提高埕岛油田无人值守平台测控系统可靠性初探
2012-08-14黄少伟谢腾腾
黄少伟 , 谢腾腾
(1.中国石油大学 信息与控制工程学院,山东 东营 257061;2.胜利油田胜利勘察设计研究院有限公司 山东 东营 257026)
埕岛油田无人值守平台测控系统始建于1997年,2000年正式投产。该系统实现了海上采油平台无人值守和整个埕岛油田的生产自动化管理,确保了埕岛海上油田的少人、高效、安全运行。海上生产受天气和环境的影响巨大,在恶劣环境下,该系统作为操作员“手”和“眼”的延伸,成为生产和安全唯一可以依赖的手段。如果系统不可靠,轻则无法开关井影响生产,重则面对泄漏井喷束手无策,发生严重的安全环保事故。因此系统的可靠与否,是关乎生产和安全的大事。同时,新规范、新标准的实施以及人们对安全生产认识的不断提高,要求采油平台测控系统具有更高的可靠性。因此,开展对胜利海上无人值守采油平台安全生产监控系统研究,对提高埕岛油田无人值守平台测控系统可靠性具有重要意义。
1 系统安全性分析
通过对埕岛油田采油平台生产工艺、关键设备、生产流程和无人值守的现状进行安全生产分析,确定了影响采油平台安全生产的主要因素有以下几个方面。
1.1 系统无法实施紧急关断
目前,埕岛油田自动化测控系统为一套常规逻辑控制系统(PLC系统)。所有的采油泵过载安全保护、平台集输工艺参数采集、超限报警、紧急切断控制、可燃气体及火灾报警联锁等都由这套系统处理完成。测控参数多,功能繁杂,紧急关断功能不突出。在PLC系统失效或故障时,将无法实施紧急关断,存在严重安全隐患。
1.2 缺少有效的确认和报警手段
平台生产采取无人值守与日常巡检相结合的方式。这种方式改善了工人的劳动环境,但存在以下问题:1)恶劣天气下无法进行巡检。在监控参数出现异常时,不能确认是现场生产出现了问题,还是自控系统出现了问题,只能遥控停井保安全,严重影响了原油产量。2)事故状态下缺少确认手段。当管线阀门泄漏等情况发生时,操作人员无法确认现场真实情况,增加了事故处理的难度,延误了事故处理时间。
1.3 缺少必要的监控手段
埕岛油田属于滩海油田,距离陆地近,渔船作业多,渔民非法登平台盗窃平台原油及生产物资的现象时有发生。针对这种情况,无人值守采油平台缺少有效的监控报警。
2 系统可靠性研究与实现
2.1 设计开发冗余系统,提高系统可靠性
采用冗余技术,可以使整个系统运行不受局部故障的影响,而且故障部件的维护对整个系统的功能实现没有影响,并可以实现在线维护,使故障部件得到及时的修复。冗余设计会增加系统设计的难度,冗余配置会增加用户系统的投资,但这种投资换来了系统的可靠性,它提高了整个用户系统的平均无故障时间(MTBF),缩短了平均修复时间(MTTR)。因此,采用冗余技术是提高测控系统可靠性的有效方法之一[1]。增强冗余系统结构图如图1所示。
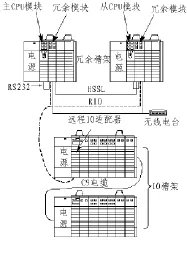
图1 增强型冗余系统Fig.1 Enhanced redundancy system
2.1.1 冗余系统的构成
海上自动化监测系统包括:增强型冗余系统(切换式配置系统)、全冗余系统(双通道配置系统)和混合配置系统。按照“从实际出发,在保证生产正常、安全的前提下,尽可能利用已有设施,降低工程投资和造价”的原则,埕岛油田无人值守平台测控系统中冗余系统方案选择增强型冗余系统。
增强型冗余系统至少包含两个主机架和一个扩展机架。每个主机架上都包含一个中央处理器模块 (CPU),以实现CPU的冗余。输入输出(I/O)模板放在扩展机架上。每个主机架上的CPU都对扩展机架上的输入输出模板进行单独寻址,并通过热备模块实现CPU的互相诊断。这种方式实现了CPU和电源模块的冗余[2-4]。
在工作时,两个主机架上的CPU分为主CPU和从CPU,主从CPU一起工作,一般情况下主CPU完成数据采集和控制,接收并执行中心站的指令;热备模板负责监视主从CPU的工作状态,保证两者间的数据同步;在主CPU出现故障时,从CPU会自动切换为主CPU,并接管控制系统的所有工作,保障监控与通讯的连续运行。
2.1.2 冗余系统的实现
1)系统构成及功能
实施冗余方案的平台自控系统由过程控制系统(PCS系统)和紧急关断系统(ESD系统)两套控制系统组成[5],两者有机结合互相诊断,通过远程模板经DH+网络相连,构成统一的RTU系统。两者信息共享,一旦PCS系统发生故障,中心平台能够通过SIS系统确保平台有效的转换至安全状态。
过程控制系统(PCS)主要功能:将目前RTU系统改造成PCS系统。PCS系统采集、控制生产管理所需参数,包括:电泵运行参数、油温、油压、回压、井下的压力和温度、注水压力、油气水计量、套压、注水计量等。
紧急关断系统(ESD)主要功能:紧急关断系统独立于现有的PCS系统。其中ESD系统监控平台安全参数,进行报警及控制。安全参数包括:油井干温、遥控电泵启停、干压、遥控关闭井下安全阀;遥控快速关断原油平台出口紧急关断阀;平台集输工艺参数超限报警;FGS系统监控火灾、可燃气体检测报警等。SIS系统安全等级为SIL 2。
2)紧急关断系统两级安全保护
埕岛油田主体区域,采用卫星平台与中心平台结合的集输方式。卫星平台生产的油气经加热计量后,靠井口压力通过海底管线混输至中心平台进行油气分离及预脱水等处理,低含水原油通过海底管线输送上岸至海三站,经加热、加压后输送至海四联合站进一步处理。无人值守采油平台集输工艺流程图如图2所示。
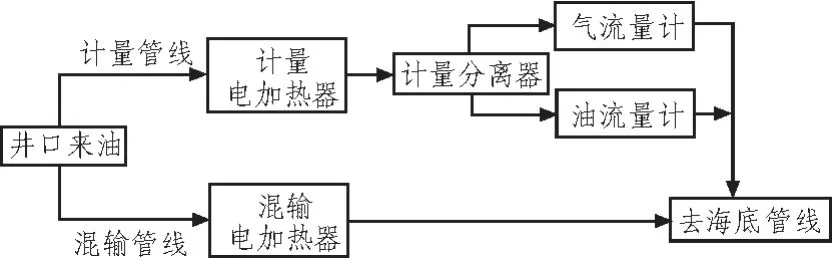
图2 无人值守采油平台集输工艺Fig.2 Unmanned oil platform gathering process
通过对无人值守采油平台集输工艺研究,确定井下安全阀和紧急切断阀为无人值守采油卫星平台的两级安全保护。当油井压力过高或过低,生产流程中出现原油泄漏、生产设备溢油等事故时,为保障油井安全生产、避免发生井喷等严重事故,通过紧急关断系统遥控关闭平台去海底输油管线紧急切断阀,并同时停采油电泵。当平台发生井喷、火灾等重大事故时,通过紧急关断系统遥控关闭井下安全阀、紧急切断阀,并同时停采油电泵,从而确保平台安全。
3)冗余紧急关断系统的实现
①硬件选型
冗余紧急关断系统选用罗克韦尔RSLogix5000系列的1756-L61 ControlLogix5561控制器组成冗余控制系统[2]。系统中包括一对完全相同的机架,每个机架中包括一个1756-L61控制器,用于完成系统的信号采集、逻辑控制、数据通讯等功能;一个1756-CNB/E通讯模板,用于实现控制器与I/O模块机架之间数据通讯;一个1757-SRM冗余模板,用于实现两个机架中L61控制器之间的冗余控制、数据同步等功能。
②冗余配置
ControlLogix的冗余是由特殊的冗余硬件所控制的,系统通过使用一对完全相同的ControlLogix机架,来确保在其中一个机架中的设备出现故障的情况下仍可照常运行。
为了实现控制器的冗余,冗余模板(SRM模板)、冗余控制器安置在不同的机架上,并且有各自独立的电源,它们之间的距离可以分开10 m以上[5]。采用RSLogix5000系列PLC组建的冗余系统不需要额外编程,主控制器和备用控制器的同步对用户来说是完全透明的。一旦系统故障后,可实现无扰动切换。冗余模板之间是通过光纤连接的,并且可以在线替换,不影响用户的过程控制。冗余的控制器可以共享所有的I/O卡件。
冗余系统方案实施之后,采油卫星平台控制系统由过程控制系统(PCS系统)和冗余紧急关断系统构成。PCS系统完成采油平台的生产参数的监控,ESD系统完成对生产的安全控制,两者有机结合互相诊断,并通过冗余通讯链路完成与中心平台的通讯。PCS系统与ESD系统可以通过DH+网络或ControlNet网络进行实时通讯,构成统一的RTU系统,两者信息共享,一旦PCS发生故障时,中心平台仍然能够通过紧急关断系统采集到关键参数,系统发送指令,完成设备遥控,确保平台可以有效无误的转换至安全状态。
2.2 可视化安全监控技术研究及实现
采油平台安全监控系统可以及时有效地发现不法分子进入采油平台,延缓或阻止不法分子对采油设施的盗窃、破坏,尽量减少经济损失。同时,该系统通过信息实时远传,可以及时发现所监视设备的异常。
在无人值守采油平台安全监控系统方案设计上,在体现“综合防侵入体系”主体思想的同时,采用多重防侵入识别技术手段,引入现场数据采集传输、卫星平台视频监控系统报警联动技术以及远程防侵入报警监控技术,实现平台防非法侵入模式由被动保护向主动防御的逐步转换。
2.2.1 可视化安全监控系统总体设计
海洋石油开发无人值守采油平台安全监控系统软件单元设计分海洋开发平台模块和远程监控中心模块两部分。其中,开发平台模块分为非法侵入与生产过程故障信号采集、报警联动控制、报警信息提示和远程数据传输4个子功能;远程监控中心模块分为总体监控和报警显示两个子功能[6]。两个模块之间通过无线网络进行数据通讯,协调工作。可视化安全监控系统总体设计图如图3所示。
海洋开发平台模块通过安全监控主机以及RS-485总线读取开发平台上所有的红外探测传感器、门磁开关与生产监控PLC数字量输出端的输出信号,进行分析处理。若判断为报警信号或故障信号,则控制视频摄像系统联动跟踪到报警区域的预设位置进行监视录像,驱动平台上的声光报警器报警,并将报警数据发送到远程监控中心。为了方便平台工作人员的正常作业,该模块中设置了布防/撤防选择开关,可根据实际需要方便地进行布防/撤防操作[7]。
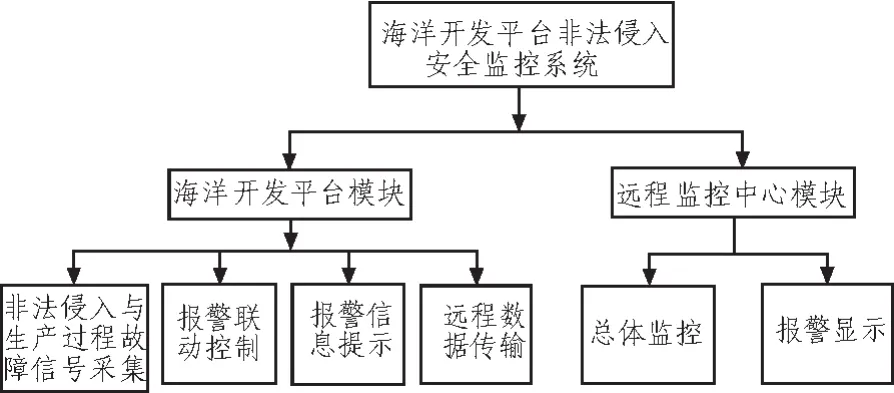
图3 可视化安全监控系统总体设计Fig.3 Visualization safety monitoring system overall design
远程监控中心模块可以对海洋开发平台进行总体的监视与控制,并且可以及时地显示平台报警及故障信息。
2.2.2 可视化安全监控系统实现
根据海上平台总体结构组成,平台防登陆识别主要包括平台周界防范设计、海上平台爬梯部位防非法侵入识别设计和海上平台内部防非法侵入识别设计3部分。通过对海上平台的实际结构进行分析,确定平台重点防登陆部位包括:井口平台周界、工艺平台周界、平台登陆梯、平台登陆门等。海上平台防登陆识别总体结构示意图如图4所示。

图4 海上平台防登陆识别总体结构示意图Fig.4 Offshore platforms,anti-landing identify the overall structure
根据目前防非法侵入识别技术的发展现状及海上平台的实际应用环境,海上平台防非法侵入识别手段主要采用红外线探测、门磁开关探测以及视频监测。其中,红外探测器用于平台周界、平台登陆梯部位的侵入识别,门磁开关主要用于平台登陆门部位,视频监测[8-9]用于全平台以及重点防范部位的监视。
采油平台可视化安全监控技术采用红外、门磁平面探测和视频空间监测的组合方式,对平台进行立体监测,覆盖所有非法侵入重点位置,保证了平台整体非法侵入监控效果,系统具有红外、门磁探测与视频联动跟踪监视功能,方便监控人员对报警点进行快速、直观地检查,综合验证平台非法入侵信息的真伪,可提高报警信息准确率,指导制定适当非法侵入应急措施。
3 结束语
通过对胜利海上自动化测控系统安全性分析,文章确定了影响系统可靠性的3个主要因素,并针对这些问题开展了冗余系统研究和可视化安全监控系统研究。文章提出了提高埕岛油田无人值守平台测控系统可靠性措施并形成了实施方案。冗余系统和可视化安全监控系统的建立,提高了埕岛油田自动化测控系统可靠性,有效的防止了非法入侵,实现了埕岛油田能够在高自动化程度的条件下,安全、高效的可持续生产。
[1]管丰年.生产过程控制系统的可靠性措施[J].石油化工自动化,2005,24(3):5-8.GUAN Feng-nian.Production process control system reliability measures[J].Automation in Petrochemical Industry,2005,24(3):5-8.
[2]严敏.PLC的双CPU冗余控制实现[C]//“A-B世纪杯”集成架构产品应用论文集,2004:78-81.
[3]衡军山,甄成刚.基于软件的双CPU冗余控制研究[J].微计算机信息,2005,21(7):59-61.HENG Jun-shan,ZHEN Cheng-gang.Control software-based dual-CPU redundancy[J].Control and Automation Publication Group,2005,21(7):59-61.
[4]张江维.基于双CPU的冗余控制研究与实现 [J].机电工程技术,2005,34(4):64-65.ZHANG Jiang-wei.Based on dual-CPU redundancy control[J].M&E Engineering Technology,2005,34(4):64-65.
[5]周林,廖常初.提高可编程序控制器控制系统可靠性的措施[J].工业自动控制,2000(6):20-22.ZHOU Lin,LIAO Chang-chu.Measures to improve the programmable logic controller system reliability[J].Industrial Automatic Control,2000(6):20-22.
[6]刘富强,卢赤班.数字视频监控系统及其应用[J].工矿自动化,2003,12(3):31-33.LIU Fu-qiang,LU Chi-ban.Digital video surveillance systems and their applications[J].Industry and Mine Automation,2003,12(3):31-33.
[7]荆慧,赫荣威.基于Internet的视频监控系统的设计与实现[J].北京工商大学学报,2003,21(1):38-41.XING Hui,HE Rong-wei.Design and implementation of the Internet-based video surveillance system[J].Journal of Beijing Technology and Business University,2003,21(1):38-41.
[8]陈媛媛,柴治.基于视频检测的车辆测速方法[J].现代电子技术,2009(23):185-188.CHEN Yuan-yuan,CHAI Zhi.Vehicle speed measurement method based on video detection[J].Modern Electronics Technique,2009(23):185-188.
[9]张贝贝,武奇生.基于视频的高速公路违章停车实时检测算法[J].电子科技,2011(9):20-23.ZHANG Bei-bei,WU Qi-sheng.The study of highway illegal parking real-time detection algorithm based on video[J].Electronic Science and Technology,2011(9):20-23.
