基于通信的列车自动控制系统研究
2012-08-16骆玲玲
刘 洋 骆玲玲
(苏州轨道交通集团有限公司运营分公司 江苏 苏州 215101)
0 前言
列车自动控制系统(Automatic Train Control,简称ATC)系统包括三个子系统,分别是列车自动监控(Automatic Train Supervision,简称ATS)系统、列车自动防护(Automatic Train Protection,简称ATP)系统、列车自动运行(Automatic Train Operation,简称ATO)系统,主要实现地面控制与车上控制结合、现场控制与中央控制结合,达到安全行车指挥、运行调整以及列车驾驶自动化等功能。 基于通信的列车控制系统(Communication Based Train Control,简称CBTC)为ATC 系统的一种类型,主要有两大特点:(1)通过移动闭塞技术缩短运行间隔,提高了列车的运行效率和系统的灵活性;(2)实现了冗余功能。
1 CBTC 系统组成
CBTC 系统主要包括车载控制器 (On Board Control Unit, 简称OBCU)和地面设置的区域控制器、数据存储单元和ATS 系统。 OBCU 测量各应答器之间的距离,并根据速度传感器输入信号计算自探测到一个应答器后列车所行驶的距离。 区域控制器负责控制道岔和信号机,检测其控制区域内所有列车的授权区域。数据库存储单元包含其他列车控制子系统使用的所有数据库,数据库存储了所有相关的线路信息,包括车站停车、坡度、土建限速、道岔位置和信号机位置等。 ATO 属于OBCU 的非安全子系统,主要包括:自动速度控制、自动停站和定点停车、自动启动、停站时分、车门控制、ATS 命令执行、ATS 状态报告、ATP 通信以及故障处理等功能模块。 ATO 从ATP 子系统接收到目标速度、当前速度、当前加速度、位置和其他相关信息,同时通过无线和ATS 子系统通信。ATO可以根据停站程序、 列车启动程序和ATP 的开门使能来控制列车开/关门,通过速度控制程序来控制列车的牵引和制动。 ATS 是一个非安全子系统,它为ATS 值班员提供人机接口,实现列车的自动监督和列车自动调整功能。
2 移动闭塞
为了防止正线上各班次列车对撞、追尾,规定一定轨道区间内同一时间只能运行一列车,此轨道区间称为闭塞区间。
苏州轨道交通一号线采用移动闭塞,这是一种既能保证行车安全(防止两列车发生追尾事故),又能提高运行效率(使两列车的时间间隔最短)的信号概念。移动闭塞是相对于固定闭塞而言的。固定闭塞是在区间设置固定的闭塞分区和相应的防护信号,而移动闭塞虽然也有防护列车运行安全的闭塞分区,但其闭塞区间是移动的,是随着后续列车和前方列车的实际行车速度、位置、载重量、制动能力、区间的坡度、弯道等列车参数和线路参数的变化而改变,随着列车运行而移动。这使得列车间隔的控制更加安全可靠。
目前,城市轨道交通最显著的发展特点就是随着客流量的增大而缩短行车间隔,这样就必须要求有一个高度可靠、连续不断地实现速度显示和速度监督、防护的ATC 系统。采用CBTC 方式的ATC 系统通过移动闭塞技术,高效可靠地实现了上述的功能。
3 正线自动运行
苏州轨道交通一号线的车载ATC 系统采用“头-尾”冗余配置,在正常运行时,列车受到冗余环境中的前端驾驶室OBCU 控制和监督。后端驾驶室的OBCU 处于备用模式。前端OBCU 故障时,功能被切换到后端OBCU,前端OBCU 进入备用模式。 更具体地说对于苏州轨道交通一号线的车载ATC 系统可工作在以下情况(假设前端驾驶室为CAB A1,后端驾驶室为CAB A2):
(1)CAB A1 激活,OBCU A1 激活;
(2)CAB A1 激活,OBCU A1 故障,OBCU A2 激活;
(3)CAB A2 激活,OBCU A2 激活;
(4)CAB A2 激活,OBCU A2 故障,OBCU A1 激活;
为了实现上述的功能,CAB A1 和A2 的OBCU 都必须同时接收来自车辆和CAB A1 和A2 所有的输入。同样,每个OBCU 的输出也同时作用于CAB A1 和A2,到车辆的输出由车辆合并。
下面通过典型的输入输出信号来分析上述(1)与(2)两种情况,(3)、(4)与之类似。
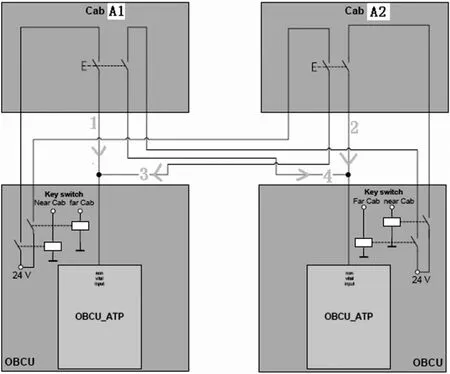
图1 自动折返按钮(输入)配线图
图1 中的Near Cab 与Far Cab 是司机室激活互锁继电器。当激活CAB A1 时,A1 中的Near Cab 继电器得电闭合,Far Cab 失电断开,A2中的Near Cab 继电器失电断开,Far Cab 得电闭合。
图2 中的Non vital output near Cab 与Non vital output far Cab 的控制逻辑与图1 中的Near Cab 与Far Cab 相同。
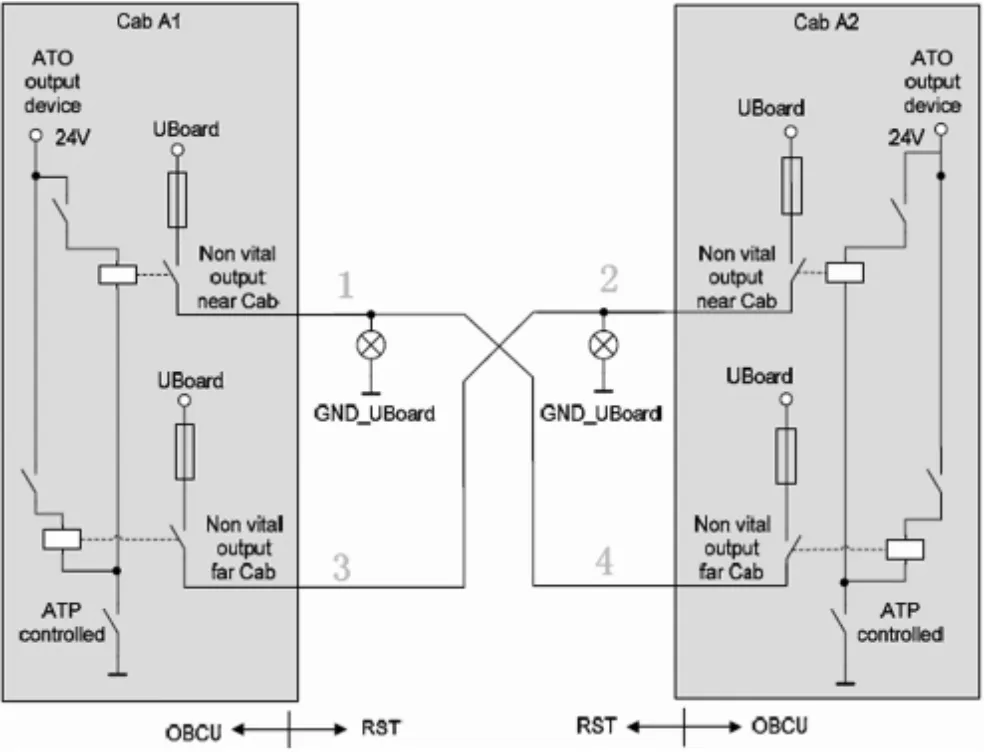
图2 自动折返灯(输出)配线图
(1)当CAB A1 激活,OBCU A1 激活,即正常情况下操作:
输入信号:当在CAB A1 按下自动折返按钮时,图1 中的1、2、3、4路线电平分别为1,0,0,1。 即两个司机室都接收到自动折返按钮的输入信号,两套OBCU 的ATP 系统同时监督列车的运行。 概括的说,两套OBCU 都接收到所有的输入。
输出信号:当按下自动折返按钮后,对于自动折返灯输出信号,图2 中的1、2、3、4 路线电平分别为1,0,0,0, 会点亮CAB A1 的自动折返灯。 也就是说激活的OBCU 才发出输出信号。
(2)当CAB A1 激活,OBCU A1 故障,OBCU A2 激活,即冗余情况下操作:
输入信号:当在CAB A1 按下自动折返按钮时,图1 中的2、3、4路线电平分别为0,0,1。 对于第1 路信号,如果故障并不影响ATP 的输入,那么电平为1,否则为0。
输出信号:当按下自动折返按钮后,对于自动折返灯输出信号,图2 中的1、2、3、4 路线电平分别为0,0,0,1, 同样会点亮CAB A1 的自动折返灯,即仍然有输出信号,只不过这时候A1 司机室的灯是靠A2司机室的OBCU 来点亮的。因为此时只有激活的OBCU A2 才有输出。
从上述分析就可以看出这种苏州轨道交通一号线冗余配置的ATC 系统对列车的安全运行及其重要,因为即使有一套OBCU 故障,仍然可以靠另一套OBCU 的输入输出信号来控制列车的运行。
4 列车终端无人驾驶自动折返
4.1 头尾配置DTRO 正常情况下的自动折返
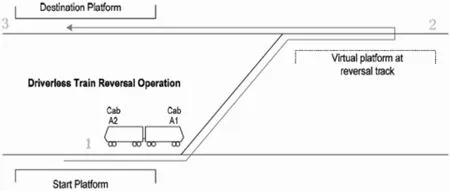
图3 列车自动折返路线路图
当列车进入折返站台,图3 中的1 位置,内置的“自动折返灯”开始闪烁,提示列车司机可以按压自动折返按钮。 司机将“牵引/制动”杆与方向手柄都打到零位, 按下无人折返按钮并保持, 直到按钮灯亮,此时激活端司机室输出自动折返操作1 信号(ARR 信号),代替钥匙激活司机室,司机取下钥匙下车。然后,司机按下站台DRB 按钮后,激活端OBCU 将输出“ATO 模式”指令使得ATO 模式继电器AMR 得电,此时列车向前、牵引指令、制动指令被激活,TCMS 收到这一信息后,将此信息通过网络发送给牵引系统、制动系统,控制列车运行。当列车到达折返线后将自动停车(位置2),此时关端先前端的ARR 信号,另一端输出自动折返操作1 信号(ARR 信号),由于ARR 信号可以代替钥匙激活司机室, 因此两端OBCU 自动进行切换, 即此时另一端的OBCU 激活, 并从WCU 接受新的行车方向移动授权后从折返线自动驶向目的站台(位置3)。
4.2 冗余情况下的自动折返
在一端OBCU 故障的情况下, 列车需要自动折返时, 激活的OBCU 先输出自动折返操作1 信号(本端输出ARR 信号),代替钥匙激活司机室,司机取下钥匙下车。然后,司机按下站台DRB 按钮后,激活端OBCU 将输出“ATO 模式”指令使得ATO 模式继电器AMR 得电,此时列车向前、牵引指令、制动指令被激活,TCMS 收到这一信息后,将此信息通过网络发送给牵引系统、制动系统,控制列车运行。当列车到达折返线后将自动停车(位置2),当列车在折返线停车后,刚才激活的OBCU 将继续处于激活状态, 继续输出自动折返操作2 信号,并通过列车线送到远端, 使故障OBCU 端的ARR 信号为高电平,ARR信号代替钥匙激活故障端司机室,列车从WCU 接受新的行车方向移动授权后从折返线自动使向目的站台(位置3)。
从上述分析可以看出,苏州轨道交通一号线的CBTC 系统,移动闭塞和头尾配置的冗余功能使列车控制的安全性和可靠性都得到很大的提高。
[1]苏州轨道交通一号线项目文件:Interface Specification SIG-RST 信号-车辆接口技术规范[S].2010,05.
[2]林瑜筠.铁路信号新技术概论(修订版)[M].北京:中国铁道出版社,2007.
[3]刘晓娟,张雁鹏,汤自安.城市轨道交通智能控制系统[M].北京:中国铁道出版社,2005.