人机工程研究在高速列车虚拟装配中的应用
2012-08-29熊晶,杨龙
熊 晶,杨 龙
(1.华中科技大学 机械科学与工程学院,湖北 武汉 430074;2.南车青岛四方机车车辆股份有限公司,山东 青岛 266111)
随着社会的进步与科学技术的日新月异,人们对生活和工作环境的要求越来越高。人机工程学理论逐渐渗透到产品设计及制造过程中,其研究与应用得到越来越广泛的关注。在人机工程学的研究中,“人—机—环境”系统,被视为一个统一的整体,对该系统整体进行研究和改善,使“人—机—环境”达到最佳匹配状态,以保证人安全、高效并舒适地工作、学习和生活。
目前,大型机械产品装配的自动化程度很低,其大部分的装配过程是靠手工完成的。那么,人机系统设计不合理、零件堆放位置不合理、操作者的动作不符合动作经济原则等因素,都会影响工人的身体健康及企业的生产效率。
此外,传统的人机工程学分析评价是在工人已经出现不适或职业伤害已经发生的前提下进行的,而理想的人机工程学分析评价方法,应当尽可能在伤害发生之前,就能分析判断其可能发生的情况。
因此,越来越多的企业选择在虚拟环境中,进行人机工程学分析评价。通过在计算机上创建近乎实际的虚拟环境,用虚拟产品代替传统设计中的物理样机,能够方便地对产品的装配过程进行模拟与分析。在产品的虚拟装配中引入人的因素,并分析人在工作时的舒适度以及人对工作负荷的适应能力,以便及时消除无效劳动,减轻疲劳,合理利用人力和设备,提高工效。
对产品虚拟装配过程进行人机工程分析时,要考虑以下问题:
(1)不同的人机工程问题,应采取何种分析方法;
(2)分析结果是否符合实际;
(3)采取改善措施后,人机工程问题是否确有改善。
针对这些问题,本文旨在职业伤害发生前,有效地判断伤害发生的原因,并及时改善。为此,在DELMIA 软件的Human Task Simulation 模块中,模拟产品装配过程,并在Human Activity Analysis 模块中,对人体的状态进行分析,验证分析结果的可靠性,最终实现在虚拟环境下完成人机分析及改善。
1 舒适度及抬举劳动强度分析方法
1.1 舒适度分析
作业空间狭小或作业位置的特殊要求,会造成工人装配操作舒适度降低,引发身体不适。DELMIA的Human Activity Analysis 模块,提供了一种人体舒适度分析工具RULA(Rapid Upper Limb Assessment),RULA 分析通过对工人的某个整体姿态以及身体各部位姿态打分,从而判断该姿势是否可以被接受。RULA 分析整体得分情况如表1,身体各部分得分情况及对应的颜色如表2。
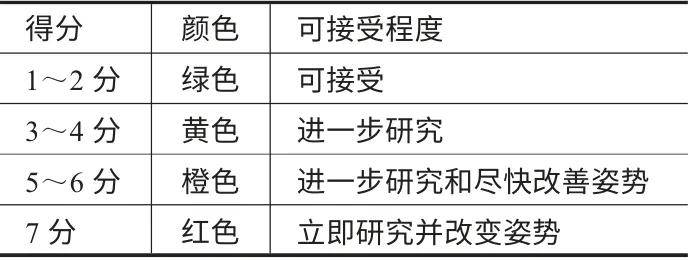
表1 RULA 分析整体得分含义表
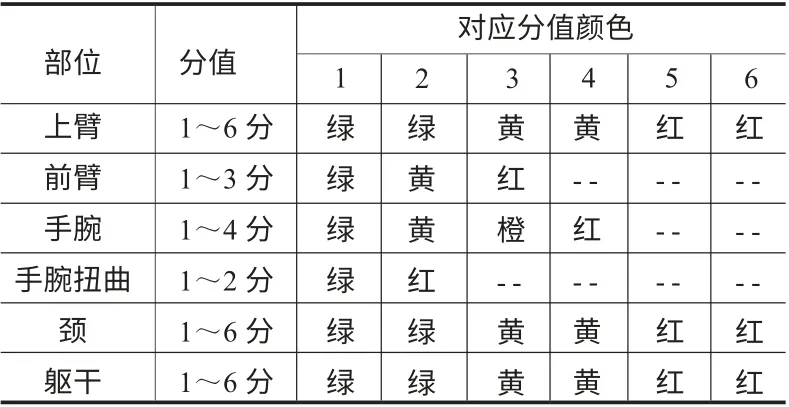
表2 身体各部位得分范围[1]
1.2 劳动强度分析
劳动强度是指生产过程中的繁重和紧张程度,也是劳动力消耗的密集程度。DELMIA 的Human Activity Analysis 模块,提供了抬举劳动强度分析、推拉劳动强度分析、搬运劳动强度分析等工具,以用于不同装配作业人机劳动强度分析的要求。
NIOSH 理论是American National Institute for Occupational Safety and Health 机构发表的人体双手提举分析理论,用于分析操作过程中双手抓举任务[2]。目前,有两套分析评价方法:NIOSH81 和NIOSH91,分别用于分析人体双手对称提举负荷问题与双手不对称提举的问题。运用NIOSH 理论对人体双手提举进行分析,旨在减少与手工操作相关的腰痛或者别的肌肉骨骼紊乱,同时满足生物力学极限、生理学极限以及心理学极限。
(1)进行NIOSH 分析需要输入的参数。在DELMIA 的环境下,对人体进行NIOSH 分析时,需要输入的参数有:
一是提举开始与提举结束时的人体姿态;
二是提举频率及持续时间;
三是提举负荷物时人体的舒适度;
四是负荷物的总质量。
(2)NIOSH81 输出的结果。分析结束后,NIOSH81 输出的结果如下:
一是动作极限(Action Limit),即99%的男性工人和5%的女性工人能够承受的重量;
二是最大允许极限(Maximum Permissible Limit),仅25%的男性工人和1%的女性工人能够承受的重量[3]。
(3)NIOSH91 分析输出的结果。进行NIOSH91分析后,输出下列结果:
一是起始姿态和终止姿态的推荐重量极限(Recommended Weight Limit),即健康工人在无危险情况下的负荷量;
二是起始姿态和终止姿态的提举指数(Limit Index),即描述物理压力水平的相关评价参数。
2 改善原则
为提高工人操作时的舒适程度,操作过程应遵循动作经济原则。动作经济原则注重在生产制造中使用省力装置,推进机械化的实施,从而减少人工劳动,将操作者用在更智能或非用人不可的工位上,改善工作环境,实施合理化的作业方法,改善作业中的不合理、不稳定因素和浪费,充分发挥人的潜力[4]。
2.1 动作经济原则的四条基本原则
动作经济原则有如下4 条基本原则:
(1)减少动作的数量;
(2)双手同时进行动作;
(3)缩短动作的距离;
(4)轻松动作。
2.2 手握式工具的设计原则
为改善不良设计工具对人体造成的伤害,应采取适当的设计原则。手握式工具的设计原则如下:
(1)避免静肌负荷。当使用工具时,手臂上举或长时间抓握,会使肩、臂及手部肌肉承受静负荷,导致疲劳,降低作业效率。
(2)使组织压迫较小。设计手握式工具时,应尽量分散力量,例如加大手与工具的接触面积,以减少对血管和神经的压力。
(3)保持手腕伸直。
(4)减少手指的重复活动。
3 案例分析
3.1 案例的选取
目前,高速列车装配过程,包括塞拉门安装、前挡风安装等数十个安装工艺,而国内的机车行业尚未对其安装过程进行人机工程问题的评价与分析。因此,选取典型的案例进行分析与改善,有着十分重要的意义。
对高速列车装配过程进行调研、分析,并对若干个关键工序装配工作中存在的人机工程学问题进行统计、筛选。最终选取人机工程学问题最多的制动管安装作为典型案例。
3.2 现场的评估
制动管安装于列车底部。制动管安装工序的人机工程学现场评估中,工人反映有上肢酸痛的问题。具体分析,造成工人上肢酸痛的原因如下:
(1)双手搬运、抬举管排。在安装管排时,工人将管排(约20 kg)搬运至车底,举起管排至车底定位处,保持双手抬举动作,另两个工人固定管排。在此过程中,双手举过肩这一动作,难度较高,极易产生疲劳[5],该动作对肩部斜方肌和肌腱有很大损害[6]。这是使工人产生上肢肌肉酸痛的原因之一。
(2)工具设计不符合人机工程学理论。工人用开口扳手锁紧管排螺母及EO 接头时,需将手臂上举再施力。这一重复性的工作姿态,也是使工人产生上肢肌肉酸痛的原因之一。
3.3 任务的仿真
利用DELMIA 的仿真过程如下:
一是数据采集。获得装配现场各种资源的相关数据。
二是构建虚拟厂房环境,搭建仿真环境。
三是引入虚拟人体。我国不同地区的人体尺寸差异较大,各地区的成年人(18~60周岁)人体尺寸如表3 所列。

表3 我国各地区的人体尺寸表[7]
制动管安装现场的工人均为华北成年男性,故人体模型身高设置为1 693 mm,并选择percentile 为50,即1 693 mm 为平均身高。
(1)任务仿真。在DELMIA 的Human Task Simulation 模块中,对PPR 树中设置资源、产品与工艺之间的关联后,即可进行操作仿真。制动管安装的操作仿真如图1 所示。
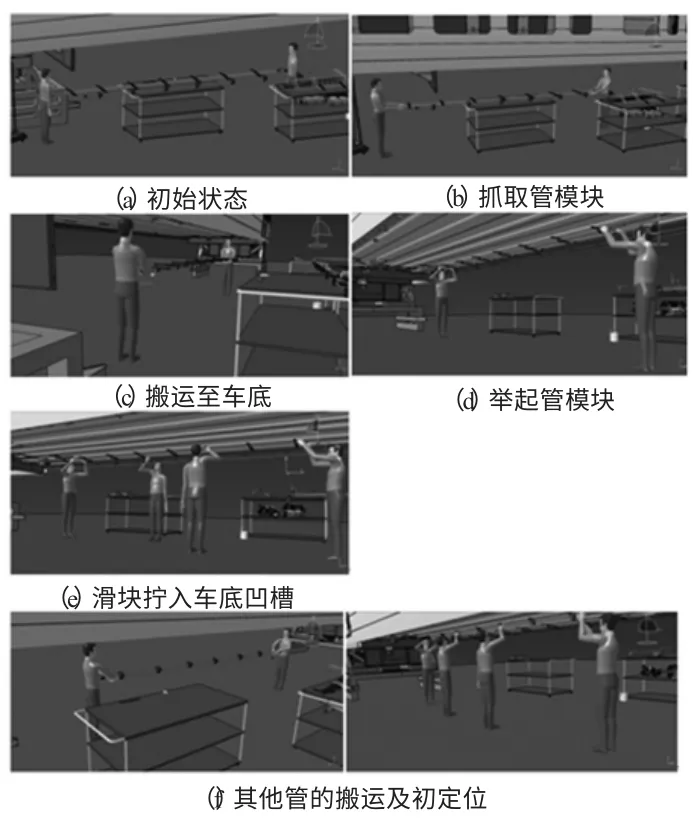
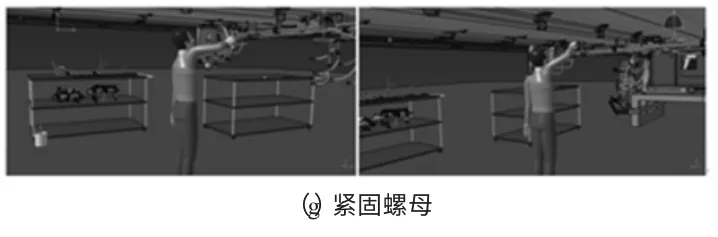
图1 制动管安装仿真操作
(2)仿真分析。下面是应用DELMIA 仿真软件得出的仿真结果及分析,针对不同的问题,采取不同的分析方法,如图2。
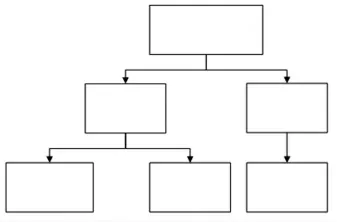
图2 分析方法选择图
3.4 RULA 分析
分别对管排的搬运、抬举以及紧固螺母的动作进行RULA 分析。
(1)对工人搬运管排及举起管排的姿态,进行RULA 分析,得到的结果如图3 所示。
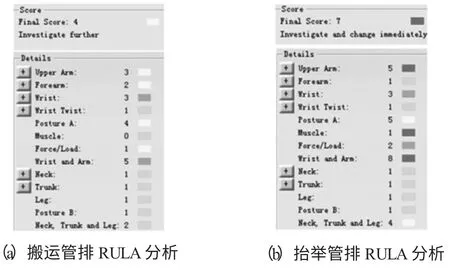
图3 搬运、抬举管排时的RULA 分析
由图3 可知,工人搬运管排时RULA 分析总分得4 分,表明该动作有待进一步研究。
工人将管排抬举至车底时,RULA 分析总体得分为7 分,表明该动作应急需改善。
(2)当螺母的轴线与车底关系不同时(平行或垂直),工人紧固螺母的姿态也会不同。对这两种情况进行RULA 分析的结果如图4 所示。从分析结果可知,这两种动作的得分相当,总体得分均为7,表明该动作应急需改善。
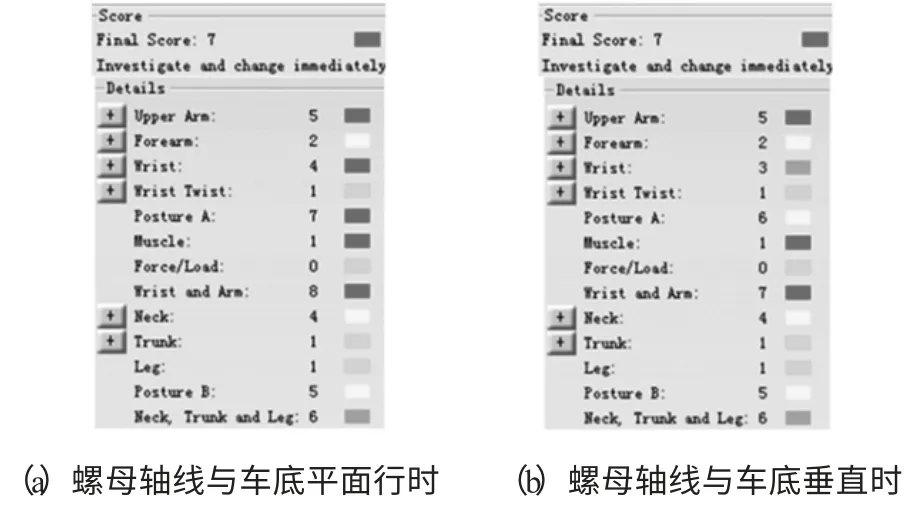
图4 拧螺母时的RULA 分析
3.5 NIOSH 分析
现对抬举管排至车底定位处的姿态做NIOSH91分析。分析结果如图5。
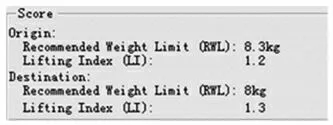
图5 抬举管排的NIOSH 分析
在实际操作中,人体负载总质量为10 kg,大于推荐的负载质量极限(8.3 kg),故这种工作状态,不利于人体健康与安全,应当进行改善。
3.6 改善措施
为改善搬运、抬举管排动作的舒适度,应遵循动作经济原则,可利用现有的设备与资源,来替代人手操作;为避免工人上举手臂拧紧螺母的动作对人体的伤害,应对工具进行改善。
(1)改善方案。对双手抬举管排以及使用不良设计的工具,改善方案具体如下:
第一,为改善双手抬举管排的不良动作,可分别采用管排小车和液压升降平台,来替代人工搬运及抬举管排。
第二,扳手设计的改善方案:根据螺母轴线与车底平面的关系而采取手柄改善,如图6 所示。此两种情况均对扳手手柄进行改善,所需材料可采用制动管安装时的废弃管。
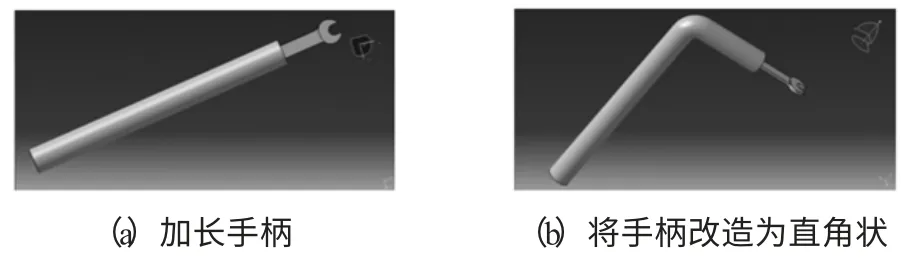
图6 工具改造
(2)改善后任务仿真与比较。将提出的改善方案在DELMIA 环境中进行仿真,检验该方案的可行性。改善后的仿真过程如图7 所示。
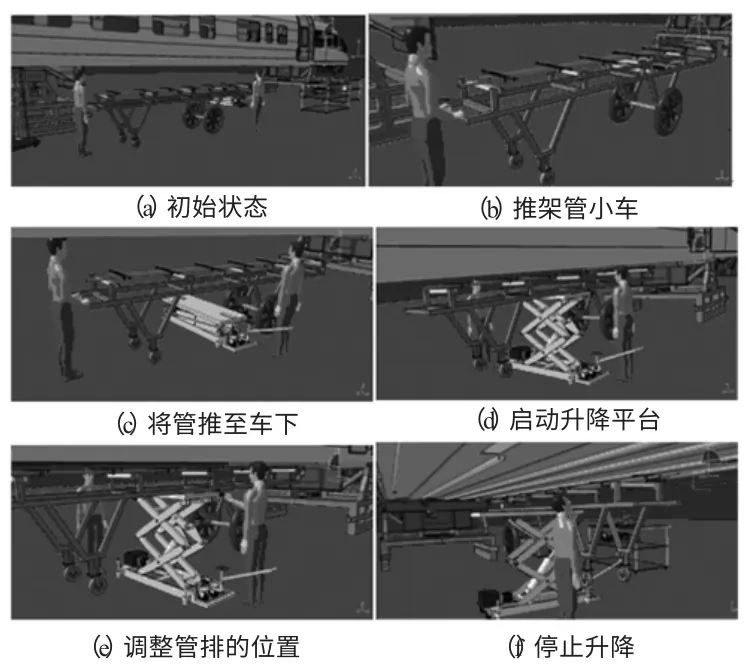
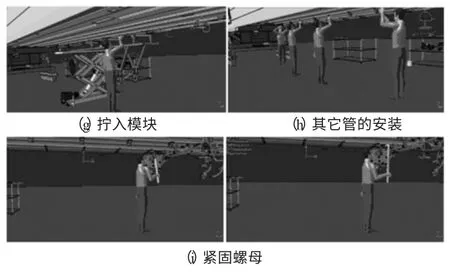
图7 改善后仿真操作
第一,改善后,搬运、抬举管模块的动作变为推车、调整管排位置的动作(如图7(b)、(e))。对改善后姿态进行RULA 分析的结果如图8。
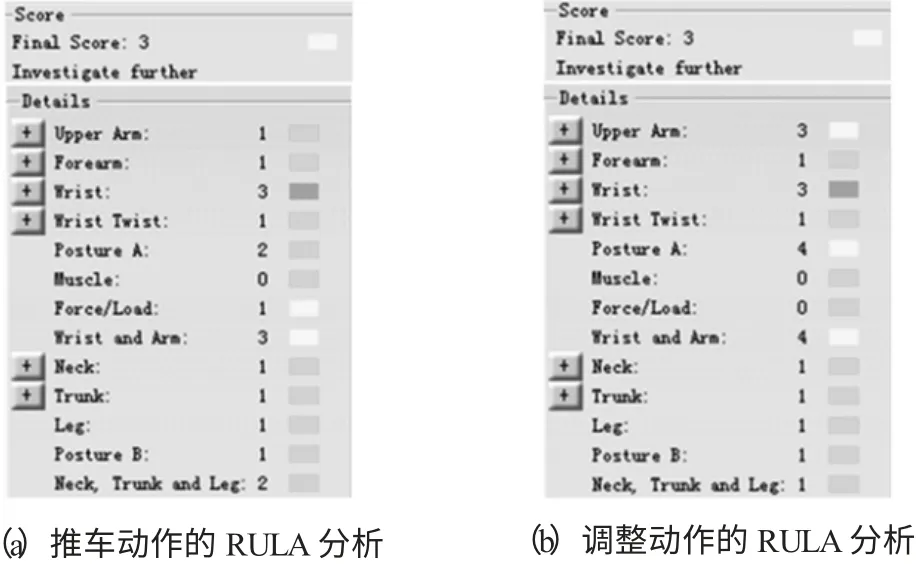
图8 改善后姿态的RULA 分析
从改善后的结果可知,用推车代替人工搬运,上臂和前臂及整体姿态舒适度均有改善。用液压升降平台代替人工抬举管排,人的上臂、肌肉以及扭曲程度均有较大的改善。
第二,使用改造后的工具进行紧固螺母动作的RULA 分析如图9 所示。
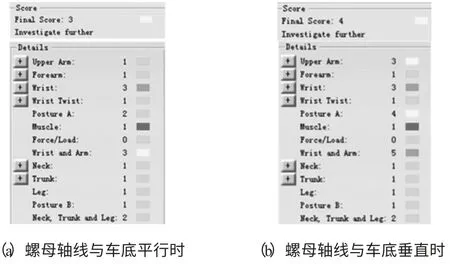
图9 改善后紧固螺母动作的RULA 分析
从图9 中可知,工具改善后,分体在紧固螺母时上臂无需高高抬起,故上臂得分改善明显。
第三,使用液压升降平台后,无需进行抬举管排的动作。
第四,对制动管安装工序相关人机工程学因素进行改善,前后对比情况总结如表4。

表4 改善前后对比分析
其中抬举管模块和紧固螺栓动作在改善后,前臂的舒适度均有较大的改善;改善后无需进行抬举管排的动作,解放了人力,劳动强度也大大降低。
4 结束语
通过对制动管安装现场的人机工程评估,提出了造成工人上肢肌肉不适的原因,包括:人工搬运、抬举重物以及使用设计不良的工具等。
高速列车制动管安装过程的现场人机评估结果与DELM IA 仿真评估结果一致,因此可认为DELM IA 仿真人机评估结果的可靠性高,可在伤害发生之前,就能分析判断其可能发生的情况。
对制动管安装过程的人机工程问题提出改善措施,并再次进行仿真、分析,验证了改善方案可行,且效果明显。
[1]郑 午.人因工程设计[M].北京:化学工业出版社,2005.
[2] Chung M K,Kee D. Evaluation of lifting tasks frequently performed during fire brick manufacturing processes using NIOSH lifting equations [J]. International Journal of Industrial Ergonomics,2000,(25):423-433.
[3] 徐 镇. 基于eM-Engineer 的车身焊装车间人机工程仿真研究[D].济南:山东大学,2009.
[4] 徐明芳,蒋祖华,胥志峰. 轿车前纵梁总成工序的人机工程研究[J].人类工效学,2006,12(4):21-23.
[5] Karhu O,Kansi P,Kuorinka I. Correcting working postures in industry:a practical method for analysis[J]. Applied Ergonomics,1977,8(4):199-201.
[6] Sporrong H,Sandsj觟L,Kadefors R,et a1. Assessment of workload and arm position during different work sequences: a Study w ith portable devices on construction workers[J].Applied Ergonomics,1999,(30):495-503.
[7] 郭 伏,钱省三. 人因工程学[M]. 北京:机械工业出版社,2005.
