采用电磁缓速制动器的汽车滑移率计算模型
2012-08-01王文辉
王文辉
(武汉理工大学机电工程学院,湖北 武汉 430070)
1 汽车电磁缓速器机械结构和工作原理
随着我国道路条件的不断改善和车辆动力性能的不断提高,车辆的行驶速度也越来越快。而对于需要频繁制动的车辆尤其对城市内的公交车,长期跑山路的长途客车、卡车等中重型车辆来说,如果制动负荷全部由车辆自身的制动系统承担,由于制动装置的摩擦系数减少,磨损增加,不但可能会造成制动性能下降,更可能因为频繁制动导致制动失效引发安全事故。电磁缓速制动器作为一种辅助制动系统的重要方式,正被广泛应用在大型车辆上。它利用电磁感应原理,将汽车运动的动能转化为涡电流的电能并以热量的形式散发掉,从而减缓车辆的行驶速度,增强车辆的可靠性和安全性[1-2]。
汽车电磁缓速器机械结构主要由定子、转子及固定支架等部件组成(如图1所示)。
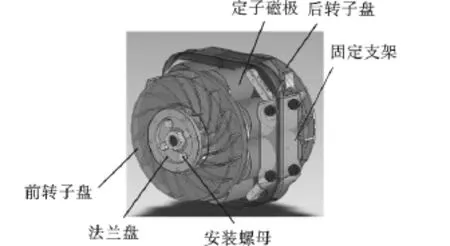
图1 汽车电磁缓速制动器的机械结构
转子通常由前、后转子盘和转子轴构成。前、后转子盘均为圆环状,用导磁性能高且剩磁率低的铁磁材料制成,常选用电工纯铁或低碳钢等材料。定子一般通过固定支架安装在汽车车架(汽车底盘或驱动桥的主减速器外壳)上,两者呈刚性联接,相对于车架,定子是固定不动的。工作原理为:根据电磁场原理,电磁缓速制动器的励磁线圈通电后产生磁场,磁场的磁力线在定子磁极、气隙和前后转子盘之间构成回路。根据楞次定律,当转子随转动轴转动时,其内部无数个闭合导线所包围的面积内的磁通量会发生周期性变化,从而在转子盘内部产生涡电流(简称涡流)。涡流产生后,转子内部涡电流所产生的磁场就会对带电的转子盘产生与其转动方向相反的制动力矩,使转动轴减速(如图2所示)。涡电流有两方面作用:一是在电磁缓速器减速过程中,涡电流在具有一定电阻的转子内部流动时会产生热效应而使制动能量转化为热能,并通过转子盘上的叶片产生的风力将热量迅速散发到大气中;二是根据楞次定律,涡电流产生新磁场在闭合导线回路中所产生的感应电流总是阻止、反抗转子的转动,这样就形成了迫使车辆降低速度的制动力矩[3-4]。
2 滑移率的计算模型
汽车滑移率(S)反映了汽车轮速与车轮中心的线速度之间的相对滑移,是车轮运动中滑动成分所占的比例[5]。汽车在整个制动过程中主要分为3个阶段:第一阶段由于制动力比较小还没有起到制动作用,车轮处于纯滚动阶段;第二阶段随着制动力的不断增大,车轮处于边滚动边滑动阶段;第三阶段为制动力达到最大,车轮抱死的纯滑动阶段。因此滑移率也体现了汽车在制动过程中,滑移多少的物理量。当S=0时,车辆为纯滚动阶段;当0<S<100%时,车辆处于边滚动边滑动阶段;当S=100%时,车辆处于纯滑动阶段。

图2 电磁缓速制动器的制动力矩和涡电流
滑移率的计算公式如下[6]:
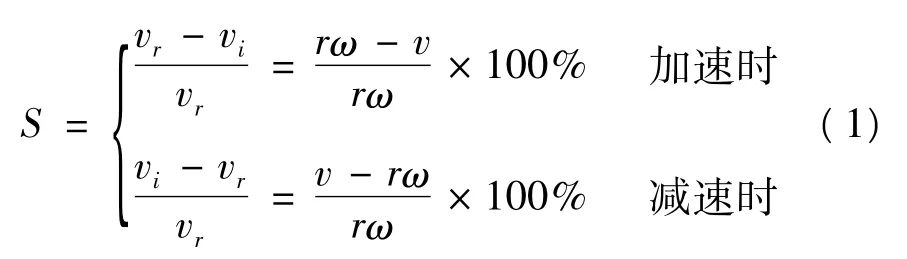
式中:vi为第i个车轮中心的线速度,近似等于车速v;vr为车轮的切向速度vr=rω;r为车轮滚动半径;ω为车轮角速度。
采用电磁缓速制动器的汽车车轮受力情况,如图3所示。图3中,Td为汽车驱动力作用于车轮上的扭矩;Tb为制动扭矩;Te为电磁缓速制动器作用在轮上的扭矩;r为车轮滚动半径;J为车轮绕回转轴线的转动惯量;FX2为地面摩擦力。在忽略空气阻力和轮胎滚动阻力的情况下,假定汽车在平坦的地面上行驶,则由牛顿第二定律可知,车轮运动方程为[7]:
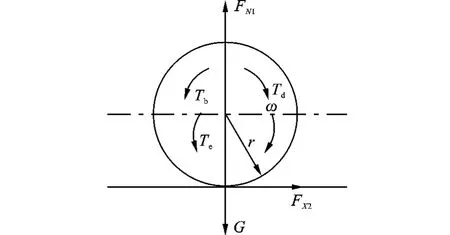
图3 汽车后轮受力图

因此可得车轮制动时滑移率动态方程[8]:

由式(2)和式(3),可得:

即:
根据式(1)和式(5)用Matlab中的Simulink模块建立滑移率仿真模型如图4所示。
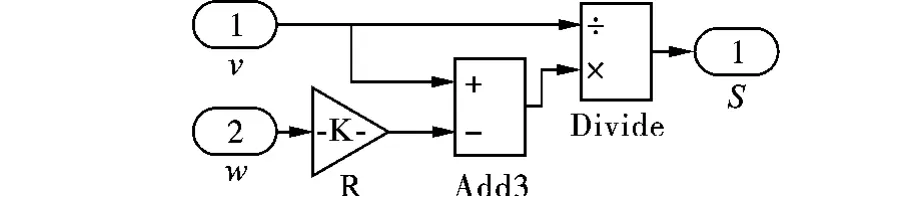
图4 滑移率仿真模型
模型中R模块功能为求一阶导数,Add3和Divide模块分别完成加减和乘除运算。以某型号汽车为例,分别对其使用电磁缓速制动器和不使用该缓速制动器的制动过程进行仿真(不带ABS),其仿真的参数如表1所示。
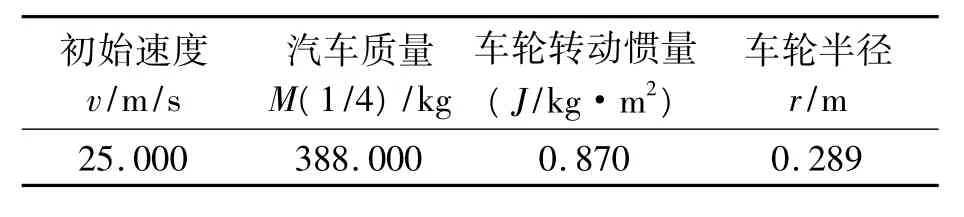
表1 某汽车的仿真数据
在不带ABS的情况下,用Simulink计算模块进行仿真,其仿真结果如图5所示。
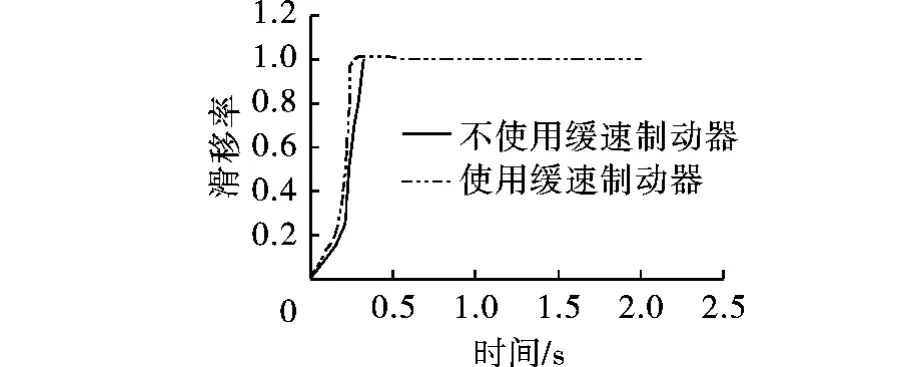
图5 滑移率变化曲线
从图5中可以看出,在汽车制动过程中使用电磁缓速制动器会使汽车车轮提前抱死,滑移率提前达到100%,汽车纯滑动时间增长,其结果容易导致汽车制动过程不稳定,危险系数增加[9-10]。

式(6)反映了制动临界情况下滑移率与地面附着系数的关系。仿真结果如图6所示。
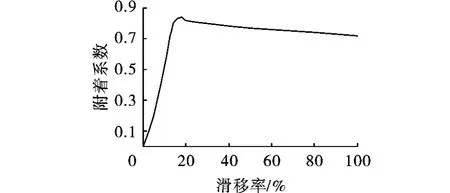
图6 滑移率与地面附着系数的关系
从图6中可以看出,当15% <S<20%时,附着系数出现峰值,此时制动中的汽车处于边滚动边滑动状态,当S=100%时,汽车处于滑动状态,此时的附着系数小于边滚边滑时的附着系数,这种差别在干燥路面上不是很明显,在湿滑路面上差别较大。因此汽车在制动时滑移率保持在15%<S<20%的范围,可达到最佳的制动效果。
3 结论
在汽车制动滑移率计算公式的基础上得出了当电磁缓速制动器工作时的车轮制动滑移率动态方程,并与不使用缓速制动器车轮的滑移率进行比较。在对临界状态下的滑移率和地面附着系数进行分析的基础上,找到了制动效果最佳时滑移率的范围,为汽车制动的最佳控制奠定了基础。
[1] 吴迎峰.汽车电磁缓速制动器的基础理论研究[D].武汉:武汉理工大学图书馆,2007.
[2] 刘增刚.电涡流缓速器的发展及应用[J].交通世界,2004(5):64-67.
[3] 赵长利.汽车制动性能及其统计特征研究[D].济南:山东科技大学图书馆,2005.
[4] 赵迎生,何仁,王永涛,等.利用电涡流缓速器调节车辆制动稳定性[J].江苏大学学报:自然科学版,2007,28(4):309 -911.
[5] DANIEL D E,PENG H.Vehicle dynamics control with rollover prevention for articulated heavy trucks[C]∥5th Int'l Symposlum on Advanced Vehicle Control.[S.l.]:[s.n.],2000:224 -241.
[6] 何仁,王永涛,赵迎生.汽车联合制动系统的性能仿真分析[J].兵工学报,2007(28):1153-1158.
[7] TANKUT A.Nonlinear optimal integrated vehicle control using individual braking torque and steering angle with on-line control allocation by using state-dependent riccati equation technique[J].Vehicle System Dynamics,2009,47(2):155 -177.
[8] 于翔鹏.混合电动汽车制动系统的控制技术研究[D].武汉:武汉理工大学图书馆,2009.
[9] 哈尔滨工业大学电机研究所.涡流测功机[M].哈尔滨:黑龙江科学技术出版社,1993:41-55.
[10] 黄榕清,李刚营,胡宏.液力缓速器和电涡流缓速器[J].机电工程技术,2005,34(10):75-78.
