一种改进的IMMPF目标跟踪算法*
2012-08-10崔允贺
周 舟,邓 平,崔允贺
(西南交通大学 信息科学与技术学院,四川 成都 610031)
0 引言
目标跟踪技术在军事和民用方面都具有广泛的应用价值,如何按照被跟踪目标的特点来建立对应的模型,并选择合适的滤波算法,是提高跟踪性能的关键[1]。其中跟踪精度和响应速度之间的矛盾已成为目标跟踪技术的难点。针对这一难点而提出的交互式多模型(IMM,Interacting Multiple Model)算法[2]一定程度上提高了跟踪性能。考虑到模型具有较强的非线性和非高斯噪声背景,Boers Y将粒子滤波(PF,Particle Filter)[3-4]技术运用到目标跟踪中,与交互式多模型相结合,形成交互式多模型粒子滤波(IMMPF, Interacting Multiple Model Particle Filter)[5]算法。该算法对目标跟踪采用多模型结构并运用粒子滤波方法,来克服非高斯噪声,跟踪性能优于基于卡尔曼滤波的 IMM 算法。文献[6]在椭圆跟踪门的基础上加入了速度和角度限定,进一步减少了波门中杂波的个数和计算量,提高了关联跟踪的质量。2011年文献[7]将IMMPF运用于基于GPS航位导航的目标跟踪中,文献[8]提出了基于交互式多模型联合概率数据关联与粒子滤波相结合的算法,改进跟踪当中出现的非线性问题。但它们没有考虑跟踪目标的运动的随机性和粒子滤波中可能会出现的样本多样性丧失的问题。为了克服这两个引起跟踪性能下降的不利因素,提出了一种基于变速率模型和遗传算法(GA,Genetic Algorithm)[9]的IMMPF算法,通过引入交叉和变异操作来增加粒子的多样性,通过变速率目标跟踪模型来提高模型的匹配度。仿真结果表明,对于机动性强的运动目标,改进算法的性能要明显优于 IMMPF算法,同时也优于基于遗传算法的IMMPF算法(IMMGA, Interacting Multiple Model Genetic Algorithm)和基于变速率模型的IMMPF算法(IMMVRPF, Interacting Multiple Model Variable Rate Particle Filter),能够对机动性目标进行更有效的跟踪。
1 IMMPF算法
交互式多模型算法的核心思想是在每一拍,假定其中的一个模型在当前时刻有效的条件下,通过将上一拍各个模型的状态估计进行融合来获得本拍与该模型对应的滤波器的初始状态;然后对每个模型并行实现正规滤波步骤;最后以通过残协方差得到的似然函数为基础,对概率模型进行更新,并将所有经过滤波器修正后的估计值进行融合得到目标的最佳状态估计。
一般的 IMMPF算法由以下几个步骤组成:①输入交互;②滤波计算;③概率模型更新;④状态估计。
IMMPF算法一次循环的具体步骤如下:
步骤1:输入交互
对于模型m,输入的交互运算定义如下:
式中,m ∈ 1 ,2,… ,M,并求得与上式相应的协方其中混合概率。
步骤2:滤波

步骤3:概率模型更新
预测观测的均值:

残协方差:
新息:

新息的概率密度:

似然函数:

概率模型:

式中:

步骤4:输出交互

2 变速率模型和遗传算法
IMMPF算法中的模型选择很重要,当运动模型与被跟踪目标的运动轨迹相匹配时,跟踪精度较高,假如存在较大的模型误差,跟踪精度就会大大降低。为了能更好地对处于机动阶段的目标运动状态进行描述,通过对恒速率模型中的转弯率进行高斯采样,实现了一种变速率模型,提高了模型的匹配度。另外,粒子数也是影响跟踪效果的一个重要因素,粒子数越多,样本集的多样性越明显,跟踪精度也会越高,但是算法复杂度也会随之增加,导致实时性下降。遗传算法的引入能够在粒子数较少的情况下增加粒种群多样性,避免退化现象,增加了跟踪的实时性。
2.1 转弯变速率模型
对目标进行跟踪时,一般需要运用模型进行匹配,目前常用的主要有匀速(CV, Constant Velocity)模型、匀加速模型(CA, Constant Accelerate)、恒速转弯(CT,Constant Turn)模型[10]等。在目标作直线运动时常用CV或CA模型进行匹配,在目标作转弯运动时,CT模型则是常用的匹配模型。
假设目标以匀速和匀角速度运动,CT模型的离散时间状态方程为:


式中:是状态预测矩阵,(1)k-ω是随机噪声。
对正在进行转弯运动的目标进行定位跟踪时,当模型的转弯速率和跟踪目标的真实转弯速率相匹配时,跟踪效果较好,反之,效果会大大降低。目标实际运动过程中,转弯速率ω不可能一直保持不变。为了能够更好的让目标和模型进行匹配,提出一种变速率模型,在不同的时刻对模型的转弯率进行随机采样,提高目标作转弯运动时的匹配度。设变速率转弯模型的状态转移矩阵为:
式中,mM∈,该式表明各模型的滤波器在每一个时刻的状态转移矩阵是一个随机值。其中属于正态分布。该模型能更精准的反映目标的实际运动状态,有更好的稳定性。
2.2 基于遗传算法的粒子滤波
粒子滤波算法的一个最大缺点就是存在粒子多样性丧失现象。在 IMMPF算法中表现为经过几次迭代后,丧失粒子多样性的滤波器极易让目标跟踪转移收敛到个别状态点上去,致使似然函数最后为零,导致跟踪目标的丢失。为了增加粒子的多样性,使样本集能更精准的表达后验概率密度分布,引入遗传算法来解决。
具体实现过程描述如下:
(1)初始种群产生
在时刻k,对于模型m,按照IMMPF算法中的步骤1求得模型交互之后的状态估计值以及对应的协方差,并从中抽取N个样本点,形成样本集计算对应的权值,将作为初始种群。
(2)交叉操作


式中,(0,1)Uξ~,(0,1)U为均匀分布。然后从中选择重要性权值较大的2个粒子取代原来的如此循环直到杂交的子代个数达到了Pc×N其中Pc∈ [ 0.5,1]表示交叉概率。由随机数作为交换概率来对样本实行交叉操作能提高样本的多样性,即使取得的两个样本相同,也能够通过不同的交换概率,产生新的样本,避免了样本丧失问题。
(3)变异操作

(4)权值归一化

最后,将经过遗传算法的粒子集带回到IMMPF算法的概率模型更新阶段。
3 实验结果与分析
为检验基于变速率模型和遗传算法的 IMMPF算法的跟踪效果,在仿真中和IMMPF、IMM-GA以及IMM-VRPF算法进行对比。考虑二维坐标下目标的跟踪问题,设目标的初始状态为:

采样周期T=1 s。在1~10 s,目标在x轴方向和y轴方向以100 m/s的速度做匀速运动,11~19 s,目标以转弯率为0.213 rad/s的速度作左转弯运动,20~29 s,目标作匀速直线运动,30~39 s目标以转弯率为-0.28 rad/s的速度作右转弯运动,40~48 s同样以x轴和y轴为100 m/s的速度做匀速运动。算法中的模型为一个 CV模型和两个作相反运动的 CT模型。迭代次数3G=,变异因子3β=。3个模型间的马尔科夫转移概率矩阵为:

4种算法分别在粒子数 50N= 和 150N= 的跟踪情况,如图1、图2、图3和图4所示。
使用均方根误差(RMSE)作为评价算法估计精度的标准:

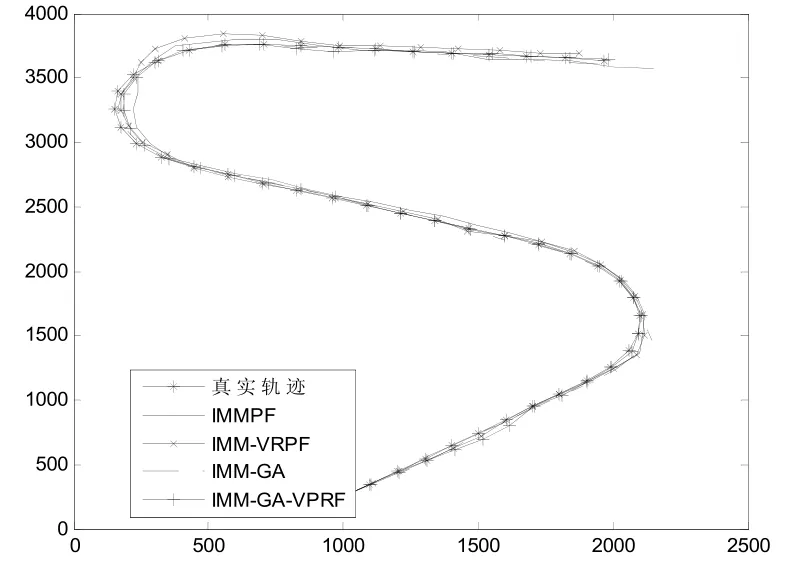
图1 真实轨迹,IMMPF,IMM-VRPF,IMM-GA,IMM-GA-VRPF估计轨迹对比(粒子数 50N= )
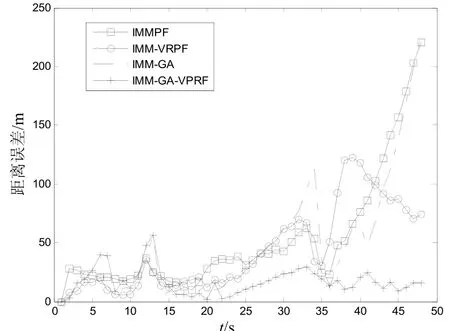
图2 IMMPF,IMM-VRPF,IMM-GA,IMM-GA-VRPF估计均方误差对比(粒子数 50N= )
从仿真结果可以看出,无论是在粒子数 50N=还是 150N=,IMM-GA-VRPF算法的跟踪效果最好,IMM-VRPF和IMM-GA算法次之,IMMPF算法跟踪效果最差。通过图1和图3可以发现,在经过连续的直线、转弯运动之后,IMMPF算法偏离实际运动轨迹比其他3种算法要严重,特别是当粒子数 50N= 时尤为明显。引起该现象的原因主要有:①基于恒速转弯模型的匹配度低于基于变速率转弯模型的匹配度,使得算法中的模型转移概率不明确,跟踪效果差;②在粒子数较少情况下,由于粒子滤波重采样而产生样本单一现象,这使得原本就不多的粒子被大量的过滤掉,导致跟踪目标不稳定,时常偏离目标的真实位置。而通过物种进化论中的交叉繁殖和变异繁殖2个步骤的引入,增加了样本的多样化;同时优化采样,使样本观测密度向权重较大的区域移动,因此算法产生的粒子能更精确地表达后验概率密度,提高跟踪精度和实时性。从图 2和图4可以看出IMM-GA-VRPF算法比IMM-GA、IMM-VRPF、IMMPF算法的性能分别提高 37%、19%、71%和 7%、21%、28%。由于可变速率目标模型只是在不同的时刻对速率进行采样,因此计算开销基本上没有改变。而引入遗传算法后,虽然增加了一定计算复杂度,但是由于粒子数的减少,总的计算量并不会增加。
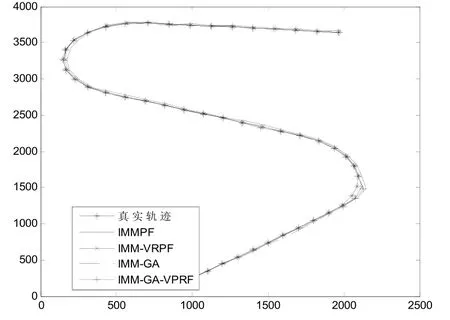
图3 真实轨迹,IMMPF,IMM-VRPF,IMM-GA,IMM-GA-VRPF估计轨迹对比(粒子数 150N= )
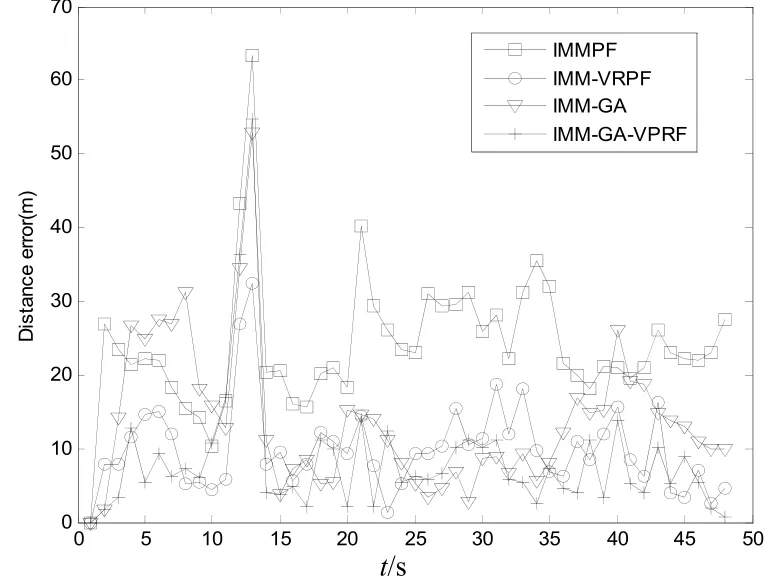
图4 IMMPF,IMM-VRPF,IMM-GA-VRPF估计均方误差对比(粒子数 150N= )
4 结语
文中采用的IMM-GA-VRPF算法,相比IMMPF和IMM-GA算法而言,在目标发生机动时,变速率模型能够提高跟踪精度,更真实反映目标的实际运动轨迹。IMM-GA-VRPF和IMM-GA算法通过引入遗传算法来增加滤波粒子的多样性[11-12],使用较少的粒子数就能获得较好的跟踪效果,改善了跟踪的实时性和精准性。经仿真表明,IMM-GA-VRPF算法和另外3种算法相比,它能够有效地结合遗传算法和变速率模型的优点,具有更好的跟踪效果。
[1] 周弘仁,敬忠良,王培德.机动目标跟踪[M].北京:国防工业出版社.1991: 2-6.
[2] BLOM H A P, BAR-SHALOM Y. The Interacting Multiple Model Algorithm for Systems with Markovian Switching Coefficient[J]. IEEE Trans on Automatic Control, 1988, 33(08):780-7836.
[3] CHENG Chang, RASHID A. Kernel Particle Filter for Visual Tracking[J]. IEEE Signal Processing Letters,2005, 12(03):242-245.
[4] 付何伟,金明录,崔承毅. 粒子滤波冲采样及在盲均衡中的应用[J].通信技术,2010,43(07):25-30.
[5] BOERS Y, DEIESSEN J N. Interacting Model Particle Filter[J].IEEE Proc-Radar Sonar Navig.,2003,150(05):344-349.
[6] 郑光海,陈明燕,张伟.IMM概率数据关联算法的都充门限研究[J].通信技术,2010,43(07):228-232.
[7] YANG Ning, DING Bin, ZHANG Jianming. Performance Test of Interacting Multiple Model Particle Filter for Maneuvering Target Location[C]. Shanghai:Measuring Technology and Mechatronics Automation,2011: 850-853.
[8] 章飞,周杏鹏,陈小惠.基于粒子滤波的交互式多模型多机动目标跟踪[J].数据采集于处理, 2011,26(02):181-187.
[9] PARK S,HWANG J,ROU K, et al. A New Particle Filter Inspired by Biological Evolution: Genetic Filter[J]. International Journal of Advanced Robotic Systems (S1729-8806),2007,I(03):183-190.
[10] QIU B S, LIU H Y, CAI Y Q, et al. An Adaptive Parameter Model for Maneuvering Target Tracking[C]//The 4thInternational Conference on Signal Processing, ICSP’98.Beijing: IEEE,1998:564-469.
[11] 许敦,张保稳.一种基于遗传算法的业务排序方法[J].信息安全与通信保密,2011(02):41-42,45.
[12] 龙崇剑,陈恭亮,张爱新.基于遗传算法的密码分析方法[J]. 信息安全与通信保密,2007(03):32-33,34.
