单立柱堆垛机的机械结构及控制系统设计
2012-08-31龚秋生刘文波
龚秋生,刘文波
(沈阳理工大学,辽宁 沈阳 110168)
自动化立体仓库,是一个典型的高技术密集型的机电一体化产品,已经逐渐取代传统的普通式仓储,成为物流仓储的主流产品,而堆垛机是自动化立体仓库中最重要的搬运设备,本文主要探讨单立柱项道堆垛机的结构和控制系统设计。
1 堆垛机的机械结构设计
堆垛机在自动化立体仓库中承担着入库、出库和盘库等重要的搬运任务,其机械结构主要有:行走机构、立柱、提升机构、载货台、伸缩货叉和电气控制设备等组成。其结构如图1 所示。
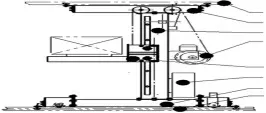
图1 堆垛机结构图
1.1 行走机构
行走机构由伺服电机、减速器、行走轮、导向轮和上、下横梁等组成。其工作原理为:行走轮在伺服电机和减速器驱动下,在上、下横梁两侧的导向轮的作用下,沿着地轨实现堆垛机的水平行走。其中,上横梁的导向轮不仅起到水平导向作用,还起到整体框架的侧面支撑作用,防止堆垛机倾倒。
1.2 立柱
立柱是堆垛机的主要支撑部分,连接着上横梁和行走机构,同时立柱上附加安装有导轨,其对载货台的升降起到准确的引导作用。
1.3 提升机构
该机构由驱动电机、卷扬机、钢丝绳和滑轮组等组成,能很好提升载货台及货物,并能实现准确的垂直定位。
1.4 载货台
载货台是堆垛机支撑货叉和货物的部分,该部分在钢丝绳的作用下沿着立柱导轨垂直运动,实现立体库层货格的定位。
1.5 伸缩货叉
伸缩货叉是堆垛机自动存取货物的重要部分,该部分主要由货叉驱动电机、链轮、驱动链条及货叉本体组成。其主要的工作原理为:由货叉电机驱动链轮,链条为动力输入轴提供动力,经过齿轮和齿条的啮合实现上叉、中叉和下叉的三级差动传动,使货叉自动伸缩,实现货物的存取。货叉本体的结构如图2 所示。
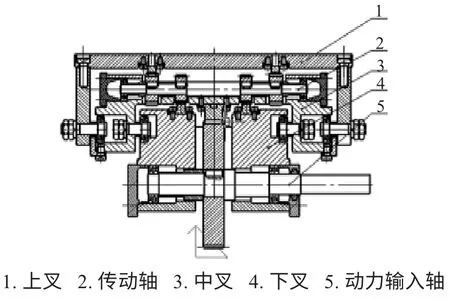
图2 货叉结构图
1.6 安全性措施
堆垛机是一种典型的自动化产品,在上位机的控制下对立体库中的货物实现自动存取,其安全性就显得尤为重要。具体表现如下:
(1)在提升机构上设计了机械防坠落装置:在提升机构钢丝绳发生断裂时该机械结构会把载货台锁死在立柱上,实现机械自锁,防止载货台及货叉坠落,造成不必要的人员和财力损失。
(2)在导轨的两端都设置有减速点和硬件限位,并且在导轨终端安装有机械挡块,防止堆垛机在水平行走过程中脱轨。另外,在立柱的上端和货叉的两端也分别安装有限位开关,同时运用软限位,双重保护确保堆垛机在允许的范围内运动。
(3)在货叉上设置左右驱动开关来控制货叉的伸缩方向,同时还设有上电保护,在确认货叉已经收回的情况下,堆垛机才会运行,避免货叉没有收回而跟货架产生碰撞。
2 堆垛机的控制系统
2.1 堆垛机的控制功能和控制要求
为了完成立体库的入库、出口和盘库等功用,堆垛机必须具有手动和自动控制两种控制方式,必须具备水平行走、垂直提升和货叉的左右伸缩等功能,同时要求其定位精度为:±3mm,水平行走速度为:10 m/min,垂直提升速度为:10 m/min,货叉伸缩速度为:21 m/min。
2.2 控制系统结构
为了实现堆垛机的控制功能和控制要求,采用图3 的控制系统结构:
图3 控制系统结构图
该控制系统以S7-200 PLC 为控制核心,通过无线数据传输系统实现其跟上位机和触摸屏的数据交流,根据数据指令驱动相应机构的控制模块,实现该机构的动作。在水平行走方向采用伺服控制器+伺服电机控制方式,在垂直提升和货叉伸缩方面采用变频器+异步电动机控制方式。
2.3 PLC 选型及I/O 口扩展
由于PLC 具有抗干扰能力强,可靠性极高、控制功能强和编程、使用、维护方便等特点,选用PLC 作为控制核心,并且S7-200 系列PLC 价格低廉,结构小巧可靠性高,运行速度快,编程指令极丰富,具有强大的多种集成功能和实时性,性价比高并能满足我们控制的要求,所以选择其作为控制核心,并选择CPU226 作为主机控制单元。由于CPU226 本身具有24 输入/16 输出共40个数字量I/O 点,并不能满足控制要求,所以运用S7-200 系列PLC 的数字量扩展功能,分别增加1个EM221 数字量输入扩展模板和1个EM223 数字量混合输入输出扩展模板。
2.4 位置控制
堆垛机在空间有3个自由度,即水平行走、垂直提升和货叉的伸缩,以实现立体库货物的存、取和搬运的功能。本系统选用了三菱伺服控制系统,驱动水平行走机构,实现水平运动的速度控制,通过安装在堆垛机底部的U 型认址传感器检测货架上安装的认址片实现堆垛机最终的水平位移控制,配以电机本身的电磁抱闸实现准确的水平定位。选用MM440 变频器+三相异步电动机控制方式,运用变频调速方式控制三相异步电动机的速度,通过安装在垂直提升机构上的U 型认址传感器检测垂直方向的认址片实现层的寻址,附加三相异步电动机本身携带的电磁抱闸功能,实现堆垛机垂直方向准确定位。货叉的伸缩控制跟垂直提升原理很像,只是运用接近开关来确定货叉是否到达指定位置。
3 结束语
本文对单立柱堆垛机的机械结构和控制方案进行了设计,该堆垛机经安装调试后运行平稳、可靠,满足了学校物流实验中心的要求,并且能为各高校和中小型企业建设自动化仓库提供技术参考。
[1]李 辉,肖宝兴,李宏伟. S7-200PLC 编程原理与工程实训[M].北京:北京航空航天大学出版社,2008.
[2]陈白宁,段智敏,刘文波.机电传动控制基础[M].辽宁:东北大学出版社,2008.
[3]洪镇南.PLC 网络在自动化立体仓库堆垛机上的应用[J].工业控制计算机,2002,15(5):55-56.
[4]赵迎春. 基于PLC 的立体仓库控制系统[J]. 物流工程与管理,2009,31(1):40-41