交通信号模糊控制器的FPGA设计
2012-08-06宇世雄肖洪祥
宇世雄 肖洪祥
桂林理工大学信息科学与工程学院 广西 541004
0 引言
近年来,随着国民经济的发展和人民生活水平的日益提高,导致了交通量的急剧增长。交通灯作为城市交通监管系统的重要组成部分,对于保证机动车辆的安全运行,维持城市道路的顺畅起到了重要作用。目前很多城市交叉路口的交通灯使用的是定时控制,灯亮的时间是预先设定好的,一定程度上造成了交通资源的浪费。本设计通过FPGA的相关技术,根据检测出等待车辆和通行车辆的数目,运用模糊控制算法,合理的调整灯亮时间。
1 系统的总体设计
交通灯控制系统原理图如图1所示,该系统包括模糊控制模块、分频模块、控制模块、数码管显示模块、LED显示模块。其中模糊控制模块的主要作用是将外部传感器发送的通行车辆P和等待车辆W,经过模糊控制算法得到最佳红绿灯时间,通过使用verilog语言设计一个LUT查找表将模糊控制输出表的数据输入到LUT查找表中,把检测到的等待车辆W和通行车辆P作为查找表的两个查询变量,通过查表把最佳绿灯时间发送出去。分频模块主要将系统输入的基准时钟信号转换为1Hz的激励信号,驱动控制模块工作。控制模块控制交通灯亮灭时间,并将灯亮时间以倒计时的形式通过数码管显示出来。

图1 交通灯控制系统原理图
2 主要功能模块设计
2.1 分频模块
本设计的基准时钟采取的是ASK2CB开发板上时钟频率为50MHz的时钟, 分频模块采用计数的方法对基准时钟进行分频,当检测到时钟上升沿到来时,计数器自动加1,当计数器计数到50M时,发出一个高脉冲,同时使计数器清零。
2.2 控制模块
该系统的交通灯共有4个状态,由于每个状态所持续的时间不一样,所以控制模块的核心部分是状态机和定时器,状态机根据定时器的定时作用完成交通灯的状态转换。如表1交通灯控制要求所示,当东西方向红灯亮,南北方向绿灯亮时,绿灯持续时间为T1,当东西方向红灯亮,南北方向黄灯亮时,黄灯持续时间为3s,当南北方向红灯亮,东西方向绿灯亮时,绿灯持续时间为T2,当南北方向红灯亮,东西方向黄灯亮时,黄灯持续时间为3s。由于检测器检测到的等待车辆W和通行车辆P随着时间的不同而不同,所以由模糊控制模块产生的绿灯时间也随着时间的不同而不同。状态转移图如图2所示,控制模块根据当前交通灯状态和定时器状态判断下一个交通灯状态。当定时器倒计时为0时,交通灯状态改变,否则交通灯保持原有状态。
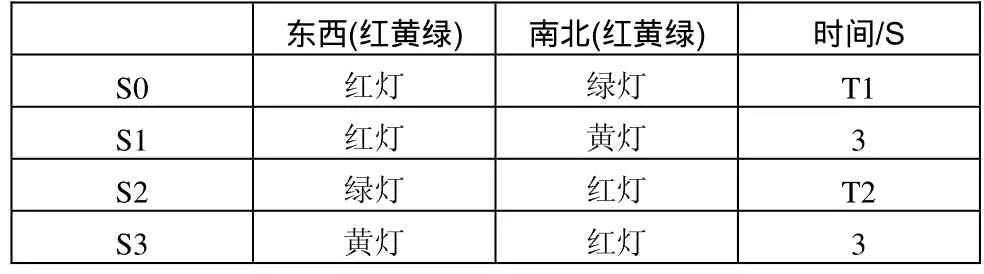
表1 交通灯控制要求

图2 状态转移图
2.3 模糊控制模块
2.3.1 输入输出量及模糊化
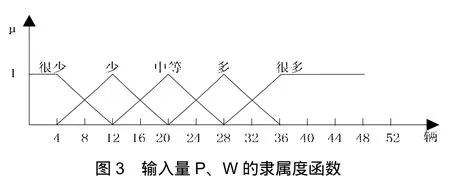
本设计的输入量为交叉路口处的等待车辆W和通行车辆P,在十字路口的四个方向的停止线处以及距停止线100处各安置一个传感器来检测采集绿灯方向和红灯方向未通过路口的车辆数。假设车长为2米,所以设检测器最多只能检测到50辆车,取等待车辆W和通行车辆P的论域为[0,52],其模糊子集为很少,少,中等,多,很多,隶属度函数设计如图3所示。
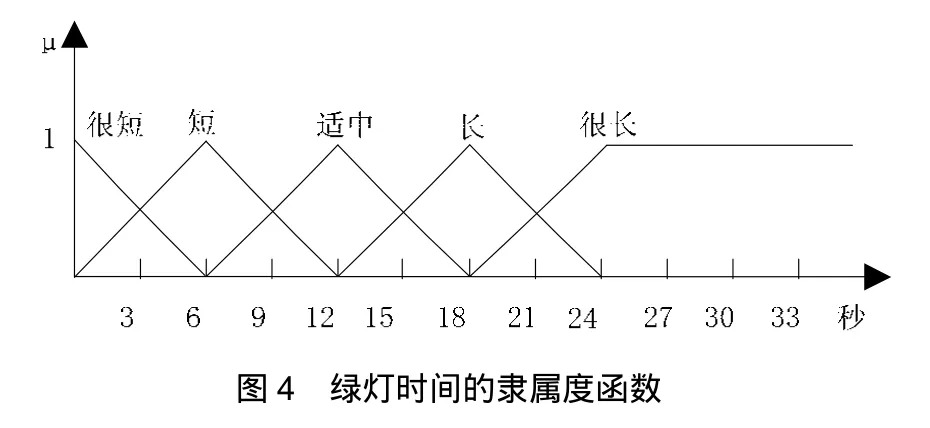
输出量为各个相位的通行方向的绿灯时间T。如果检测到有车,为了保证车辆通过路口而不影响交通安全,则设每个相位的最短绿灯时间tmin=15s;如果没有检测到车,则tmin=0s。各相位的绿灯时间t为最短绿灯时间tmin和模糊控制时间T之和,即t=T+tmin。取T的论域为[0,52],其模糊子集为很长,长,适中,短,很短,隶属度函数设计如图4所示。
2.3.2 模糊规则的设计
模糊控制器的核心部分是模糊控制规则,模糊控制规则是模糊推理的基础。根据交警的经验,当通行车辆P和等待车辆W相同时,输出绿灯时间为短,使不同方向上的车辆快速均衡的通过交叉口,以达到加速相位循环的目的,如表2所示,表中一共包含了25条模糊条件语句。
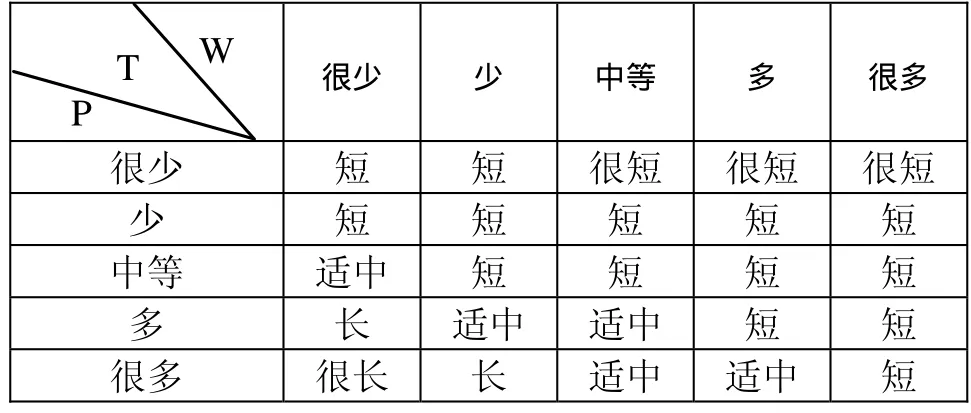
表2 模糊控制规则
本设计采用双输入单输出的模糊规则设计,其控制规则可以表示为:
If Piand Wjthen Tij,其中Pi、Wj、Tij分别表示语言变量。
2.3.3 模糊推理及其去模糊化
根据表2模糊控制规则,可以得出等待车辆W、通行车辆P和绿灯时间T的模糊关系:

运用模糊逻辑运算,也就是隶属度函数的运算,选取模糊逻辑蕴含为最小运算,其隶属度函数为:

对于具有相同论域U的有限集Pi和Wj,则Pi×Wj的论域也是U,其隶属度函数μPi×Wj为:

由Pi、Wj、Tij以及式(2)、(3),得到模糊关系矩阵R=[μ Rij],根据模糊合成关系式:

运用max-min合成运算,将Pi'和Wj'代入(4)可以得出Tij。
常用的输出信息去模糊判决有以下三种方法:
(1) 最大隶属度法;
(2) 中位数法;
(3) 加权平均法。
本文采用最大隶属度法进行模糊判决,得到如表3所示输出量T的清晰值。

表3 模糊控制输出
由表可以看出,当通行车辆P大于等待车辆W时,绿灯时间设置较长,达到了最大限度放行当前相位车辆的目的;当通行车辆P小于等待车辆W时,绿灯时间设置短,以减少等待车辆的等待时间,减少了交通资源的浪费,当通行车辆P等于等待车辆W时,绿灯时间短,达到了加速循环的目的。
3 仿真与结果
利用QuartusⅡ 9.0仿真工具,对系统进行仿真,仿真图如图5所示。

图5 系统整体仿真结果
设置CLK时钟为系统基准时钟50MHz,rst复位信号为高电平,din_p和din_w分别为车辆通行数和等待车辆数,设定为0到52的8位的随机数,t为通过查找表输出的红绿灯时间,通过输出led的6位数据来控制两个方向的交通灯,ew_dout,sn_dout分别为等待相位和通行相位的数码管输入数据。
4 结束语
本文针对交叉路口传统的红绿灯定时控制方式,提出了一种基于模糊控制的交通灯控制器,与传统的定时控制的交通灯相比,模糊控制器可以根据交叉路口的交通特点灵活的设置绿灯时间,减少了交通资源的浪费。此外,系统采用FPGA为核心的控制器,具有设计方便、修改容易等特点,减少了大量布局布线。
[1] 李静.单交叉口交通灯信号模糊控制及其仿真[J].微计算机信息.2006.
[2] 张海英,余臻,陈燕萍.模糊控制在智能交通灯监控系统中的应用[J].计算机技术与发展.2008.
[3] 王永鼎,聂莉娜.基于模糊控制的智能竞速车舵机转向系统设计[J].伺服控制.2010.
[4] 李自成.单交叉口交通信号灯模糊控制系统的研究与实现[J].阜阳师范学院学报:自然科学版.2010.
[5] 卫小伟,常博.一种城市单路口交通两级模糊控制方法[J].电子设计工程.2010.