仿生昆虫家庭安保机器人运动轨迹的实现
2012-08-22胡秦斌
龙 珑,邓 伟,胡秦斌,覃 晓
(1.广西师范学院 计算机与信息学院,南宁 530023;2.广西肿瘤防治研究所,南宁 530021)
0 引言
根据“十二五”国家发展规划,家庭信息数字化、全智能化将成为我国信息产业发展的重点[1,2]。智能家庭安保信息系统将作为一个新兴产业重要分支出现。智能安保机器人已经从定点作业发展模式转变为智能自主作业发展模式。智能安保机器人主要分为轮式类型的机器人和仿生多足机器人。与轮式类型的机器人相比,仿生多足机器人的运动灵活性和适应性更强,在军事、抢险救灾等领域都有更广泛的实际应用价值[3~8]。在安保机器人领域,家具之间的沟隙(如两张桌子之间沟隙),楼梯等都是非结构家庭环境常见地形,而轮式机器人无法跨越或者在这样的环境行动,仿生昆虫多足式安保机器人通过足端设置传感器,获取准确的地面的信息,调整其步态,并需要迅速准确地改变运动形态,从而完成在这些环境的跨越和工作。本课题机器人是家庭安保机器人,考虑销售成本,这类机器人一定是小型低成本的机器人。本文主要研究小型的仿生昆虫多足家庭安保机器人(以下简称家庭安保机器人)的足端轨迹规划及其实现,以便这种低成本的机器人可以在家庭复杂多变的环境中运行。
1 家庭安保机器人基本机械结构
为了提高机器人适应家庭复杂的运动环境,节约机器人的制造成本,安保机器人采用蜂窝型躯体、仿生昆虫六足关节式的机械结构。蜂窝型躯体的机器人在大量节省制造材料的条件下增大安保机器人的肢节空间,也可以使得安保机器人具有很好的运动稳定性和适应性。仿生昆虫六足关节式结构运用了动物形态仿生学的理念,这样安保机器人在运动稳定性上可进一步提高。安保机器人智能感知控制系统实现对安保机器人的每个足尖点准确地控制,为此研发小组在机器人的六足上各安装了一台低成本的小型直流发电机,此外,为了安保机器人能快速地感应复杂环境,安装了多个足端压力传感器。但是为了减少生产成本,提高产品在市场上竞争力,这种家庭安保机器人的足端压力传感器只能使用普通电阻材料,工作温度范围为-25℃~65℃,不过这样温度的范围已经可以适应大部分的家庭温度环境。
2 预处理足端传感器信号
由于家庭复杂的环境,造成了家庭安保机器人的足端压力传感器包含了很多突变的不平稳噪声,加上为了节约制造成本采用了普通压力传感器,这些不平稳噪声有时候会变成尖峰很高的噪声,必须进行信号的过滤处理,以免影响足端信息处理的效果[9,10]。家庭安保机器人足端压力传感器的输入信号采用基于Mallat小波的快速算法进行去噪,具体的设计原理与步骤如下。
1)信号分解过程处理。根据Mallat小波的快速算法原理,利用合理的小波基函数对家庭安保机器人足端压力传感器的输入信号进行多层次小波分解。
设家庭安保机器人足端压力传感器的输入信号为Signal(n), 根据Mallet小波的快速算法原理,有i0(n)= Signal(n) ,则信号分解工程由式(1)表示:
2)高频低频信息处理。由于家庭安保机器人节约了材料制造成本,虽然足端压力传感器的输入的信号的频率段有0~500Hz,存在高频噪音和高达75Hz的工频干扰,而家庭安保机器人有用的频段只是集中在0~200Hz的区间内。可以采用强制阀值和软阀值相结合的处理方法来处理家庭安保机器人足端压力传感器输出的有用信号和干扰及噪声信号。首先把第1层的高频系数直接设置为0,也就是分解的高频部分采用了强制阀值的处理方式;而2~4层的信号由于即含有有用信号也还有噪声信号,所以对这些的高频系数只能采取软阀值处理,使得三层的噪声逐次衰弱;最后全部保留第4层分解出的低频信息。
3)Mallat小波重构处理。Mallat小波重构可以用式(2)表示:

其中:r为家庭安保机器人的分解半带低通滤波器的冲激响应;t为家庭安保机器人的分解半带高通滤波器的冲激响应。
3 家庭安保机器人足端轨迹规划策略
本文的仿生昆虫家庭安保机器人足端轨迹规划策略主要是针对家庭安保机器人遇到家具之间的沟隙(如两张桌子之间沟隙),根据足端压力传感器的反馈信息快速并准确地选择落足点的位置。
家庭安保机器人的足端轨迹规划系统在硬件设计和智能工程计算等方面都大量运用了动物形态仿生学的理念。硬件设计方面:家庭安保机器人的足端压力器用于感受地面的变化,相当于动物神经感觉末梢部分;家庭安保机器人的智能工程信息处理芯片和信息转换模块类似于动物小脑部分;起到连接通讯作用是CAN总线,相当于动物脊髓,将智能工程信息处理芯片和信息转换模块与家庭安保机器人的直流电机驱动器和串口(相当于动物运动神经部分作用)连接起来;直流电机输起到送动力作用,相当于动物的肌肉部分。在智能工程计算方面:家庭安保机器人的信息处理芯片和信息转换模块独自完成规划机器人的落足点轨迹的工程,然后信息处理芯片和信息转换模块通过CAN总线与直流电机驱动器直接通信控制直流电动机;家庭安保机器人的主控器(相当于人的大脑的作用)完全没有参与整个决策系统,系统只是信息处理芯片和信息转换模块与电机驱动器之间通信传输,大大减轻了主控器的负担,从而提升了机器人反应的实时与有效性。
家庭安保机器人的足端轨迹规划过程是指家庭安保机器人的智能工程信息处理芯片和信息转换模块根据足端压力传感器的反馈的家庭环境信息,智能选择合适的足端落脚点的过程。首先假设家庭安保机器人Tj时刻家庭安保机器人的支撑足的足端压力传感器的反馈值为r(Tj),而下一个支撑足的足端压力传感器的反馈值为r(Tj+1),Tj和Tj+1满足:

其中δT为家庭安保机器人以三角步态行进时的完整步态周期。
假设R为家庭安保机器人的足点与地面接触时足端压力传感器的反馈阀值,则Tj+1成为可靠落足点条件为:
则认为Tj+1时刻足端下方有沟隙,不是可靠的落足点,需要快速地搜索一个新的可靠的落足点。
家庭安保机器人新的落足点搜索顺序如下。
1)家庭安保机器人的左侧搜索顺序是“ 前-左”;
2)家庭安保机器人的右侧搜索顺序是“ 前-右”。
家庭安保机器人按照新的落足点搜索顺序进行搜索,若搜索到新的落足点条件满足式(4)的条件,则可以确定新的合理的落足点,然后停止搜索;反之若无法搜索到合理的落足点,机器人停止运动,在Tj原地不动。整个搜索过程如图1所示。
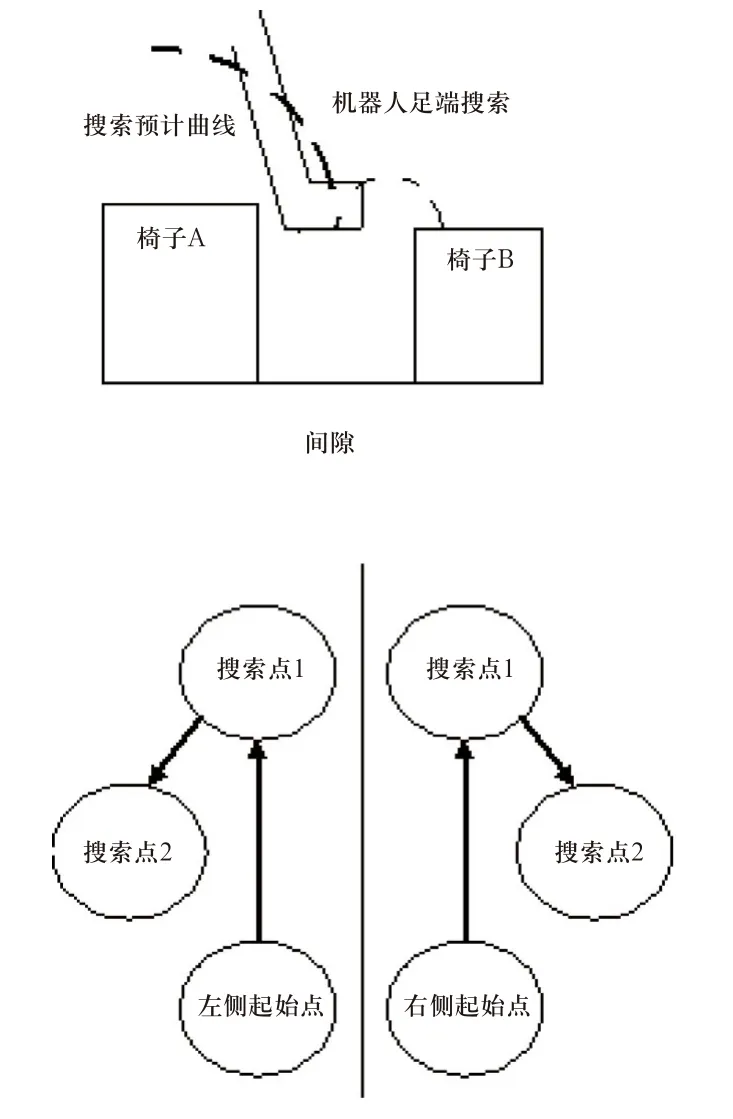
图1 机器人搜索过程示意图
4 家庭安保机器人足端轨迹规划的实现仿真实验
要确定家庭安保机器人的足端轨迹规划的各足端压力传感器的合理阀值,需要知道家庭安保机器人在平面运动行进时各足的受力情况。如图2所示为家庭安保机器人右侧三足在平面上的行进过程所采集到的压力信号图。根据动物形态仿生学原理,设定三足的阀值较为合理值为:前足:40N;中足:60N;后足:30N。
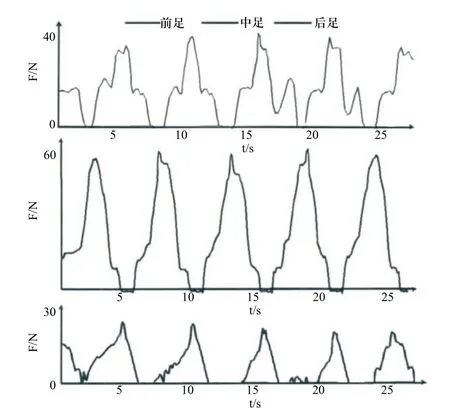
图2 家庭安保机器人右侧三足压力信号图
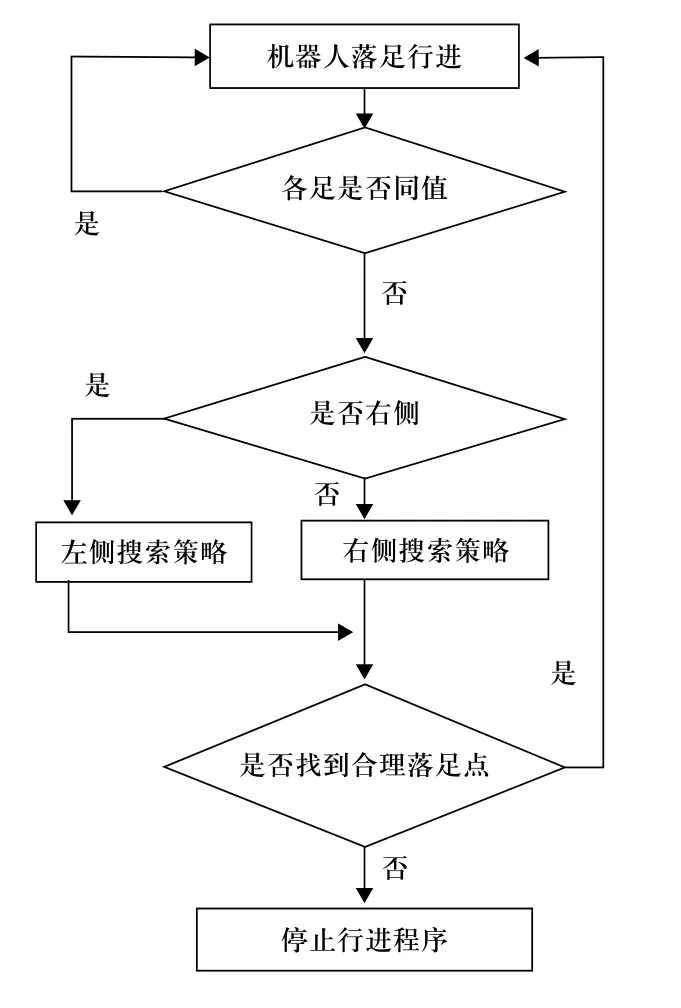
图3 家庭安保机器人足端轨迹规划实现的流程图
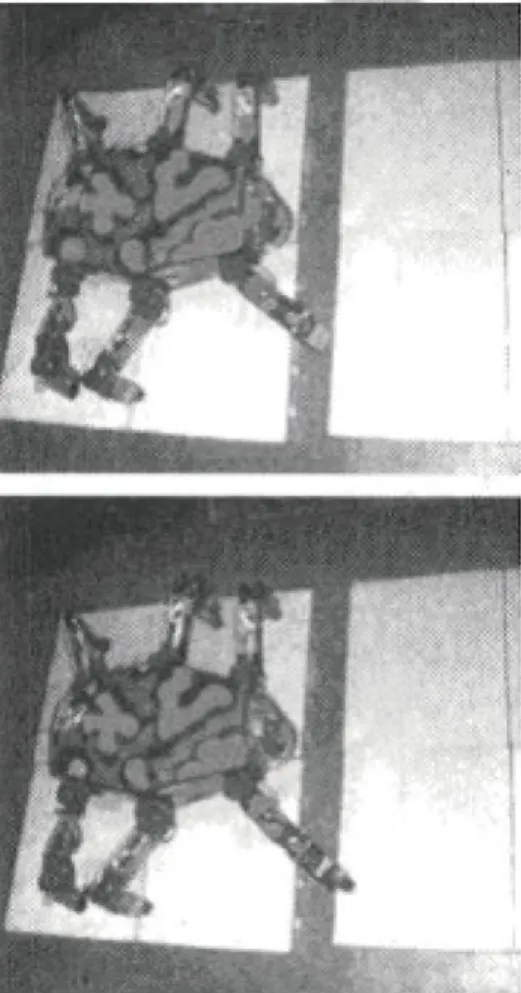
图4 家庭安保机器人足端轨迹规划仿真实验结果图
家庭安保机器人足端轨迹规划实现的流程图如图3所示,家庭安保机器人利用智能工程信息处理芯片和信息转换模块(相当于动物小脑部分)完成这个系统,而不需要主控制程序参加,减少了主控制器的运算压力。家庭安保机器人的仿真实验结果如图4所示。由仿真实验结果可以看出,家庭安保机器人准确地探测到两张桌子之间沟隙存在,并快速找到合理的落足点,这次仿真实验证明了家庭安保机器人适应家庭环境能力较强,足端轨迹规划策略的有效性和实效性都较好。
5 结论
家庭安保机器人已经成为国家发展规划“十二五”中家庭信息数字化、全智能领域重点发展方向之一。本文研究了家庭安保机器人在复杂家庭环境下足端轨迹规划问题。第一步,利用小波快速算法对家庭安保机器人的足端压力传感器的输入信号进行去噪处理;第二步,提出了类似于动物仿生学的家庭安保机器人足端轨迹规划策略,家庭安保机器人落足点的合理选取直接由信息处理芯片和信息转换模块(类似小脑)来完成,减轻了主控制器(类似大脑)运算压力,从而达到提高信息处理速度;最后,通过仿真实验证明了家庭安保机器人足端轨迹规划的合理性与有效性。下一步工作重点是在家庭安保机器人成本进一步控制情况下,进一步提高家庭安保机器人的运行速度,随着新材料和新算法的进一步完善,这样的想法是可以实现的。
[1] James G. Bellingham, kanna Rajan. Robotics in Remoter Hostitle[J]. Science, 2007, 318: 1098-1102.
[2] 赵小川, 刘子峰, 杨立辉. 特种机器人运动轨迹规划及实现[J]. 计算机测量与控制, 2011, 19(8): 2024-2026.
[3] 王华朋, 钟雄虎. 基于模糊化卡尔曼滤波的信息融合[J].计算机测量与控制, 2006, 14(8): 1230-1232.
[4] 赵小川, 罗庆生, 韩宝玲. 机器人多传感器信息融合研究综述[J]. 传感器与微系统, 2008, 26(8): 1-4.
[5] 高玉华, 苏剑波. JMF视频传输技术在Web机器人的应用[J]. 机器人, 2004, 25(3): 218-221.
[6] 徐凯, 冯瑞, 董道国. 基于Web家庭安保机器人视频传输的研究与实现[J]. 计算机应用与实现, 2011, 28(8):131-134.
[7] 王箐华, 崔世刚. 应用几何理论的智能化机器人路径轨迹仿真[J]. 计算机仿真, 2010, 27(3): 153-156.
[8] 孙波, 陈卫东. 基于粒子群优化算法的移动机器人全局路径规划[J]. 控制与决策, 2005, 22(1): 12-16.
[9] 刘召, 陈恳. 被动型机器人控制算法[J]. 清华大学学报,2010, 50(2): 254-257.
[10] 左敏, 曾广平. 基于平行化的机器人智能控制研究[J]. 计算机仿真, 2011, 28(8): 202-205.
