基于AMESim的自适应柔性夹具机械手指的动态特性研究
2012-08-27罗天洪孙冬梅李德山
向 琴,罗天洪,孙冬梅,李德山
(1.重庆交通大学机电与汽车工程学院,重庆400074;2.中国石油勘探开发研究院 采油采气装备研究所,北京100083)
夹具是工艺装备的主要组合部分,在机械制造中占有重要地位。夹具对保证产品质量,提高生产率,减轻劳动强度,扩大机床使用范围,缩短产品试制周期等方面都具有重要意义。而在自动生产线中,用于工业夹具的各种型式的机械手应用越来越广泛[1]。它们都是模仿人的手部动作,按给定程序、轨迹和要求实现自动抓取、搬运和操作的自动装置。尤其是在高温、高压、易燃、易爆、多粉尘和放射性强等恶劣环境以及笨重、单调、频繁的操作中代替人类作业,以提高劳动效率,节省人力成本[2]。
对于机械手来说,通常采用组合机构的设计,驱动方式大多是刚性结构,其结构复杂,体积较大,惯性较大,电气伺服控制要求高,制造成本高。针对这些不足,结合柔性气动执行器的研究现状和发展趋势[3],章军,等[4]提出了一种多个手指可组合操作的机械手,其手指各关节可以像人的手指关节一样运动。目前在关节上应用最广的驱动装置是气动人工肌肉[5],然而气压驱动有输出力小、工作噪声大、传动精度和重复度低等缺点,若采用液压驱动,则可以克服上述缺点,在较高液压力的驱动下能获得更大的输出力和更快的响应速度[6]。
综合近年来机械手夹具的研究现状和发展趋势,笔者在人体手指研究的基础上,提出了基于液压驱动的仿手指的自适应柔性夹具的结构设计,并进行了手指驱动系统的动态特性仿真研究。
1 夹手的结构及工作原理
1.1 夹手的结构
此夹具的夹手部分由步进电机、液压缸、手指、齿轮副、机架、手指圆盘、活塞杆组成,其结构如图1。

图1 夹具的夹手模型Fig.1 Model picture of fixture
1.2 工作原理
夹手的工作原理如图1,液压缸2通过活塞杆7推动手指推盘伸长或缩短,促使手指3夹紧或放松。步进电机机体1固定连接于机架5上,步进电机1通过带动齿轮副4转动从而带动手指3旋转,调整加工角度。

图2 手指示意Fig.2 Picture of finger
2 手指动态特性仿真及结果分析
手指的工作由液压系统驱动,其系统稳定性由电液系统决定,通过建立电液系统数学模型、液压驱动系统AMESim仿真模型,对参数设置及仿真结果进行分析,以揭示手指动态特性的规律。
2.1 液压系统电液系统AMESim仿真模型
2.1.1 电液系统数学模型
1)放大器传递函数
为了讨论简洁,把电器环节都作为总电控放大器来处理,即看成输入是电压,输出是电流。由于放大器动态性能很高,可看作是比例环节,传递函数为:

2)电液比例阀传递函数

式中:Ksc为比例阀的增益;ωv为比例阀固有频率;ζ为阻尼比;s为拉普拉斯算子。
“好像只要是一个男子,随便什么样的男子,都可以把厨房收拾得井井有条似的。”妇女们都这样说。因此,那种气味越来越厉害时,她们也不感到惊异。那是芸芸众生的世界与高贵有势的格里尔生家之间的另一联系。
3)动力元件传递函数
液压动力部件是阀控不对称缸,式(3)考虑了由于油缸面积不对称引起的活塞位移的变化,同时考虑到主要是惯性负载和外负载,得到动力元件的传递函数为:

式中:Kq为流量增益;ωh为液压固有频率;ξ为液压阻尼比;C为负载流量等效面积变化系数;T为有效体积弹性模量变化系数;ζ为油缸面积;Kce为流量-压力系数;Ap为负载流量等效面积;Ps为油源压力;βe为油液弹性模量。
4)PID控制器算法

式中:u(t)为PID调节器根据偏差e(t)得出的控制量;kp为比例系数;Ti为积分时间常数;Td为微分时间常数。
2.1.2 液压驱动系统AMESim仿真模型建立及其参数设置
在进行AMESim仿真前,对阀控缸系统采用液压仿真软件AMESim建模,其中驱动液压缸及电液比例阀元件的模型中已经充分考虑了液压油的可压缩性、元件的非线性特性(滞环、死区、泄漏、静摩擦、动摩擦和阻尼力等)[7]。系统仿真模型如图3。
仿真的参数液压部分取自实际驱动系统,机械结构参数由夹具实际参数和UG模型分析测得,其中负载力是通过UG软件动力学分析所测得最大值,如表1。
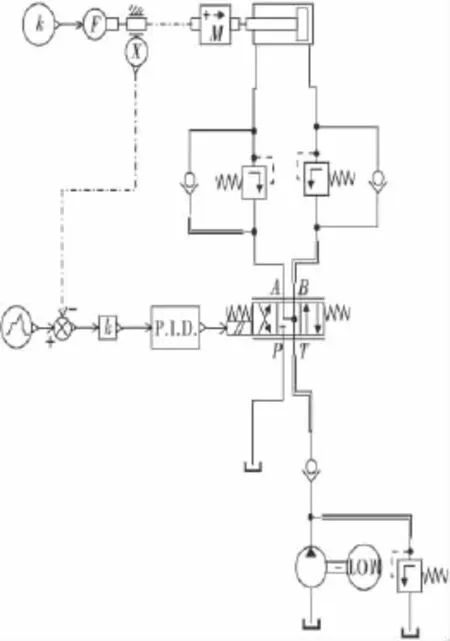
图3 驱动系统仿真模型Fig.3 Simulation mode of driving system

表1 系统参数Table 1 Parameters of system
2.2 系统加载仿真
2.2.1 电液系统的放大比例增益对系统动态特性的影响
为提高手指部分电液系统的控制精度和响应速度,研究调整放大比例增益值(K)对系统动、静态特性的影响。K分别取500,1 000,1 500,进行3次仿真分析,可得相应的对比,如图4。


图4 液压缸特性曲线Fig.4 Hydraulic cylinder characteristic curve
由图4可看出,随着K值的增大,系统的位移控制精度更精准,系统的响应时间更短,但超调随即增大,振荡也变大,从而降低了系统的稳定性。当K=1 000时,系统的控制精度明显提高,响应时间大大缩短,超调量也最小,此时系统的动、静态特性是最好的。然而当K值持续增加时,系统的控制精度虽有提高,响应时间有所缩短,但系统的振荡增加了。因此,并不是K值越大越好。K值过大,动、静态特性改善不明显,系统的超调迅速增大,甚至发散,造成系统的不稳定;K值过小,使系统振荡减小,系统的控制精度明显降低且响应时间延长。因此,存在一个最佳K值,对系统的动、静态特性影响显著。
2.2.2 PID控制器对系统动态特性的影响
为了提高系统的动态特性,在液压系统中加入了PID控制器。并采用扩充响应曲线法确定出参数的大体位置,然后在AMESim中利用批处理功能进行分析,得出了系统的最佳PID参数,并与无PID控制器的液压模型相比较,仿真结果分析如下[8]。
1)活塞杆水平位移
从图5中可以看出,系统中没有加入PID控制器时,活塞杆的位移在0.129 s时达到峰值,为0.034 626 m,在0.422 s时稳定下来,为 0.032 142 m,精度误差为7.858 mm;而在系统中加入PID控制器之后,其位移在0.09 s时达到峰值,为0.040 005 m并稳定下来,其精度误差为0.005 mm。液压缸是通过活塞杆来带动手指推盘伸出或回缩从而带动机械手指的夹紧和放松,所以在系统中加入PID控制器后,机械手指的夹紧和放松的动作更快且更精准。

图5 活塞杆位移Fig.5 Displacement of piston bar
2)活塞杆水平速度
从图6中可以看出,系统中没有加入PID控制器时,其速度在0.072 s时出现振荡,在0.108 s时达到振荡峰值,为 -0.764 788 m/s,在0.453 s时才恢复为0;而加入PID控制器之后,其速度在0.072 s时达到稳定,没有出现超调。如果活塞杆的水平速度出现震荡,机械手指的动作就表现出动作不平稳,从分析中可以看出,在系统中加入PID控制器后,机械手指的动作在0.072 s时即基本达到稳定,未出现震动。
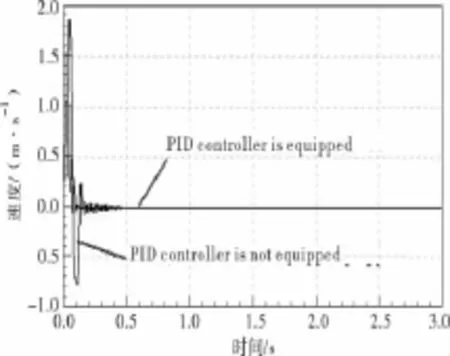
图6 活塞杆速度Fig.6 Speed of piston bar
3)活塞杆水平加速度
从图7中可以看出,在没有加入PID控制器时,其加速度在0.043 s时出现振荡,在0.072 s时达到振荡峰值,为 -118.096 m/s2,在 0.476 s时达到稳定,但仍有小幅振动;而在系统中加入PID控制器之后,其加速度在0.027 s时出现振荡,在0.038 s时达到振荡峰值,为 -89.921 5 m/s2,在 0.106 s时恢复为0;活塞杆水平加速度的变化会导致活塞杆速度的不平稳,加速度震荡时间越久,震荡的峰值越大,活塞杆的速度就越不平稳,从而导致机械手指的动作越不平稳。因而从分析中可以看出,在系统中加入PID控制器后,机械手指的动作在0.027 s时出现小幅震动,在0.082 s时动作趋于平稳,较未加入PID控制器之前有很大的提高。
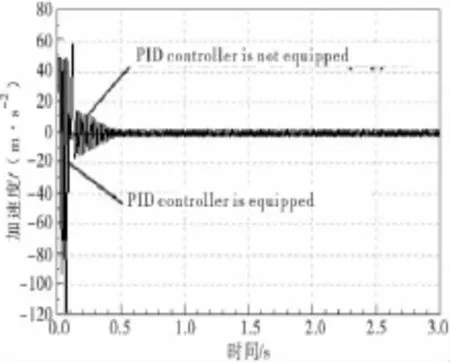
图7 活塞杆加速度Fig.7 Acceleration of piston bar
综上,在加入PID控制器后,系统的位移精度控制及速度和加速度响应时间均得到了改善,使该夹具机械手指的动作更精准,系统更平稳了。
3 结论
分析了自适应柔性夹具的机械手指的工作原理,建立了电液比例控制系统的电液系统数学模型,以及电液比例控制系统的电液耦合仿真模型,通过仿真和优化分析,得到以下结论:
1)与常规的系统分析方法相比,运用AMESim软件来进行电液耦合系统的仿真研究,不但可以解决死区、时变和非线性问题带来的技术困难,而且很好的避免了繁琐的数学耦合模型,可以方便、快捷的建立电液耦合系统仿真物理模型;比通过对实物样机的修改调试,此种分析方法可以明显降低成本和缩短研发周期。
2)通过对系统放大比例增益系数(K值)的研究,可见K值的变化对电液耦合系统的动、静态特性都有明显的影响。过大或过小都不合适,只有通过先进的方法和手段进行在线调整,调整合适的K值,才能达到最优的动、静态特性。
3)通过选用PID控制器,选择合适的参数后,发现它对该夹具机械手指驱动系统的动态特性的改善有着无可比拟的优势。
[1] Ye Zhuang,Li Duanling.Principle and mechanical analysis of a pneumatic underactuated bionic hand[C]//Robotics and Automation Society:International Conference on Robotics and Biomimetics.Guilin,China:IEEE Robotics and Automation Society,2009:432-436.
[2] 周惠明.关节型机械手的结构创新设计[J].煤矿机械,2007,28(10):17-19.
Zhou Huiming.Innovative design of structure for joint bionics finger[J].Colliery Machine,2007,28(10):17-19.
[3] 周泉,张立彬,杨庆华,等.柔性气动执行器的研究现状和趋势[J].机电工程,2003,20(1):6l-64.
Zhou Quan,Zhang Libin,Yang Qinghua,et al.Current situation and tendency of research for flexible pneumatic executer[J].Machine and Electronic Engineering,2003,20(1):61-64.
[4] 章军,须文波,杨宏建.气动式柔性限自由度机械手指[J].液压与气动,2004(8):44-46.
Zhang Jun,Xu Wenbo,Yang Hongjian.Limited DOF pneumatic flexible fingers[J].Hydraulic & Pneumatic,2004(8):44-46
[5] 彭光正,余麟,刘昊.气动人工肌肉驱动仿人灵巧手的结构设计[J].北京理工大学学报,2006,26(7):593-597.
Peng Guangzheng,Yu Lin,Liu Hao.Structural design of a dexterous hand actuated by pneumatic artificial muscle[J].Transactions of Beijing Institute of Technology,2006,26(7):593-597.
[6] 魏星,于萍,周安明.一种液动桑性机械手手腕结构的设计与分析[J].机械设计与研究,2010,26(1):48-51.
Wei Xing,Yu Pin,Zhou Anming.Structural design and analysis for one kind of hydraulic robot wrist[J].Machine Design & Research,2010,26(1):48-51.
[7]王欣,宋晓光,滕儒民,等.基于MATLAB高空作业车电液比例调平系统仿真研究[J].机床与液压,2008,36(4):162-164.
Wang Xin,Song Xiaoguang,Teng Rumin,et al.Proportional electrohydraulic leveling system simulation based on MATLAB for aerial operating vehicle[J].Machine Tool& Hydraulics,2008,36(4):162-164.
[8]刘海丽.基于AMESim的液压系统建模与仿真技术研究[D].西安:西北工业大学,2006.
