基于视频图像与直接线性变换理论的车辆运动信息重构*
2012-09-03韩学源金先龙张晓云苗新强
韩学源,金先龙,张晓云,苗新强
(1.上海交通大学,机械系统与振动国家重点实验室,上海 200240; 2.上海交通大学机械与动力工程学院,上海 200240)
前言
在交通事故的处理过程中,须要根据相关信息,采用多种方法,推知事故过程的详细信息,从而判断事故责任方。在主要道路口安装监控摄像机,使交通管理部门能够通过查看记录视频获知事故发生时的现场情况,但是仅仅通过查看视频,并不能获取具体数据,例如相关车辆的运动轨迹与行驶速度等,因此也不能在事故案例分析中为碰撞模拟和受力分析提供相关参数或验证数据,也不能提供事故责任的判断依据[1]。
对于事故现场的车辆运动轨迹,目前主要是通过手工测量现场的制动痕迹,或是借助分析软件,根据车辆位置和车速等参数进行仿真模拟[2]。
目前应用较广泛的测量车速的方法有基于微波雷达、基于激光技术[3]和地感线圈等测速方法。微波雷达应用多普勒效应,当被测目标接近或远离发射装置时,反射波频率会发生相应变化,通过频率的改变来确定目标速度,但对于具有多车辆、多行人的复杂路况,使用微波雷达侦测车速具有较大困难。激光测速通过激光测距原理或多普勒测速原理来实现,但该方法对被测物的反射面要求较高,且低质量的激光测速仪容易对人眼造成伤害。地感线圈测速系统在地表埋设线圈,与电容构成振荡电路,当运动物体经过时,引起振荡频率的变化,根据频率的变化计算出车速。该方法须埋设感应线圈,施工量大,路面一旦变更须重新埋设线圈,对于路面质量不好的地方,线圈的维护工作量巨大。
摄影测量和计算机图形处理技术应用于交通事故现场测量,为事故分析提供了新的解决方法[4]。由监控录像解帧得到的现场相片,可以使用摄影测量理论的直接线性变换解法(direct linear transformation,DLT)。它是建立像点坐标和相应物点物方空间坐标之间直接线性关系的算法[5],特别适用于非测量相机,如普通相机、高速摄影机和CCD摄像机等。
本文中基于摄影测量的直接线性变换法,从事故现场的监控录像中提取出相片,对相片进行相关分析,求得像素点坐标与物方坐标的透视变换关系,建立事故现场车辆运行轨迹的二维模型,进而求得车辆运行距离和车速等信息。
1 数学模型
1.1 二维直接线性变换解法
相片上的像点数字阵列坐标(u,v)与对应物点的物方空间坐标(X,Y)有以下关系:
式中:l为直接线性变换矩阵。
当控制点大于4个时,式(1)所构成的线性矩阵方程为
式(3)建立了空间二维平面与像平面的直接线性变换关系,该方法无须确定相机内方位元素和框标,在确定4个或4个以上平面控制点坐标的情况下,根据控制点的像点坐标和所测实际空间坐标,即可进行二维直接线性变换求解,得到二维直接线性变换的系数矩阵l,通过此矩阵可建立像素坐标与空间坐标之间的对应关系,进而可对事故现场进行重构。该方法因不需要内、外方位元素的初始值,因此特别适用于普通摄像机所摄相片[6]。
1.2 求解方法
对于监控相机拍摄得到的视频信息,在Matlab中编程求解其车速,根据现场所测得的控制点坐标信息,由式(3)可求得图片的直接线性变换矩阵。
通过视频处理软件对所拍摄视频进行解帧,得到视频每秒内的所有相片。根据具体情况,确定每秒所需相片数量,如每秒24幅,或每秒12幅。
得到事故过程的相关图片后,需要选择图片上某个标记点,例如可以选择车轮与地面的接触点,并在所有解帧图片上点选此标记点。然后将此标记点在各个图片上的像素位置保存记录,构成车辆行驶的像素坐标标记点数组。
通过直接线性变换系数矩阵,可将标记点的所有像素点坐标进行正投影变换,得到车辆行驶标记点的二维重构图。
在Matlab中用如下拟合函数:
将标记点进行拟合,并对拟合函数求微积分,得到拟合曲线函数和曲线长度。
由视频的帧速信息,可知解帧所得到的相片组所经历的总时间,从而可得到车辆行驶速度,并拟合出位移函数和速度变化率等。
2 案例分析
以2010年某日发生的交通事故为例,图1为由肇事车辆从监控相机下驶过的视频中解帧得到的相片,由于现场的井盖位置固定不变,测得现场井盖之间的距离如图1所示。
图1中以控制点1为原点,控制点1和控制点2的连线作为X向,连线的垂直方向为Y向,现场测得距离如表1所示。

表1 现场测得控制点之间的距离 m
通过余弦定理,解得5个控制点的坐标如表2所示。
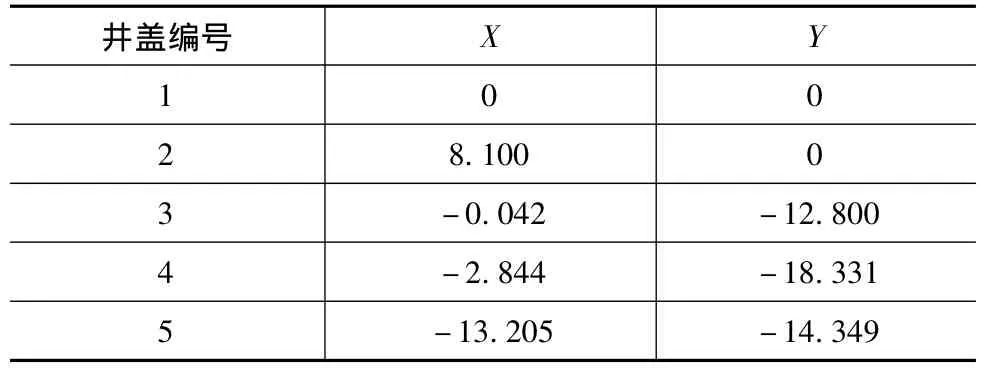
表2 控制点坐标 m
根据直接线性变换求解方法,将上述坐标和5个井盖在相片中的像素坐标分别代入式(3),即可求得直接线性变换矩阵l,通过矩阵l,可对事故现场相关信息进行二维重构。
将事故碰撞过程视频进行解帧,在每幅解帧图片上分别标记出车轮与地面接触点的位置,并保存标记点的像素坐标数组,然后用求得的直接线性变换矩阵l进行二维投影,得到车辆标记点的二维重构图,测算车辆所行驶的总距离,结合所解帧照片的总时间,可求得肇事车辆的车速。
针对该案例,在监控视频中提取碰撞过程的视频,并将其转换为解帧图片,在每幅图片上标示前车轮与地面相接触的标记点,如图2所示。
通过直接线性变换求得的矩阵l,可对前轮与地面接触的标记点进行正投影变换,对于本案例中车辆行驶的轨迹,用二次函数Y=a2X2+a1X+a0即可得到较为理想的拟合曲线,求得其拟合函数为Y=0.0059X2+0.0514X-7.3348,如图3所示,其中点 1、2、3、4、5 为现场的控制点标定物(井盖)位置。
对拟合曲线函数在所选区间内用积分求解曲线弧长,其计算公式为
式中:Y'为函数Y的导数,计算得到的标记点坐标X1=-7.0444m,X27=11.0463m,求得曲线长度为18.176m,监控视频的帧速为24帧/s,所截取的27幅图片共历时26/24s,计算得车速为16.778m/s,即60.40km/h。
考虑到手工选点可能产生实验误差,对后轮采用同样方法进行分析,对实验结果求均值。从第一幅图片上的后轮与地面相接触的标记点开始标示,共标示记录27个标记点,如图4所示。
同样地,对投影变换所得到的标记点用二次函数曲线拟合,如图5所示,并对拟合曲线求积分,求得曲线长度为18.199m,与前轮行驶距离相接近。监控视频的帧速为24帧/s,所截取的27幅图片共历 时 26/24s,计 算 得 车 速 为 16.799m/s,即60.48km/h。
对前后轮所得结果求均值,即车速为(60.40+60.48)/2=60.44km/h。事故报告中用专业测量软件Photomodeler分析,并通过在现场实地测量验证,所测得的肇事车辆在监控视频内的平均车速为59.21km/h。本文中所述方法与事故报告中所测结果相吻合,误差为2.1%,可见,该方法通过将每秒的运动过程细化到24帧图像来求解,能够满足求解精度的要求。
同时,可进一步对27个标记点逐个进行积分,定性分析车辆在此时间内的制动情况。建立在每个标记点处车辆相对于开始计时所行驶的总距离为
式中n=1,2,3,…,26。由于相邻标记点之间的时间间隔为1/24s,因此,根据上述位移积分,对点(Sn,n/24)进行拟合,可建立位移与时间之间的拟合函数和曲线,对位移拟合函数求导,进而可得到速度变化率的拟合曲线,如图6所示。
由图6(b)可知,在此监控视频的1.083s时间段内,车辆处于减速状态,这与肇事车辆在监控视频所摄路段内已开始制动减速的事实情况相符。
通过上述案例可知,结合摄影测量理论,通过对视频的解帧分析,不仅能求得运动参数,如速度和位移等,而且能求得其运动状态的变化,如加速度等。
为使分析结果更精确,可从以下几方面改进。
(1)根据摄影测量理论,为得到更精确的直接线性变换系数矩阵,安置监控相机时尽可能采用大的拍摄倾角[7]。
(2)如果条件允许,可在现场适当位置布置充足精确的控制点,以提高直接线性变换矩阵的精度[8]。
(3)采用高质量的监控相机,提高监控视频的清晰度[9]。
(4)在数据分析时可重复若干次实验求平均值,减小因手工选点所产生的误差。
3 结束语
为求解交通事故现场肇事车辆的速度参数,通过对监控视频进行解帧,得到车辆行驶轨迹的相片组,结合像点坐标与物方空间坐标的直接线性变换关系式,得到车辆运动轨迹的正投影变换图,并用曲线拟合,得到车辆运行轨迹的二维重构图,进而可求得车辆运行距离和车速等信息。本文中采用二维直接线性变换法,获取车辆运动轨迹时是通过标记车轮与地面的接触点来提取的,可以对该方法进行扩展,采用三维直接线性变换,求得相片上任一点的三维空间坐标,这样就可通过标记车身任一部位,获取其运行轨迹,进而求得车辆速度等相关信息。
[1]金先龙,张晓云.交通事故数字化重构理论与实践[M].北京:人民交通出版社,2007:20.
[2]杜新光,金先龙,张晓云,等.基于摄影测量技术的交通事故再现几何特征提取[J].上海交通大学学报,2008,42(6):861-864.
[3]安福东.机动车的几种测速方式原理及性能的分析比较[J].警察技术,2003(3):33-35.
[4]Benjamin Coifman,David Beymer,Philip McLauchlan,et al.A Real-time Computer Vision System for Vehicle Tracking and Traffic Surveillance[J].Transportation Research Part C-Emerging Technologies,1998,6(4):271-288.
[5]Akio Yoneyama.Robust Traffic Event Extraction from Surveillance Video[J].Visual Communications and Image Processing,2004,Part 1&2,5308:1019-1030.
[6]杨博,金先龙,张晓云,等.基于数字化摄影测量交通事故信息采集和过程再现[J].汽车工程,2010,32(6):530-546.
[7]冯文灏.近景摄影测量[M].武汉:武汉大学出版社,2002:62-68.
[8]龚涛.近景摄影测量控制点布设方案的研究[J].西南交通大学学报,1997,32(3):330-335.
[9]陆玉凯,金先龙,侯心一.数字摄影测量技术在交通事故再现中的应用[J].计算机辅助设计与图形学学报,2005,17(10):2318-2322.
