高速列车安全运行电磁控制系统的研究*
2012-08-08姚永利陈光武苗亮亮
姚永利,陈光武,苗亮亮
(兰州交通大学光电技术与智能控制教育部重点实验室,甘肃 兰州 730070)
铁路自提速以来,保证列车运行安全成为我国铁路发展的主要目标,也是国内外学者研究的重点。研究表明,在铁路线路方面,影响列车安全运行的主要因素是弯道上的曲线通过能力和线路上的轨道平顺性。弯道上运行的列车会受到离心力的作用,当速度达到一定值时有可能导致列车脱轨,照成巨大的人员伤亡和财产损失[1]。轨道平顺性是影响列车运行速度的主要因素,若轨道的平顺状态不良,则由它激起的轮轨作用力和列车振动就会随着车速的提高而急剧增大,甚至导致列车脱轨、掉道、倾覆等,严重影响列车运行的稳定性和安全性[2-3]。保障高速列车运行安全性不仅要克服列车提速后带来的一系列问题,还要考虑恶劣环境或各种突发状况对列车运行的影响。目前现有的解决办法主要是从2个方面入手:一是从系统输入入手,采用更高标准的铁路线路,提高列车运行状况来满足系统要求,如铺设整体道床,采用高平顺轨面,增大曲线半径等;二是从系统结构入手,使其满足不同工况,不同速度等级下列车的运行,如目前采用的机车车辆悬挂系统或外轨超高等。但这些措施仍存在一些问题,如整体道床可能出现翻浆冒泥或导致线路变形的情况;外轨超高可能造成货物倾泻或乘车人员的不舒适感,甚至导致列车脱轨等[4]。最新研制并已投入运营的摆式系统采用主动控制方式,有效地提高了列车的曲线通过速度,但它结构复杂,造价昂贵,并未得到广泛应用。目前证实的磁轨制动和轨道涡流制动系统可以对高速列车采取有效制动,但它对沿线轨道线路状况的要求比较高。电磁安全控制系统就是基于上述考虑,综合列车运行过程中涉及的各种状况,包括列车速度、线路状况、曲线半径、外轨超高、轨道不平顺、外界环境干扰、列车自身结构特性等[5],综合优化得出的系统设计方案。用以提高列车运行速度,缩短运行时间,保障运行安全为目的,从铁路所面临的实际问题出发,为列车提供安全、可靠、实用、经济的设计方法。
1 总体设计方案
列车与线路间的联系是通过轮轨间相互作用力来实现的,如图1所示,左右轮轨间受力不均匀是影响列车安全运行的直接原因。本论文就是从轮轨间的受力关系着手,通过对轮轨间作用力的控制,使同一转向架上的左右两轮轨间受力趋于平衡,来实现列车在弯道、轨道不平顺以及自然环境恶劣情况下的安全高效运行。
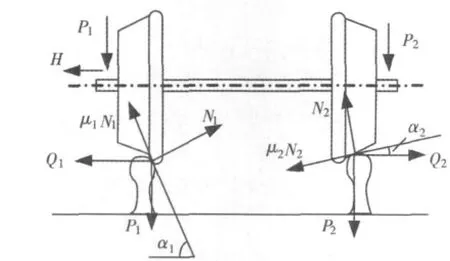
图1 轮对与轨面间的受力关系图Fig.1 Diagram of wheels on the rail surface force
电磁安全控制系统的设计思路是在车体特定位置安装电磁模块,实现列车运行过程中轮轨间受力趋于平衡的安全控制。本方案充分考虑铁路线路状况、车体固有属性、恶劣环境因素等,从安全性、高效性、经济性和实用性考虑,设计电磁控制系统,系统整体结构如图2所示。
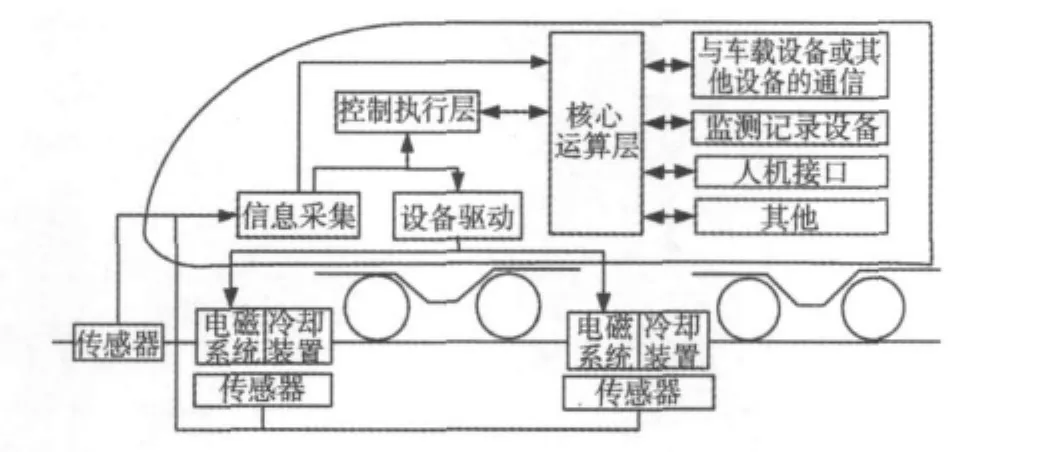
图2 系统总体结构图Fig.2 Whole structure of system
本系统的基本原理就是当列车运行在特定区段时,电磁安全控制系统根据各类传感器实时采集列车的状态信息和线路信息,并且通过车载设备接收到应答器、轨道电路或RBC传来的信息[6],得到当前运行状况或预测前方路况。核心控制单元判断需要进行调整时,控制电磁模块产生不同的控制力,作用于钢轨,使左右轮轨间的受力关系趋于平衡,实现列车安全平稳运行。整个系统是一个闭环主动控制系统。当列车经过道岔区段时,通过车载设备的指令来和自身的保护装置来控制电磁模块的自动收缩,以保护电磁模块。
本系统采用闭环控制,完成系统的实时调节。根据核心控制层传来的控制命令,驱动电磁制动器,同时根据采集部分测得电磁系统的实际作用力来判断电磁制动器的执行情况,并将测得控制力进行实时调节,使实际作用力尽可能满足系统要求。
2 系统结构及功能
电磁安全控制系统主要由中央处理单元、信息采集单元、控制执行单元、设备驱动单元和外围器件等组成。系统通过信息采集模块传来的线路状况信息或是由车载设备传来的控制信息,经过中央处理单元控制执行单元对现场设备进行驱动,实现对列车运行的安全控制。并将相关信息进行记录或传送到车载系统。列车在运行过程中,中央处理单元将车载设备传来的控制命令和信息采集单元传来的现场数据进行分析处理,输出控制信息到执行单元,驱动电磁系统实现对列车运行的控制调整。
电磁安全控制系统按执行方式划分,可分为3层结构:信息交互层、核心控制层和驱动采集层,如图3所示。其中核心控制层是电磁控制系统的核心层,控制整个系统的运作。
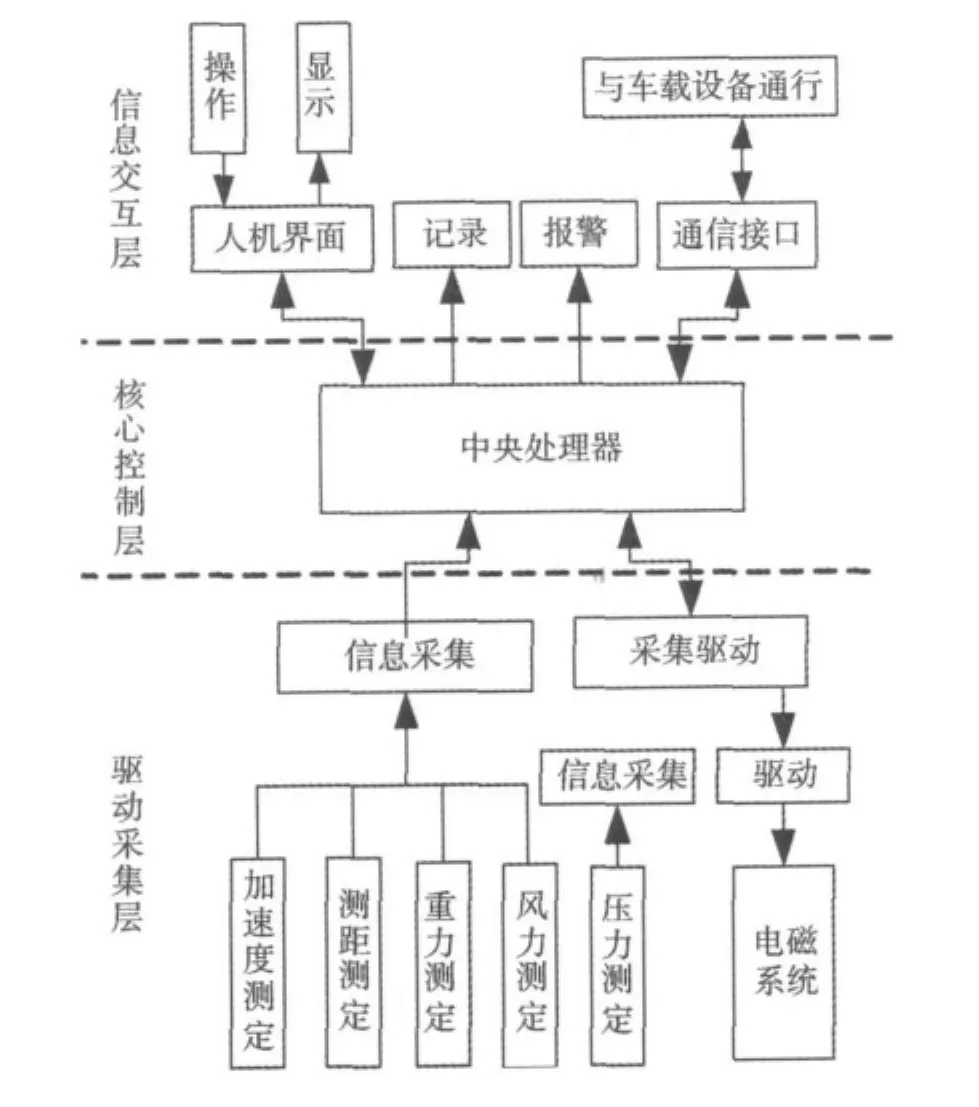
图3 系统分层结构图Fig.3 Hierarchy structure of system
2.1 信息交互层
信息交互层主要实现人机交互和设备通信,由通信接口、人机界面、记录设备和报警装置等组成。
(1)通信接口主要实现与车载设备的信息交互。它不仅可以接收车载设备传来的控制命令,而且可以将控制执行情况传送到车载设备,实现信息双向传输。通信接口传输的信息主要有:运行速度、线路状态、外间环境、报警记录、设备启/停用、紧急制动等。
(2)人机界面主要实现人机交互。它完成相关信息的人工输入和显示输出。人工输入主要是对系统控制范围上、下限值的参数设定和对控制、执行、操作等命令的输入或修改等。控制输出主要是对历史信息的查询,重要信息的确认,系统运行状态的在线查看和现场状况的实时显示等。
(3)报警装置实现对设备故障、操作错误、通信中断、线路破坏等情况的报警,以及当环境的恶劣程度超出系统控制范围或控制力超过系统最大额定值时,危及行车安全情况的报警。
(4)记录装置对涉及行车安全的敏感信息进行记录,包括采集信息、故障信息、操作信息、执行信息和报警信息等。便于日后的性能分析、故障诊断和打印存档等。
2.2 核心控制层
电磁控制系统中的信息处理、安全控制、算法实现、输入输出控制等都是在核心控制层实现的。核心控制层对信息采集单元传来的各类信息(包括列车运行情况、线路平顺状况、设备工作情况和现场环境状况等)进行解析,得出它们对列车运行的影响(当前时刻和未来几个时刻内的影响),判断是否需要采取应对措施。对需要做出调整的情况,经过分析处理,得出控制力的大小、方向和作用时间等,将这些控制信息传送到驱动采集单元动作电磁系统。同时接受驱动采集单元传来的控制反馈信息,实现电磁控制系统的实时闭环控制。
核心控制层中央处理器也可直接接收车载设备传来的控制命令,驱动执行设备进行控制,或通过和车载设备的通信,辅助电磁系统的控制执行(例如参数设置、信息校核、命令修改等)。中央处理单元还对系统各设备的运行状态进行实时监测,如果检测到某个设备故障,立即采取应对措施。
此外,本系统还接收到车载设备传来的道岔信息。若前方为道岔区段,则应控制驱采模块,将电磁制动器提起,以防止列车通过道岔对电磁系统造成的物理破坏。当列车通过道岔区段时,再将电磁系统恢复到原来位置。
2.3 驱动采集层
驱动采集层主要由信息采集和设备执行两部分构成。
(1)信息采集部分包括加速度、风压、重力和轨距测定模块,实现对列车重力、所受离心力、风力、轮对所受横向力、纵向力、轮轨间横移量和轨距等的测定。
加速度测定模块主要是对横向和垂向加速度(这些加速度主要是由于列车曲线通过、蛇形运动,或线路坡度、轨道不平顺、地震等产生的)进行测定,得到轮对所受横向力和垂向力,以此来测定列车运行状况。
风力测定模块用于测量列车运行过程中所受风压的大小和方向,本系统将一定速度下列车所受的侧风风力划分为4个等级进行控制,如表1所示。
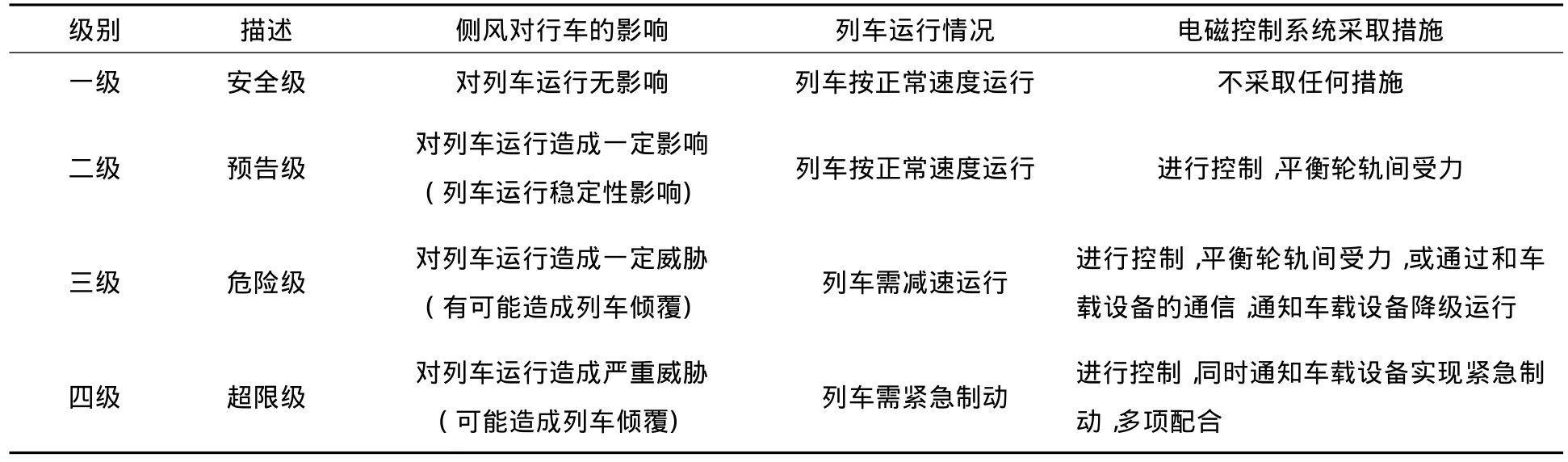
表1 侧风影响等级表Table 1 Scale of the impact of the crosswind
测距模块完成钢轨轨距和轮轨横移量的测定,轨距变化通常是由轨道不平顺引起的,轮轨横移量通常是由蛇形运动产生的,对这些数据量的测定都是通过轮对中心线距两钢轨间距离的变化来进行测定的。
(2)设备执行部分包括电磁系统、电磁作用力测定模块、冷却装置组成。冷却装置由温度监测设备和冷却设备组成,通过对电磁系统温度的监测,降低电磁制动器的温度。
由于本系统安装在列车上,所以,测得数据比轨检车测得数据真实可靠。
3 设备安装及试验
3.1 设备安装
电磁安全控制系统结构简单、设计灵活、安装方便,理论上只要满足车体整体轮廓不超过规定限界,安装位置可有多种选择[7]。而本设计依据转向架的位置,将电磁安全控制系统安装在轮轨系统中,便于信息的采集传递和轮轨力的控制。也可根据实际使用情况进行调整,或是和其他车载设备进行集成,作为车载系统的子模块,除保留与车载设备的通信接口外,将人机交互层其他设备通过车载系统的相应设备进行替换。
本设计中的电磁制动器由多套电磁铁组成。每根钢轨上方对应位置安装2组电磁铁,一组设置于钢轨轨面上端的横向电磁铁,用于产生纵向磁力;另一组设置于钢轨轨头外侧的纵向电磁铁,用于产生横向磁力。对控制力的测定通过压力传感器实现。每块电磁铁对应1个压力传感器。电磁控制系统工作时,电磁系统中的多套电磁铁同时动作,共同作用于钢轨。在本设计中,考虑钢轨轨头为(70±0.5)mm,轮对为135 mm,踏面为 85 mm左右,电磁系统的安装位置最好在轮轨前端,且每套电磁系统都包含多组电磁铁,这样设置便于系统控制调节,电磁系统的设置情况如图4和图5所示。本系统中加速度传感器在水平方向和垂直方向分别设置,压力传感器安装在车体两侧,轨距传感器安装在车体底部。
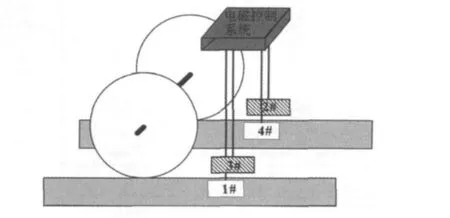
图4 电磁系统侧视图Fig.4 Side view of the electromagnetic system
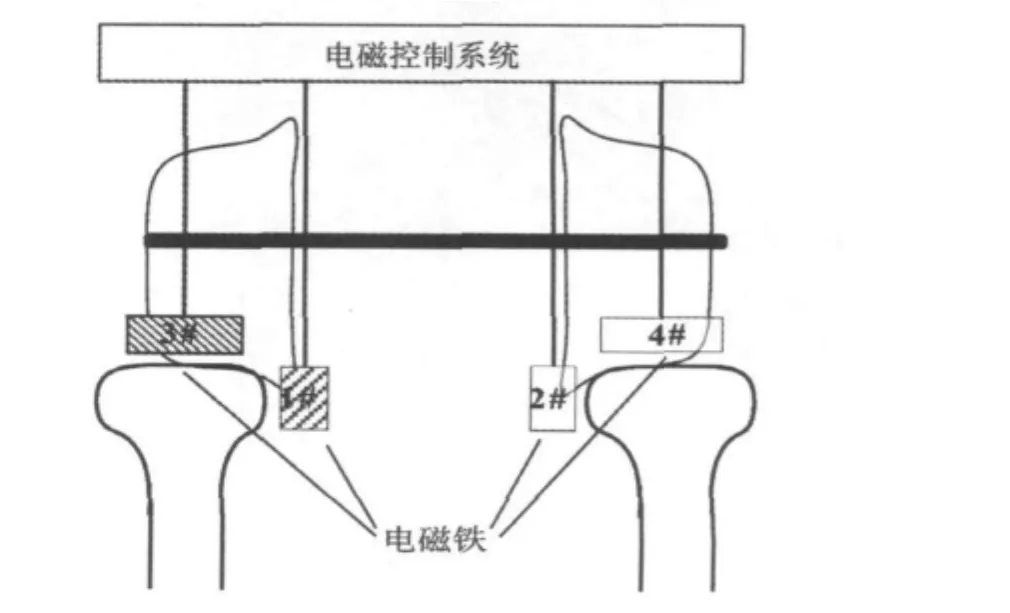
图5 电磁系统正视图Fig.5 Front view of the electromagnetic system
当安装有电磁控制系统的列车通过道岔时,由于道岔区段特殊结构,会碰撞到电磁制动器。因此,在道岔区段,需要将电磁制动器提起来,确保列车顺利通过道岔区段。
电磁控制在每一车辆内分别设置。根据列车通信网络(TCN)标准,同一电磁控制系统中不同设备的连接采用多功能车辆总线(MVB),实现控制单元和采集、执行单元的互联;不同车辆间电磁控制系统的连接则采用绞线式列车总线(WTB),实现车辆之间的串联数据通信[8]。
3.2 试验平台
由于条件所限,并不能在实际的列车上进行试验,因此,设计了一套动态模拟系统。首先通过模拟平台模拟弯道、侧风、轨道不平顺等情况,然后利用装有的电磁控制系统的模拟小车(如图6所示),在模拟平台上进行试验。
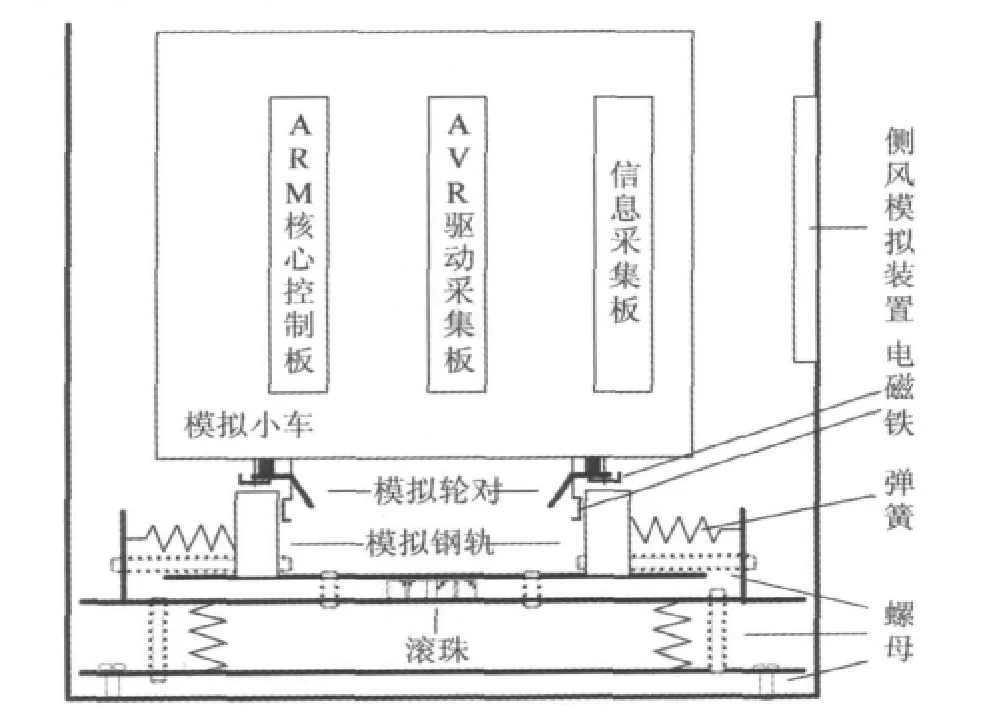
图6 电磁安全控制系统的模拟系统原理图Fig.6 Schematic diagram of the simulation system electromagnetic safety control system
4 试验结果分析
4.1 曲线通过能力的模拟
提高曲线上行驶列车的安全性和运行速度是本设计的核心功能。在模拟平台上,利用调节器将电动机调节到不同的转速,通过旋转轴,使旋转平台开始转动。
(1)未启用电磁控制系统时,当速度为0.967 m/s时,所产生的离心力F离为:

离心加速度a离为:

模拟小车的脱轨系数Q/P为:

其中:v为列车运行速度;m为列车质量;r为曲线半径;Q为车轮所受的横向力;P为车轮所受的垂向力。
(2)启用电磁控制系统时,当速度为0.961 m/s时,所产生的离心力为2.367 N,离心加速度为1.924 m/s2,左侧电磁铁的横向力为2.49 N。车轮所受的横向力为离心力与电磁控制系统所产生磁力的合力,由于这2个力方向相反,大小基本趋于相等,因此,Q与P的比值趋于0。理论值基本与实验结果相符。
由上述结果可知:电磁控制系统提高了列车通过弯道时安全性。同时,也可以说明当在安全性不变的前提下,列车能以更高速度通过弯道。
4.2 减小侧风影响的模拟
(1)未启用电磁控制系统时,当模拟平台的速度为0.881 m/s时,所产生的离心力为1.989 N,离心加速度为 1.617 m/s2,侧向的模拟风力为1.26 N。
模拟小车的脱轨系数Q/P为:

由于风力与离心力共同作用,使本次试验比未启用电磁控制系统时的脱轨系数有所增大。
(2)启用电磁控制系统时,当模拟平台的旋转速度为0.871 m/s时,所产生的离心力为1.944 N,离心加速度为1.581 m/s2,左侧向的模拟风力为1.25 N,左侧电磁铁输出的横向力为3.22 N,垂向力为 0.16 N。
由上述结果可知:电磁控制系统明显减小了侧风对行车安全的影响。
试验证明:在模拟列车通过弯道时,电磁控制系统的作用比较明显。当有侧风的情况下,电磁控制系统使列车更加安全平稳运行。综上可知:列车电磁控制系统可以在现有基础上提高列车通过弯道时的速度,在平直轨道上提高列车的舒适性,同时可以大幅提高列车的安全性[9]。但具体能提高多少,需综合考虑其安全性、可靠性和舒适性等指标和现场试验才能得出准确结果。
5 结论与展望
电磁控制系统是提高运行效率、保障行车安全的人工智能控制系统。系统安全高效,操作简便,能有效地提高列车曲线通过能力,同时减小轨道不平顺、侧风和地震等各种不利因素对列车运行安全的影响,有效降低了列车脱轨、倾覆、线路破坏变形等的危险情况。在列车运行控制系统中,它既可以作为一个封闭系统单独使用,通过和车载设备的通信,控制列车安全高效运行;也可以嵌入到车载系统中,作为其中的一个子模块使用。在实际运用中可采用双机热备、二乘二取二或三取二冗余设置,保障系统更高的安全性和可靠性[10]。鉴于本系统涉及的内容比较复杂,未能在实际的铁路系统中进行实验,仅能通过动态模拟试验证明系统的可行性和先进性,为进一步深入研究和实际应用打下基础。
[1]Jin X S,Wen Z F.Effect of discrete track support by sleepers on rail corrugation at a curved track[J].Journal of sound and Vibration,2008,315:279 -300.
[2]刘宏友.高速列车中的关键动力学问题研究[D].成都:西南交通大学,2003.LIU Hong-you.Study on the key dynamic problems in high-speed train[D].Chengdu:Southwest Jiaotong U-niversity,2003.
[3]佐藤吉彦.新轨道力学[M].徐 涌,译.北京:中国铁道出版社,2001.Yoshihiko.New track mechanics[M].XU Yong Trans.Beijing:China Railway Publishing House,2001.
[4]严隽耄,傅茂海.车辆工程[M].北京:中国铁道出版社,2008.YAN Jun-mao,FU Mao-hai.Vehicle engineering[M].Beijing:China Railway Publishing House,2008.
[5]GB 5599—85,UDC 625.2.001.性能评定和试验鉴定规范[S].GB 5599 - 85,The People's Republic of China national standards the UDC625.2.001 .Railway Vehicles- specification for evaluation the dynamic performance and accreditation test[S].
[6]唐 涛,徐田华,赵 林.列车运行控制系统规范建模与验证[M].北京:中国铁道出版社.2010.TANG Tao,XU Tian-hua ZHAO Lin.Modeling and verification of train control system specification[M].Beijing:China Railway Publishing House,2010.
[7]颜秉善,王其昌.钢轨力学与钢轨伤损[M].成都:西南交通大学出版社,1989.YAN Bing-shan,WANG Qi-chang.Rail mechanics and rail wounds[M].Chengdu:Southwest Jiaotong University Press,1989.
[8]倪文波,王雪梅.高速列车网络与控制技术[M].成都:西南交通大学出版社,2008.NI Wen-bo,WANG Xue-mei.High speed train network and control technology[M].Chengdu:Southwest Jiaotong University Press,2008.
[9]张江泉,许明恒.铁道轮轨曲线侧磨的机理分析及解决方案[J].现代机械,2010(1):35-36.ZHANG Jiang-quan,XU Ming-heng.The mechanism analysis and solving project of the wheel-rail single-side wearing at the curve railways[J].Modern Machinery,2010(1):35 -36.
[10]袁湘鄂.列控车载设备[M].北京:中国铁道出版社,2007.YUAN Xiang-e.Onboard equipments of train control system[M].Beijing:China Railway Publishing House,2007.