基于DoDAF的空间机器人作战视图研究
2012-09-02王英,陈勇
王 英,陈 勇
(装备学院,北京 101416)
空间机器人是由具有快速轨道机动能力的平台和对空间目标进行操作的机械臂构成,同时还携带有多种传感器载荷。由于空间机器人具有快速轨道机动能力和机械臂灵巧操作能力,因此空间机器人能够完成多种在轨任务[1],同时也能执行多种作战任务,具有很高的应用价值。
本文以美国国防部颁发的体系结构框架(DoDAF)标准[2-3]作为系统工程的分析方法,以空间机器人在轨服务为背景,通过建立空间机器人的作战活动模型对其在轨服务任务进行了相关分析描述,在SA软件开发平台支持下,采用基于活动的快速架构分析方法——ABM 方法,建立了空间机器人在轨服务活动作战视图。
1 体系结构建模简介
美国国防体系结构框架 DoDAF,提供了开发和表述体系结构的规则、指南和产品描述,是开发体系结构的前提条件。DoDAF由C4ISR AF1.0演进而来,先后经历了C4ISR AF2.0、DoDAF 1.0,发展到现在的DoDAF 2.0。DoDAF是当今应用最为广泛和最为成熟的体系结构框架[4]。
DoDAF体系框架提出了体系结构的4个视图:全景视图(AV)、作战视图(OV)、系统视图(SV)和技术视图(TV)和 29个产品[5-6]构成了一套集成系统体系结构描述规范。
本文以研究在轨服务作战活动为核心,对在轨服务流程进行了建模,具体建模步骤和应用到的视图产品及其描述如表1所示。
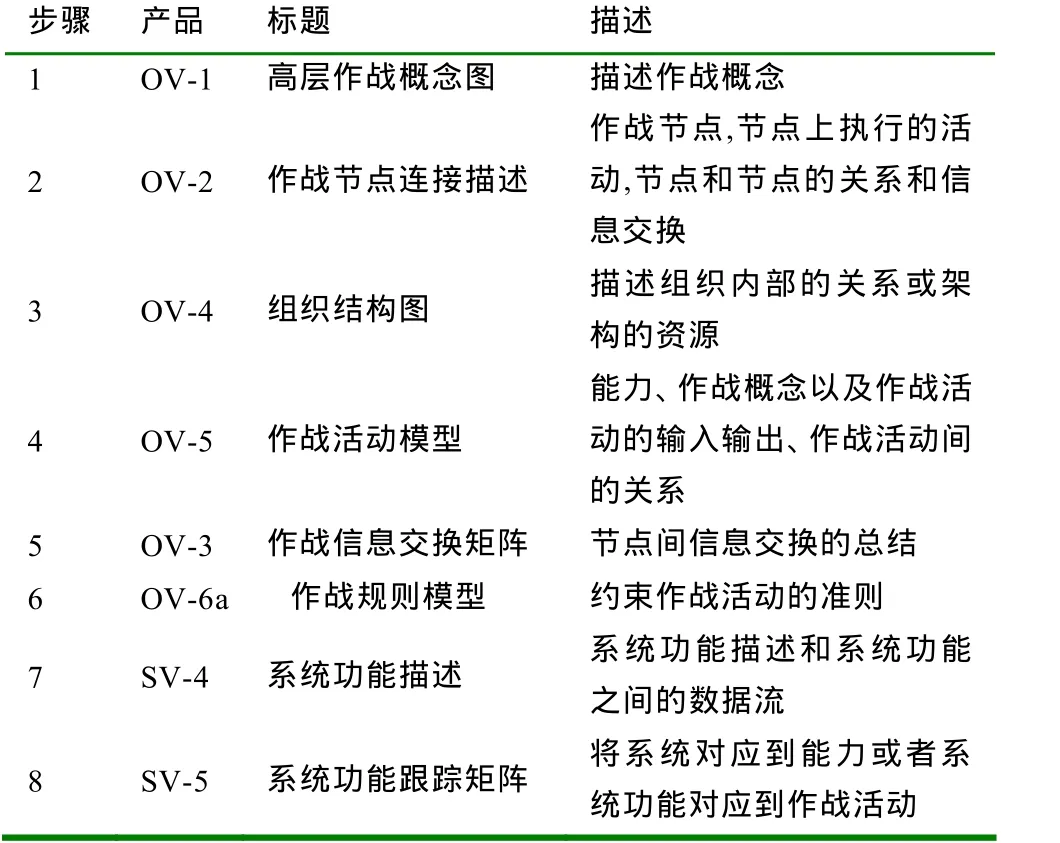
表1 建模步骤及其视图产品
2 空间机器人在轨服务体系结构建模
空间机器人在执行自主对接、燃料加注、抓捕目标、模块更换、拖拽、在轨维修等任务时,完成任务的场景如下:接收到司令部作战活动指令后,空间机器人在接收到目标飞行器实时轨道数据后,进行轨道机动,转移到目标飞行器附近,在机械臂的辅助操作下与目标飞行器交会对接,然后通过机械臂的关节角转动控制实现对目标飞行器的抓捕等操作,最后将任务完成信息反馈回指控中心。
1)高层作战概念图OV-1
OV-1描述了空间机器人完成对目标飞行器的操作任务,给出了作战活动的各个单元的关系,如图1所示。高层作战概念图 OV-1描述了在轨服务活动的单元组成、突出任务节点间的相互关系[7]。
2)作战节点关联描述
OV-2是描述作战节点和这些作战节点的需求线的一个产品。整个任务过程中的节点分为:司令部、目标监视系统、地面测控中心、平台任务控制系统、轨控分系统、姿态控制分系统和机械臂,这些单元协同在一起,共同完成在轨任务。图2所示就是节点连接图。

图1 空间机器人高层作战活动图
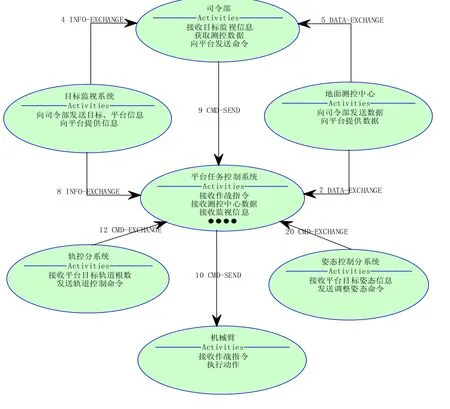
图2 作战活动节点连接图OV-2
3)组织关系图
OV-4描述在体系结构中起关键作用的任务单元或任务组织之间的关系,如图3所示。
4)作战活动模型
OV-5是关键的体系结构产品,描述为了完成任务或者达到目标需要执行的一系列活动,由能力、作战活动、活动间的输入输出流等建模元素构成[8]。OV-5的两种关系必须要体现:一种是层次关系,即作战活动具有子活动,另一种就是信息流关系,如图4所示。

图3 组织结构图OV-4

图4 作战动节点树OV-5
A.0描述了空间机器人在轨服务所需外部其他系统的支持和所受的约束,灰色框代表其他系统的作战支持,如图5所示。

图5 空间机器人作战活动顶层活动模型
将顶层活动A.0分解为任务准备、任务支持、任务规划和效果反馈四个子活动。活动与活动间的箭头分别表示了该活动所具备的条件、所需的数据信息(输入)、执行活动的平台和活动的执行结果(输出)等,如图6所示。
5)信息交换矩阵
OV-3通过确定哪些作战活动,交换什么资源,同谁交换,为什么交换这些资源是必要的以及有关资源的属性,详细描述了资源流的交换,如表2所示。
6)作战规则模型
作战规则模型OV-6a描述了空间机器人执行作战任务时所需要遵循的约束规则,即作战活动进入下一节点需满足的条件。对于空间机器人作战任务而言,只有当服务指令和目标、平台的实时轨道数据等信息都传递到平台指控中心时,才能进行轨道转移,与目标交会,对机械臂进行运动规划。具体规则模型如图7所示。

图6 空间机器人作战活动次级活动模型
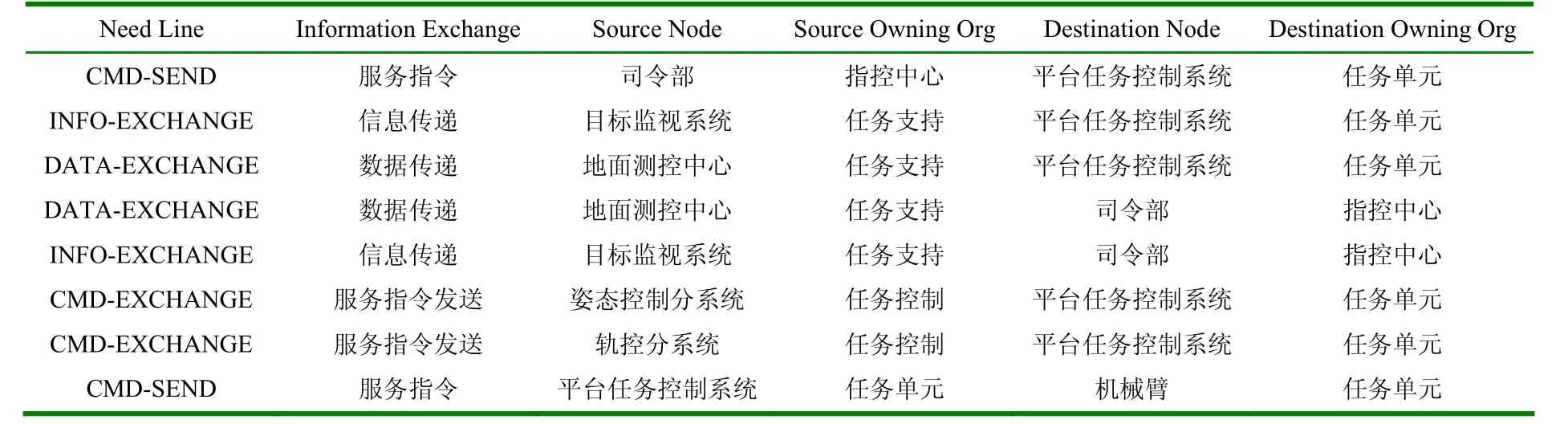
表2 信息交换矩阵OV-3
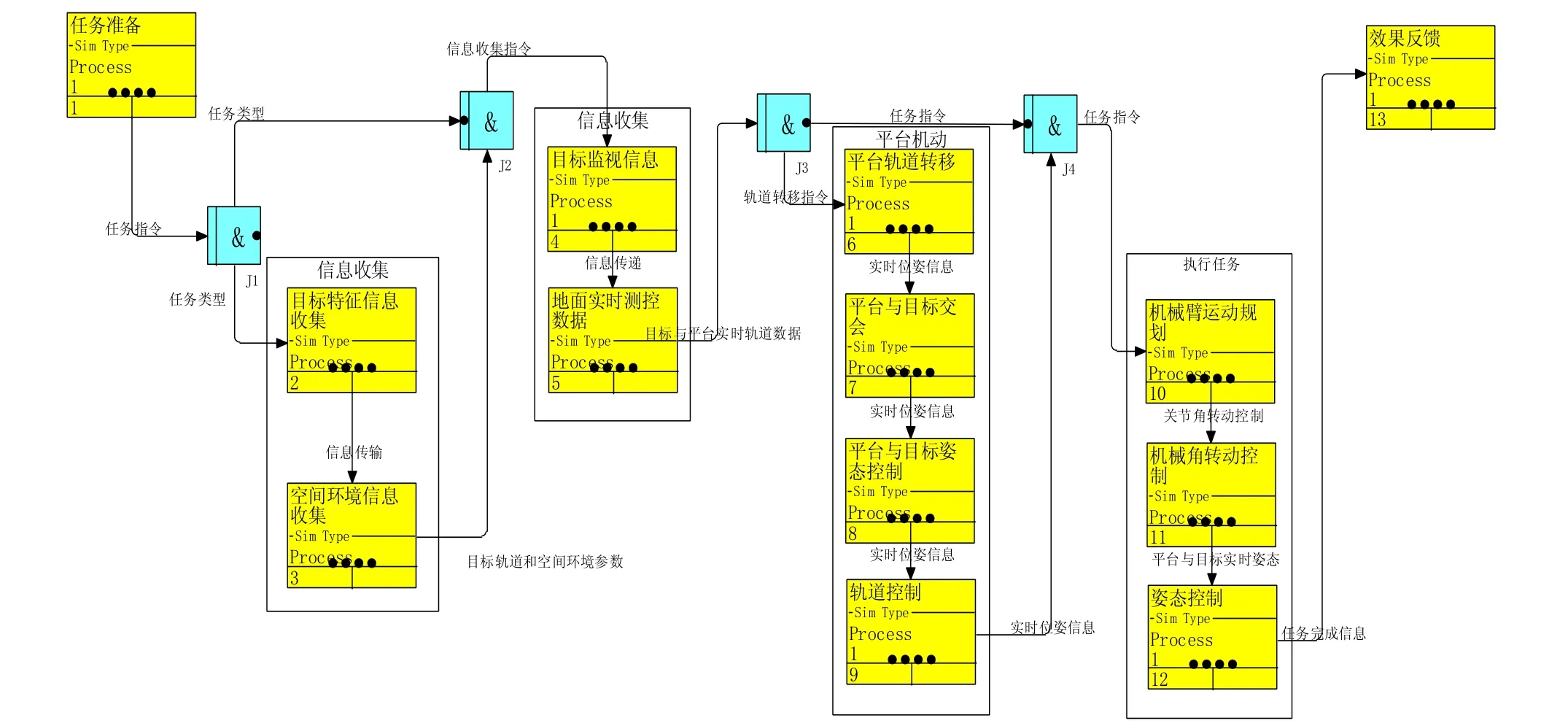
图7 作战规则模型OV-6a
7)系统功能描述图
系统功能描述图SV-4描述系统功能结构和系统功能之间的数据流。建立系统功能描述图的主要目的是对系统的数据流和输入输出有一个清楚的描述,如图8所示。

图8 在轨服务系统功能图SV-4
3 建立系统功能跟踪矩阵
SV-5系统功能跟踪矩阵将系统对应的能力或者系统功能对应到作战活动[9]。作战活动从OV-5中的叶子活动获得,系统功能从SV-4中获得,将空间机器人作战任务作战活动和系统功能关联起来,形成二维关系如表3所示。通过SV-5映射系统功能和作战活动的关系,将作战体系结构模型和系统体系结构模型联系起来。

表3 系统功能跟踪矩阵SV-5
4 结束语
本文利用 DoDAF标准对空间机器人的在轨服务进行了建模,建立了高层作战活动图 OV-1、作战活动节点连接图OV-2、组织结构图OV-4、作战活动模型OV-5、作战活动信息交换矩阵OV-3、作战规则模型OV-6a、作战活动系统功能图SV-4和系统功能跟踪矩阵 SV-5,有效地分析了空间机器人在轨服务的任务流程,对空间机器人在轨服务仿真开发和实际应用系统构建的细致研究具有应用价值。
[1]崔乃刚,王平,郭继峰,等. 空间在轨服务技术发展综述[J].宇航学报,2007,28(4):805-811.
[2]DoD Architecture Framework Working Group,DoD Architecture Framework Version 1.0,Volume I:Definitions and Guideliness[R].The United States:Department of Defense,2004.
[3]DoD Architecture Framework Working Group,DoD Architecture Framework Version 1.0,Volume II:Product Descriptions[R].The United States:Department of Defense,2004.
[4]史建伟,蔡远文,邢晓辰.基于DoDAF的在轨维护与服务系统需求分析[J].航天控制,2011,29(4):88-93.
[5]赵煦,梁涛.基于活动方法论的复杂系统体系结构建模[J].科学技术与工程,2010,10(33):8277-8281.
[6]熊生龙,陈春,倪庆华.基于UML的系统视图描述[J].舰船电子工程2009,29(6):38-42.
[7]李鼎,曲爱华.基于活动的系统作战需求分析方法[J].指挥控制与仿真,2009,31(6):19-22.
[8]刘钢,李赟,老松杨,等.基于DoDAF的编队导弹航路规划体系结构建模[J].火力与指挥控制,2011,36(4):26-29.
[9]姚勇,李智.基于DoDAF的C2BMC系统作战视图研究[J].装备指挥技术学院学报,2011,22(3):76-81.
