试验飞行结果Fig.5 Autonomous navigation scheme and flight experimental results for the Earth-Mars transfer course of DS-1
2 航天器控制的发展
随着航天事业的发展,航天器的结构越来越复杂,从小卫星到大卫星;航天器控制的任务从单一到多种;航天器控制性能要求越来越高.
为使航天器控制满足航天事业发展的需要,必须发展智能自主控制,从航天器系统以及关键部件和航天器控制理论两个方面同步进行.
2.1 航天器智能自主控制
所谓航天器智能自主控制就是在航天器控制系统中引入人工智能与智能控制等相关技术,使航天器在不确定环境下以及内部结构和参数变化时,在无外界帮助条件下,自主实现高精度、高稳定度、强适应和长寿命的正常运行.利用智能控制实现航天器自主运行,即航天器不依赖地面站和人造坐标的支持,完全依靠航天器上软硬件设备自身的能力实现航天器的自主运行.
杨嘉墀院士于1995年提出了发展空间智能自主控制的倡议,并指出航天器控制必将走向智能自主控制之路[9].自主运行是目的,智能和自主是航天器自主运行的手段.这与国际上的发展思路相一致.据有关报道,美国最近明确提出航空航天在控制领域的突破点是智能自主控制,为此美国制定了一系列相应的政策.
杨嘉墀院士1995年发表文章明确提出,对中国来说发展智能自主控制技术更有其必要性[9]:
(1)提高航天器控制性能的需要;
(2)保证航天器长期可靠运行的需要; (3)地面测控站资源有限性的需求;
(4)在轨运行的航天器数量增加的需求;
(5)国防事业的需求.
目前航天智能自主控制主要研究以下四个方面:
(1)航天器自主导航;
(2)航天器姿态和轨道的智能自主控制; (3)航天器故障的自主诊断和系统重构; (4)航天器信息智能自主管理.
鉴于航天器智能自主控制的实现不仅是一个数学模型和算法,还需要多方面的研究成果集成.因此航天器智能自主控制应秉承“理论方法、系统结构、器部件要同步研究”的思想和方法.
航天器智能自主控制必须要有一个长期的规划,北京控制工程研究所提出了分三个阶段进行航天器智能自主控制的发展思路:
(1)初级智能自主控制——地面为主,星上为辅;
(2)中级智能自主控制——半自主运行;自主导航180天,地面测控网与星上自主相结合;
(3)高级智能自主控制——全自主运行,有临场决策能力.
2.2 航天器控制系统及部件的发展
从控制系统结构上看,原先为单一的集中模式,现在正在向分布式、多模块切换、组合协调方式过渡,向着自主故障诊断和系统重构方式发展.北京控制工程研究所已在故障自主安全运行模式等方面做了大量工作,并且已经形成了六大类航天器控制系统与三大类航天器推进系统,包括:返回式三轴稳定卫星控制及程控系统、静止轨道双自旋稳定控制系统、静止轨道三轴稳定控制系统、太阳同步轨道三轴稳定控制系统、载人飞船GNC系统、小卫星控制系统、冷气推进系统、单组元统一推进系统、双组元统一推进系统等.
从部件方面看,正在从大型、分散化向小型化、集中化方向发展,从跟踪引进方式已逐步走向自主研发的道路,如星敏感器、紫外敏感器、飞轮、各种能力的推力器.经过五十多年的艰苦奋斗,北京控制工程研究所在惯性测量单元、光学敏感器、星载计算机、角动量交换执行机构、帆板驱动机构、天线驱动机构、磁力矩器、推力器等敏感器、控制器、执行机构器部件等方面取得了系列成熟的型谱化星载产品.
2.3 航天器控制理论的发展
航天器控制自20世纪后半叶至今,主要是以频域方法为主的PID控制及相平面控制.
先进控制方法鲜见应用于航天器控制主要缘于两方面的原因:一是过去简单航天器对先进控制方法需求不迫切;二是目前先进控制理论研究与工程需求存在脱节.
以自适应控制发展为例,自适应控制方法自上世纪五十年代提出至今,在理论研究方面获得了大量丰富的结果.但现有自适应控制对高阶参数未知对象的参数辨识存在困难:首先在工程上,系统测量仪器一般只能测得位置、速度和加速度信息,而高阶的信息在工程上无法测得,一般只能通过已测信息进行数学计算获得,这对具有多个未知参数系统的辨识在工程上是难以实现的.再则,在辨识过程中,未知参数未收敛之前如何能保证系统在过渡过程稳定?另外,自适应控制调节参数过多,并且自适应控制难以解决小性噪比的情况.目前很多的自适应控制理论研究论文对上述问题很少涉及,理论研究与实际需求脱节.
为解决航天器智能自主控制问题,北京控制工程研究所提出一种智能自主控制方法[10],即基于特征模型的智能自适应控制,把智能与自适应控制结合考虑.从目前应用情况看,这是大有前途的方法.
[1] Jane’s Information Group.Hubble space telescope[M]. USA:Jane’s Space Systems and Industry,11-Nov-2010
[2] Andersen G C.An overview of the hubble space telescope pointing control system design and operation[R]. AIAA Guidance,Navigation and Control Conference,Hilton Head Island,SC,August 10-12,1992
[3] Beals G A,Crum R C,Dougherty H J,et al.Hubble space telescope precision pointing control system[J]. Journal of Guidance Control and Dynamics,11(2),119-123,1988
[4] Jane’s Information Group.WorldView series[M].USA: Jane’s Space Systems and Industry,26-Jan-2011
[5] 胡军,解永春,张昊,等.神舟八号飞船交会对接制导、导航与控制系统及其飞行结果评价[J].空间控制技术与应用,2011,37(6):1-5 Hu J,Xie Y C,Zhang H,et al.Shenzhou-8 spacecraft guidance navigation and control system and flight result evaluation for rendezvous and docking[J].Aerospace Control and Application,2011,37(6):1-5
[6] 叶培建,孙泽洲,饶炜.嫦娥一号月球探测卫星研制综述[J].航天器工程,2007,16(6):9-15 Ye P J,Sun Z Z,RaoW.Research and development of ChangE-1[J].Spacecraft Engineering,2007,16(6):9-15
[7] 杨维廉,周文艳.嫦娥一号卫星地月转移轨道中途修正分析[J].空间控制技术与应用,2008,34(6):3-7 Yang W L,Zhou W Y.Analysis on m idcourse correction of translunar trajectory for CE-1[J].Aerospace control and Application,2008,34(6):3-7
[8] 杨保华.航天器制导、导航与控制[M].北京:中国科学技术出版社,2011 Yang B H,Guidance、navigation and control for spacecraft[M].Beijing:Science and Technologh Press of China,2011
[9] Yang JC.Development of intelligent autonomous control technology for the Chinese space program.IFAC[C]. International Conference on Intelligent Autonomous Control in Aerospace 95,Beijing,China,August 14-16,1995.
[10] 吴宏鑫,胡军,解永春.基于特征模型的智能自适应控制[M].北京:中国科学技术出版社,2009 Wu H X,Hu J,Xie Y C,Characteristic model-based Intelligent Adaptive Control[M].Beijing:Science and Technology Press of China,2009
Spacecraft Control:Present and Future
WU Hongxin1,2,TAN Shuping1,2
(1.Beijing Institute of Control Engineering,Beijing 100190,China; 2.Science and Technology on Space Intelligent Control Laboratory,Beijing 100190,China)
Spacecraft control technology is one of the key techniques dom inating the spacecraft development level.According to special requirements for spacecraft control raised by different space activities,the state of the art of the spacecraft control in high-performance satellites,manned spacecraft,lunar and deep space exploration is analyzed.Academician Yang Jiachi pointed out that spacecraft control was bound to walk towards intelligent autonomous control.It is further proposed in this paper that spacecraft intelligent autonomous control ought to inherit the idea and methodology of“synchronous research of theoretical approach,system architecture and components”.The characteristic-model-based intelligent adaptive control is presently proposed at Beijing Institute of Control Engineering,being shown to be a prom ising method from the view point of the current application.
spacecraft attitude and orbit control;intelligent autonomous control;characteristic model; intelligent adaptive control
V44
A
1674-1579(2012)05-0001-07
吴宏鑫(1939—),男,院士,研究方向为自适应控制和智能控制理论与应用研究;谈树萍(1978—),女,高级工程师,研究方向为航天器控制.
*本文是根据2011年中国自动化大会和2011年中国宇航学会大会报告修改整理而成.国家自然科学基金重点资助项目(60736023).
2012-04-10
DO I:10.3969/j.issn.1674-1579.2012.05.001
