铲斗连杆机构的参数优化设计
2012-08-31李志杰温全明
李志杰,朱 林,温全明
(广西科技大学(筹)机械工程学院,广西 柳州 545006)
液压挖掘机的挖掘方式一般分为铲斗挖掘、斗杆挖掘以及复合挖掘。在挖掘比较松软的土质时,为了节约油耗,一般采用铲斗挖掘的方式,因此,设计过程中就要尽可能的提高铲斗挖掘力。要提高液压挖掘机的铲斗挖掘力,就要对连杆机构进行优化设计,在保证不影响液压挖掘机性能的情况下,利用ADAMS 的参数优化功能对连杆机构的传动比进行优化设计,增大传动比,从而提高铲斗挖掘力。
1 液压挖掘机铲斗挖掘力分析
铲斗连杆机构如图1 所示,AB 是液压挖掘机的摇杆,AE 是连杆。液压挖掘机铲斗理论挖掘力是由铲斗油缸和连杆机构的传动比i 决定的,在不考虑自重、外载、液压系统等影响因素下,铲斗理论挖掘力FW的计算公式为:

式中,
FW为铲斗挖掘力;
i 为连杆机构传动比;
Pb为铲斗液压油缸工力;
A 为铲斗液压油缸大腔作用面积;
R1为铰点B 对铲斗油缸的作用力臂;
R2为铰点B 对连杆AE 的作用力臂;
R3为铰点C 对连杆AE 的作用力臂;
LCD铲斗长度。
搜完,毫无结果。警官虎着脸沉默片刻,目光在那四名女学生身上游走。虽说是冬天,女学生仍是纤纤巧巧,柳腰生姿。
由上式可知,在液压油缸的推力不变的情况下FW与传动比i 成正比,只要提高传动比就可以提高铲斗挖掘力。

图1 铲斗连杆机构
2 铲斗连杆机构参数化建模
首先对铲斗连杆机构进行必要的简化,如图2所示。

图2 铲斗连杆机构简化模型图
由图形可知,模型简化为一个平面四连杆结构,三角形GCF 为斗杆简化图形,三角形CDE 为铲斗简化图形,杆l4为铲斗油缸,l5为摇杆,l6为连杆,R1、R2、R3为上述介绍的作用力臂。用ADAMS/View 中的建模工具建立液压挖掘机铲斗连杆机构的模型,分别把A、B、C、E 四个铰点做为设计变量:DV_1~DV_8,其中DV_1﹑DV_2 是B 铰点的横坐标和纵坐标;DV_3﹑DV_4 是C 铰点的横纵坐标;DV_5﹑DV_6 是A 铰点的横纵坐标;DV_7﹑DV_8 是E 铰点的横纵坐标。然后对模型添加约束,为保证自由度为零且没有沉余约束, 需要添加3个旋转副﹑3个球面副﹑1个移动副﹑1个固定副,再对液压铲斗油缸添加驱动,并且对驱动建立STEP 函数,使液压油缸在仿真过程当中由全缩状态伸长为全伸状态,最后ADAMS/View 中建立铲斗连杆机构简化模型如图3 所示。
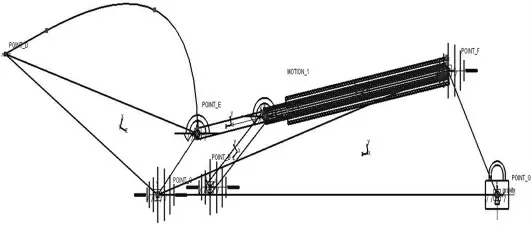
图3 ADAMS 建立简化连杆模型
3 铲斗连杆机构的优化
在进行参数化分析时,需要建立相应的目标函数,本次优化设计中,把铲斗连杆机构的传动比作为优化目标函数。

由目标函数可知,要对传动比进行优化设计,就要对R1、R2、R3分别建立测量,由于液压挖掘机在仿真过程当中作用力臂R1、R2、R3一直在变化,所以我们利用三角形的面积关系导出作用力臂的表达式。
在三角形FBA 中,利用ADAMS 的Measure 功能分别建立测量函数:
FUNCTION_MEA_BA;
FUNCTION_MEA_BF;
MEA_PT2PT_FA。
通过仿真得到3个测量函数的测量曲线变化情况,其中函数MEA_PT2PT_FA 的测量曲线如图4所示。
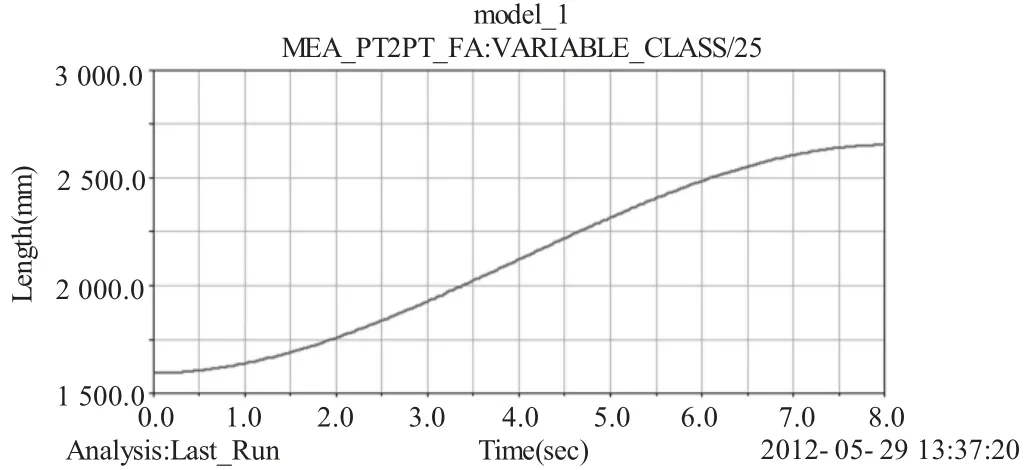
图4 油缸长度的测量曲线MEA_PT2PT_FA
由于知道了三角形FBA 中三个边的变化情况,利用海伦公式:

其中,S 为三角形FBA 的面积;
P=(A+B+C)/2;
A、B、C 分 别 是 FUNCTION_MEA_BA、FUNCTION_MEA_BF、MEA_PT2PT_FA。
令:

由公式(3)、(4)可推导出R1的测量函数,通过仿真得到了R1的测量曲线,如图5 所示。
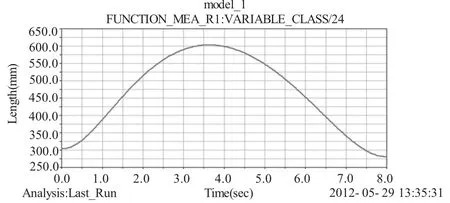
图5 R1 的测量曲线FUNCTION_MEA_R1
同理,R2、R3的测量曲线也是以上方法获得,由R1、R2、R3的测量函数可知i 的测量曲线如图6 所示。
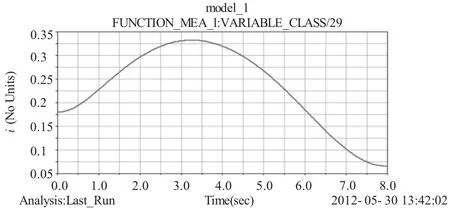
图6 i 的测量曲线FUNCTION_MEA_I
当测量目标函数的设计完成后,对约束条件进行定义。对于连杆机构来说,连杆机构的传动角不小于30°,液压油缸的传动角不小于10°,在此采用传感器功能来约束角度。首先建立测量角度∠FAB 以及∠AEC,然后建立传感器:SENSOR_1、SENSOR_2,传感器SENSOR_1 限制∠FAB 使得在运动过程中不小于10°,传感器SENSOR_2 使得∠AEC 在运动过程中不小于30°。完成上述工作以后就开始试验设计和优化计算,首先是设计研究,设计研究考虑一个设计变量的变化对样机性能的影响。以DV_3 为试验对象,DV_3 是铰点C 的横坐标,参数的变化范围定在标准值50 之间,仿真的结果如表1 所示。试验次数5 次,O1 为传动比大小,DV_3 为坐标值的变化,Sensitivity 表示相应坐标变化对传动比的影响程度。
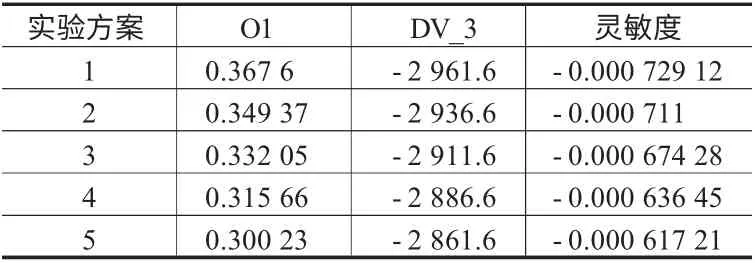
表1 DV_3 变化对传动比的影响
通过对DV_3 分析可以看到敏感程度的变化,分别对其他铰点的坐标进行分析,发现每个变量对目标函数都存在一定的影响,因此,将DV_1 至DV_8都进行优化,将仿真的设置都完成以后,就进行优化仿真分析,待仿真结束以后,系统提供仿真结果的信息查看窗口。
由于优化分析的目的在于提高传动比,首先关注传动比的提升情况,如图7 所示。

图7 传动比i 优化前﹑后曲线
传动比相比优化以前得到明显的提高,但是前提是要保证优化的变化不大的情况下,因此,我们提取优化前后铲斗油缸的变化曲线,如图8 所示。
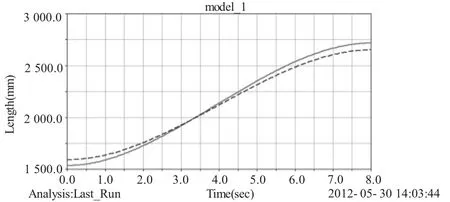
图8 优化前﹑后液压油缸长度对比
由以上图形可以看出,油缸的行程长度的变化最大不超过90 mm,变化很小,满足我们的要求,然后观察优化前后传动比与油缸行程长度之间关系,如图9 所示。
由以上3 组图形可知,在保证油缸变化不大的情况下,传动比由优化前的0.332 05 提高到了0.469 47,提高了41.4 %,而铰点的位置也发生了变化,如表2所示DV_1 至DV_8 铰点位置的变化情况。
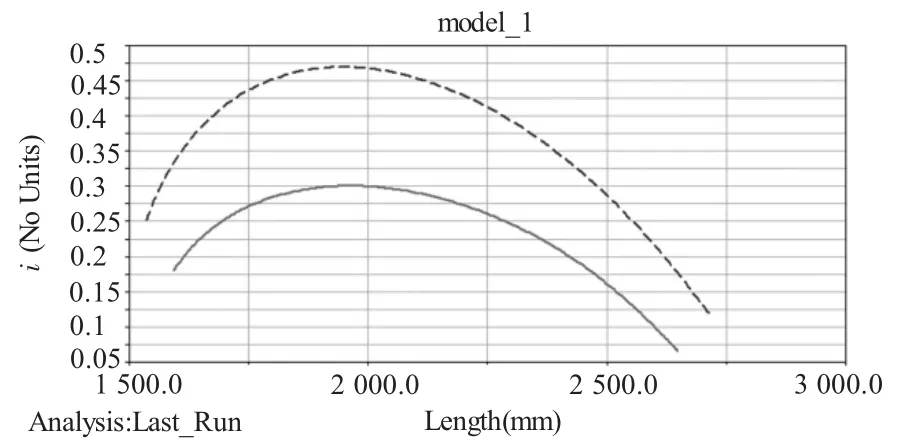
图9 优化前﹑后传动比随油缸长度变化

表2 优化前、后传动比与铰点的变化
由表格的数据可以看出铰点的位置都发生了的变化,但是变化的范围都不超过50 mm,在这种细小的位置变化的情况下却提升了41.4 %的传动比,可见优化效果不错。
4 结束语
本文利用ADAMS 虚拟样机技术,建立了铲斗连杆机构的参数化模型,在保证液压油缸行程长度变化很小的情况下,仿真过程中不断的变化铰点的坐标位置,最终获得最大传动比。由此可见,优化的结果对产品的后续改进设计具有一定的参考价值。
[1]郑家坤. 基于虚拟样机的挖掘机工作装置的设计与仿真[D].四川:西南交通大学,2008.
[2]林庆钻. 基于ADAMS 的液压挖掘机铲斗挖掘力优化与油缸动力学仿真分析[J].建筑机械,2012,(3):87-89.
[3]陈德民,槐创锋,张克涛. 2005/2007 虚拟样机技术[M]. 北京:化学工业出版社,2010.
[4]郭卫东.虚拟样机技术与ADAMS 应用实例教程[M]. 北京:北京航空航天大学出版社,2008.
[5]李兴华,胡 蓉.基于Matlab 的挖掘机工作装置传动比极值的计算[J].中国工程机械学报,2006,4(1):12-15.
