基于车路协同的动态车辆安全状态评价模型
2012-09-02田晶晶李世武孙文财杨志发王琳虹
田晶晶,李世武,孙文财,杨志发,王琳虹
(吉林大学交通学院,130022长春)
我国道路交通安全形势日益严峻,据公安部交通管理局统计,2009年全国共发生道路交通事故238351起,造成67759人死亡,其中营运车辆导致一次死亡10人以上的重特大道路交通事故多达19起.营运车辆行车安全问题已经成为道路交通安全亟待解决的关键问题之一,车辆安全状态评价是其中的关键技术.针对车辆安全状态评方法,国内外学者进行了大量的研究,如郭孜政分别用贝叶斯、FCM和BP神经网络建立了驾驶行为危险度的评价模型[1];艾力·斯木吐拉利用模糊综合评价法对驾驶员安全特性进行评价[2].现有的研究主要关于驾驶员安全状态评价,对动态车辆安全状态综合评价方法研究不足.针对车辆安全状态评价中存在的信息不完备及模糊性等问题,本文提出了一种基于车路协同的动态车辆安全状态评价体系,建立了用于车辆直线跟车行驶和转弯行驶时动态车辆安全状态评价模型.
1 车辆安全状态影响因素分析
1.1 车辆安全状态影响因素
美国学者TREAT的研究结果表明:道路交通系统中,人、车和路因素对车辆安全状态的影响作用是相互关联的[3],其相互关系统计结果为:人、车、路、人车、人路、车路、人车路事故诱因比例分别为57%、2%、3%、6%、37%、1%、3%.
公安部交通管理局2009年全国道路交通事故统计数据表明:车辆安全状态影响因素中,驾驶员因素最主要,其次是车辆因素,此外环境因素和管理因素也是不可忽视的.本文根据车辆状态信息采集方法的不同对车辆安全状态影响因素进行分类[4],如表1所示.

表1 车辆安全状态影响因素分类
1.2 评价指标参数获取
根据车辆安全状态影响因素分析及分类研究结果,本文提出了基于车-路协同信息采集技术与多传感器数据采集技术相融合的动态车辆安全状态评价指标参数的获取方案[5],如图1.
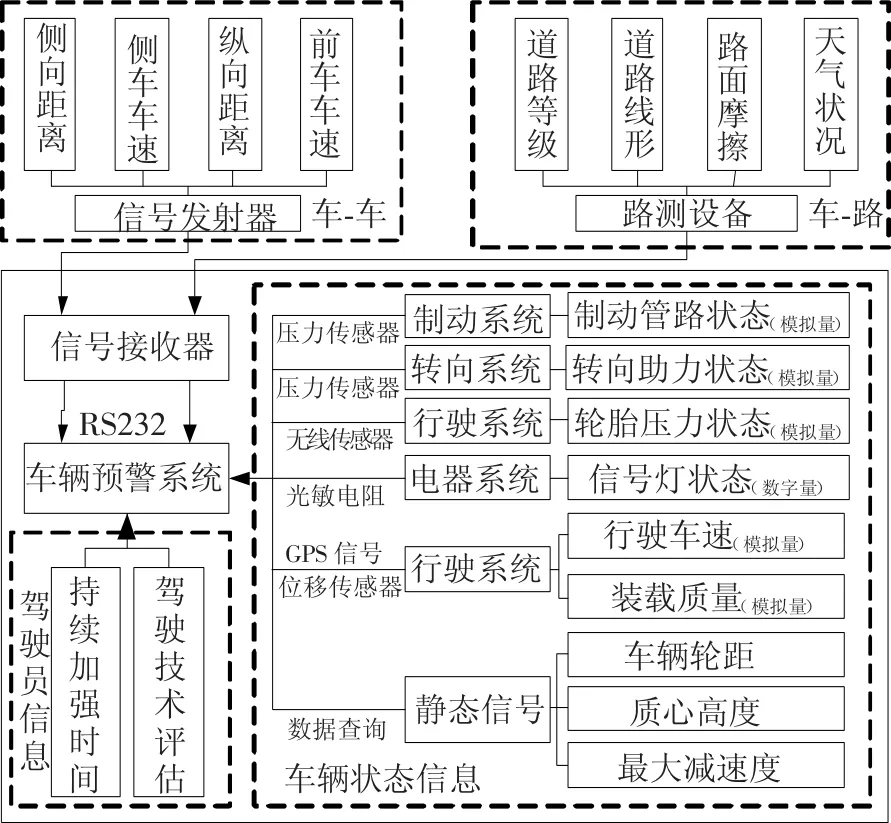
图1 车辆安全状态评价指标参数的获取方案
1.3 车辆安全状态评价体系建立
目前,针对动态车辆安全状态评价体系研究不足,尚未形成统一的标准.根据表1本文建立的车辆安全状态评价体系如图2所示.

图2 车辆安全状态评价体系
2 车辆安全状态模糊综合评价模型
车辆行驶状态分为直线跟车行驶和转弯行驶2种,基于模糊综合评判理论分别建立其安全状态评价模型.
2.1 模糊综合评判理论
运用模糊综合评判理论建立模糊综合评价方法数学模型的基本步骤[6]:1)明确评价模型的目标层O,准则层的因素集U={u1,u2,…,um}和方案层的评价集V={v1,v2,…,vn};2)建立关于因素集U的权重集 ω={ω1,ω2,…,ωi…ωm},ωi为因素ui的权重系数;3)构建模糊评判矩阵,因素集的因素i关于评判集V的模糊评判向量Ri={ri1,ri2,…,rin},则有模糊评判矩阵R=(rij)m×n,表示因素集U和评价集V的对应关系;4)依据模糊算子B=ω·R对评价模型的目标层O进行评价.
2.2 确定因素集
选用CA1046L2载货汽车作为试验车,基于车辆安全状态影响因素分析结果,分别对车辆直线跟车和转弯行驶时的安全状态进行分析.车辆直线跟车行驶安全状态评价指标包括P1、A3、A4、A5、A6、P6、P8共7个因素,则其评价模型准则层的因素集U={u1,u2,…,u7};车辆转弯行驶安全状态的评价指标包括P1、A3、A4、A5、A6、P7、P8共7个因素,则其评价模型准则层的因素集U={u'1,u'2,…,u'7}.
2.3 因素集的权重计算
以吉林省的安二公路为试验路段,对其交通事故原因进行统计分析[7],参照文献[8]中1~9评判标度准则,对车辆安全状态评价指标进行对比分析,计算车辆不同运行工况下评价指标因素集的判断矩阵.
直线跟车车辆安全状态评价指标判断矩阵A表示为

弯道行驶车辆安全状态评价指标判断矩阵A'表示为

按规范列平均法计算判断矩阵A、A'各行元素的算术平均值并进行归一化处理得ω和ω'.

判断矩阵A,A'的最大特征值分别为λmax=7.258和λ'max=7.136.对判断矩阵A,A'分别进行一致性检验,CⅠ、CⅠ'分别如式(1)、(2)所示.
RⅠ为判断矩阵平均随机的一致性指标[9],对于1~9阶的判断矩阵的RⅠ分别为0、0、0.58、0.9、1.12、1.24、1.32、1.41、1.45.
判断矩阵A、A'的随机一致性比率CR、CR'如式(3)、(4)所示.

根据判断准则可知,判断矩阵A、A'的不一致程度可以接受,准则层的因素集的权重向量分别为ω和ω'.
2.4 确定评价集
采用5级分类模式确定车辆安全状态评价集,则V={v1,v2,v3,v4,v5}={非常安全,安全,基本安全,轻度危险,危险}.
2.4.1 驾驶员安全度评价
驾驶员安全度评价指标包括驾驶疲劳度和驾驶技术水平.驾驶员疲劳度是指驾驶员的生理和心理负荷水平增大致使驾驶能力下降,利用生理记录仪对驾驶员连续驾驶的疲劳状态进行试验分析,驾驶疲劳度和连续驾驶时间之间呈现一种U型效应[10],如图3所示.
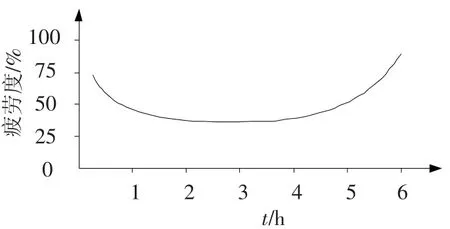
图3 疲劳度随时间的U形效应
驾驶技术水平评估由相关车辆管理部门完成,属于静态信息.本文确定的驾驶员安全度等于驾驶水平等级乘以疲劳程度.
2.4.2车辆安全度评价
本文基于多传感器数据采集技术设计开发的车辆安全状态实时动态监测预警系统,如图4所示,系统实时动态获取车辆行驶过程中状态参数.结合汽车运用工程的相关背景知识和机动车运行安全技术条件,确定CA1046L2载货汽车运行状态A3、A4、A5、A6、P8安全状态评价等级的评价指标阈值[11].

图4 车辆运行状态监测平台
2.4.3 跟车车距的安全度
车辆直线跟车行驶的临界安全距离l'[12]为

其中:Va为引导车速度;Vb为跟车车速;Vr为引导车和跟车的相对车速,Vr=Vb-Va;amax为车辆最大减速度;l为前后车的相对距离.
车辆直线跟车行驶车距安全度S1为

2.4.4 转弯车速的安全度
车辆转弯行驶过程中的危险状态表现为侧滑和侧翻[13].当车辆处于侧滑临界状态时,其侧向惯性力FG方向与其侧向加速度的方向相反,有

当汽车处于侧翻临界状态时,根据达朗伯原理,有

其中:FG为侧向惯性力;m为车辆总质量;r为转弯半径;b为轮距;h为车辆质心高度;μ为路面摩擦系数.
分析可得:1)当b/(2h)>μ时,汽车首先发生侧滑;2)当b/(2h)<μ时,汽车首先发生侧翻.
定义的车辆转弯限速安全度为S2,则

基于对驾驶员安全度、车辆运行状态参数安全状态评价阈值、直线跟车行驶纵向车距安全度和转弯车速的安全度的分析结果,得试验车安全状态评价因素集的评价指标,如表2.其中,驾驶员安全度S等于驾驶水平等级乘以疲劳程度,制动管路压力p1的隶属度函数为岭型函数,转向助力压力p2的隶属度函数为岭型函数,轮胎压力p3的隶属度函数为标准正态分布,电器系统中信号灯故障状态开关量D,车辆直线跟车行驶纵向车距安全度S1,车辆转弯行驶车速的安全度S2,侧向安全距离d隶属度函数为阶跃函数.

表2 车辆因素评价指标
2.5 结果分析
根据方案层的评价集和因素评价指标,对准则层的因素集进行分析评价,得模糊评判矩阵R.

利用准则层的因素集的权向量和模糊评判矩阵R计算得车辆安全状态模糊评价集B=ω·R=[b1,b2,b3,b4,b5].设定模糊评价集中各因素的秩构成的向量等于{1,2,3,4,5},即V={v1,v2,v3,v4,v5}={1,2,3,4,5},利用加权平均原则计算得车辆安全状态模糊评价集B的最大隶属度b为

按照最大“贴近度”原则,根据车辆安全状态最大隶属度b,可得出车辆不同运行状态下的综合安全状态.
3 结论
1)针对动态车辆安全评价指标参数多源、异构和动态的特点,将车辆安全状态影响因素分为驾驶员因素、车辆因素、车车因素和车路因素,分析了基于车路协同和多传感器数据采集技术的动态车辆安全状态评价指标参数采集方案.
2)基于动态车辆安全状态影响因素分类分析结果,构建了包括驾驶员、车辆和在途状态影响因素的车辆安全状态评价体系.将车辆行驶状态分为直线跟车和转弯行驶2类,基于模糊综合评判理论分别建立了车辆直线跟车和转弯行驶的安全状态评价模型.
3)将模型嵌入设计开发的车辆监测预警系统中,实现车辆行驶过程中安全状态的实时动态地分析评价,为动态车辆安全状态评价提供了一种新方法.
[1]郭孜政,陈崇双,王欣.基于贝叶斯判别的驾驶行为危险状态辨识[J].西南交通大学学报,2009,44(5):772-776.
[2]艾力·斯木吐拉,李鑫.基于模糊综合评判模型的沙漠环境下驾驶员安全特性评价[J].交通运输工程学报,2009,9(2):120-126.
[3]郭忠印,方守恩.道路安全工程[M].北京:人民交通出版社,2004.
[4]UEKI J,TASAKA S,HATTA Y.Vehicular collision avoidance support system(VCASS)by inter-vehicle communications for advanced ITS[J].IEICE Transactions on Fundamentals of Electronics,Communications and Computer Sciences,2009,E88-A:1816-1823.
[5]ANGELOS A,KATIA P,SOMYA J.Driver-vehicle-environment monitoring for on-board driver support systems:lessons learned from design and implementation[J].Applied ergonomics,2010,41(2):225-235.
[6]WANG Shunsheng,FEI Liangjun,HAN Yuping,et al.Fuzzy comprehensive evaluation of water level in the WEI river based on multi-objective and multi-level decision making method[C]//Proceedings of 2010 International Conferenceon Computer and Communication TechnologiesinAgricultureEngineering.Chengdu:IITA,488-491.
[7]杨志发.高等级公路景观对行车安全影响的综合评价与仿真[D].长春:吉林大学,2007.
[8]王春磊,吴云刚,隗锦涛.模糊综合评判法在泥石流危险度评价中的应用[J].安全与环境工程,2010,17(3):13-17.
[9]SAATY T L.Fundamentals of decision making and priority theory[M].Pittsburgh:RWS Publications,2000.
[10]PATEL M,LAL S K L,KAVANAGH D,et al.Applying neural network analysis on heart rate variability data to assess driver fatigue[J].Expert Systems with Applications,2011,38(6):7235-7242.
[11]GB 7258—2004.机动车安全运行技术条件[S].北京:国家质量监督检验检疫总局,2004.
[12]顾柏园.基于单目视觉的安全车距预警系统研究[D].长春:吉林大学,2006.
[13]黄勇,蒋工亮,孙联.基于图像处理技术的高速公路弯道车速预警系统的研究[J].山东交通学院学报,2009,17(4):23-27.
