基于PLC控制系统的气动机械手设计
2012-08-29张晓辉李卫新
张晓辉,李卫新
(1.濮阳市锅炉压力容器检验所,河南 濮阳 457000;2.濮阳市质量技术监督检验测试中心,河南 濮阳 457000)
机械手是在机械化、自动化生产过程中发展起来的一种新型装置。近年来,随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高科技技术领域内迅速发展起来的一门新兴技术,这就更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
PLC 在工业生产过程自动控制领域得到了广泛的应用,具有结构简单、易于编程、性能优越、可靠性高、灵活通用等优点;气动技术也是实现自动化控制的重要手段之一,特别是在非污染行业占有重要的地位,气动技术中的压力介质来自于空气,环境污染小,容易实现控制工程。
1 工作原理
1.1 气动机械手组成
该气动机械手由步进电机、直线导轨、气缸、传感器、定位开关、行程开关、支架、机械零部件构成;控制系统由气动装置和PLC 控制系统组成。PLC 控制系统作为主控器,来控制整个机械手的运行,控制系统采用标准模块化设计,传感器作为反馈检测元件对PLC 提供信号控制气动装置中的电磁阀,从而达到控制机械手的上升、下降、旋转等动作。气动机械手结构示意图如图1 所示。

图1 气动机械手结构示意图
1.2 气动机械手工作过程
工作启动时,步进电机复位使机械手部分到达起始位置,升降气缸处于下部,手爪气缸伸出抓取物体,同时开始延时5 秒,保证手爪充分抓紧物体,延时结束后升降气缸连同物体一起上升,手爪气缸缩回;旋转气缸动作使气爪逆时针旋转90 度,步进电机转动使机械手部分到达指定位置,升降气缸上升,手爪气缸伸出到位后松开物体并延时5 秒,确保物体准确放置在物料台上;延时结束后手爪气缸缩回,复位到起始位置。此为一个工作循环。
2 气动控制回路设计
气动控制回路是本工作单元的执行机构,该执行机构的控制逻辑控制功能是由PLC 实现的。气动控制回路的工作原理见图2:B1、B2 为安装在推料气缸的两个极限工作位置的磁性传感器。1Y1、2Y1、3Y1、4Y1、4Y2 为控制气缸的电磁阀。

图2 气动控制回路原理图
气动机械手的回路设计主要由4个回路组成,控制机械手的升降、伸缩、抓紧与放松及旋转4个动作,分别由3个直动式气缸和1个旋转气缸组成。在气动回路设计过程中,通过三位五通的电磁换向阀控制换向,由于4个气缸先后动作,所以设计有中位。可以通过调节节流阀的节流口控制流量大小,从而控制气缸运动的速度。气动回路很容易实现自动控制,可以通过PLC 来控制换向阀实现自动换向。此外,气动回路可以适应任何恶劣环境,比较容易维护,因此在自动控制中应用越来越广泛。
3 PLC 控制系统的设计
在该系统中输人点数为10 点,输出点数为8点,考虑到控制要求和维修方便,采用了日本三菱公司生产的F X2N—48MT 型PLC 作为主控器。电磁铁供电电压为24VDC,直接与PLC 输出电路连接,使系统简单可靠。输入/输出外部接线图如图3 所示。

图3 PLC 外部接线图
经分析知,在一个工作循环过程中升降气缸需要动四次,如果采用“经验”编程方法,程序比较复杂而且易产生障碍信号,所以本文采用状态编程法来设计PLC 程序,状态编程的思想为:将一个复杂的控制过程分解为若干个工作状态,弄清各状态的工作细节,再根据总的控制顺序要求,将这些状态联系起来,形成状态转移图,进而编绘梯形图程序。采用这种方法,一个“状态”代表一个“工序”,程序简单直观,而且可以消除障碍信号。工作状态图如图4 所示,部分程序图如图5 所示。
4 结论
由三菱PLC 控制的气动机械手装置能够实现物料的自动搬运,可以实现连续、单周期和往复运动两次三种执行方式,充分利用了PLC 的人机交互性较强和程序利于编制、硬件设计简单等优点,实现生产线自动化的控制。

图4 工作状态图
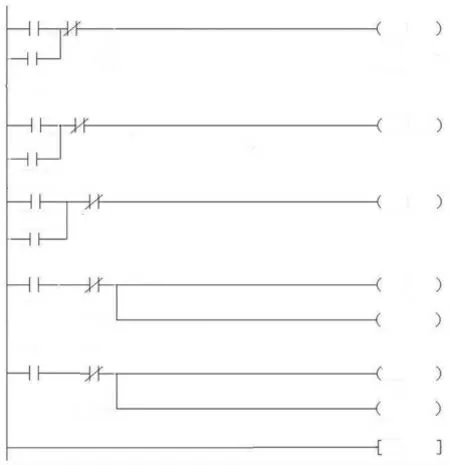
图5 部分程序图
[1]陈丽. PLC 控制系统编程与实现[M]. 北京:中国铁道出版社,2010.
[2]郭琼.PLC 应用技术[M].北京:机械工业出版社,2009.
[3]陈丽.PLC 编程应用基础[M].北京:机械工业出版社,2009.
[4]陈志权.基于PLC 气动机械手的控制系统[J].兵工自动化,2008,(4),83-84.
[5]王登贵.气动机械手控制系统的设计与实现[J].自动化技术与应用,2009,(8),66-68.
