基于ADAMS的五自由度焊接机械手运动学分析
2012-08-01张文君
王 姣,张文君
(武汉理工大学机电工程学院,湖北 武汉 430070)
焊接机械手在高质、高效的焊接生产中,发挥了极其重要的作用,它将操作人员从繁重、单调、重复的体力劳动中解放出来。这不仅大大提高了生产效率,同时也极大地提高了产品的加工精度和产品质量。
由于机械手是多自由度、多连杆空间机构,其运动学问题十分复杂,计算工作量大。借助目前应用比较广泛的虚拟样机技术软件ADAMS对五自由度焊接机械手进行分析可以大大减少工作量[1]。机械手的各运动学性能通过仿真动画和数据图表可以直观地展现出来,较好地解决了机械手研发过程中出现的问题。
1 作业要求
珍珠岩夹心板因其质轻、耐火和节能环保等优点,正逐步取代传统的墙体材料成为市场的主流[2]。在传统生产过程中,钢丝网架的焊接作业由人来完成,为提高生产效率和自动化水平,笔者设计了钢丝网架焊接机械手。焊接机械手的焊接作业定义在空间直角坐标系中,焊枪的自转对作业没有意义,描述焊枪的位置需要3个独立参数x、y、z,而确定焊枪的姿态则需两个独立参数。因此,用机械手实现焊枪的位置至少需要5个自由度。腰部、肩部、肘部的3个自由度实现焊枪的位置,手腕的两个自由度实现焊枪的姿态[3]。焊接作业要求焊钳在各焊点处精确地定位,而对如何从某焊点运动到另一焊点没有限制。根据各焊点在空间直角坐标系中的位姿求得相应的关节转角后,可在关节空间规划点到点的运动。
笔者研究的五自由度焊接机械手主要由底座、大臂、小臂、手腕和手等部分组成,各部分之间的链接主要由腰关节、肩关节、肘关节和两个腕关节实现。5个关节均为旋转关节,分别安装步进驱动电机,带动整个机械手的各个杆件的相互运动,以实现末端焊接机械手的焊接功能。利用Pro/E三维建模软件针对钢丝网架现场的生产参数所建立的焊接机械手三维模型如图1所示。
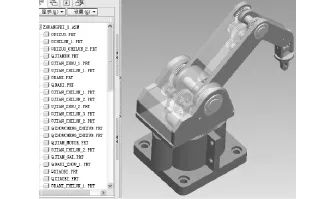
图1 五自由度机械手三维图
2 运动学模型的建立
2.1 五自由度机械手连杆坐标系
机械手主杆件的尺寸是根据实际焊接板材(即机械手要完成的工作空间)的参数确定的,它既要达到焊接板材的最远点,又要达到焊接板材的最近点。利用罚函数法,建立目标函数,进行有约束的非线性规划求解可以得到主杆件的尺寸。根据D-H(denavit&hartenberg)方法,建立基座坐标系并在每个连杆上建立各杆件坐标系[4],如图2所示。
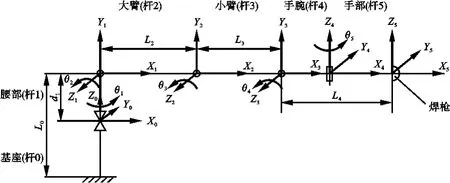
图2 五自由度机械手连杆坐标系
图2中,θ1为腰部回转自由度,θ2为大臂俯仰自由度,θ3为小臂俯仰自由度,θ4为腕关节俯仰自由度,θ5为腕关节摆动自由度;L0为肩高,L2为大臂长度,L3为小臂长度,L4为腕关节中心到焊枪末端的距离。各连杆及关节的参数如表1所示。
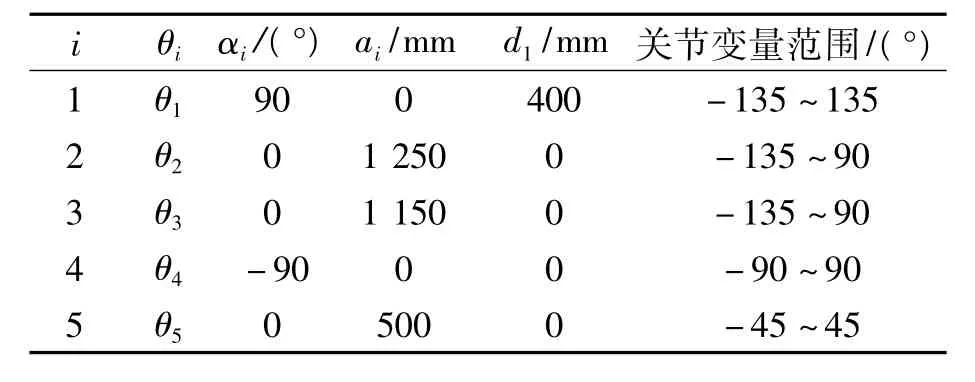
表1 D-H参数表
2.2 运动学正解
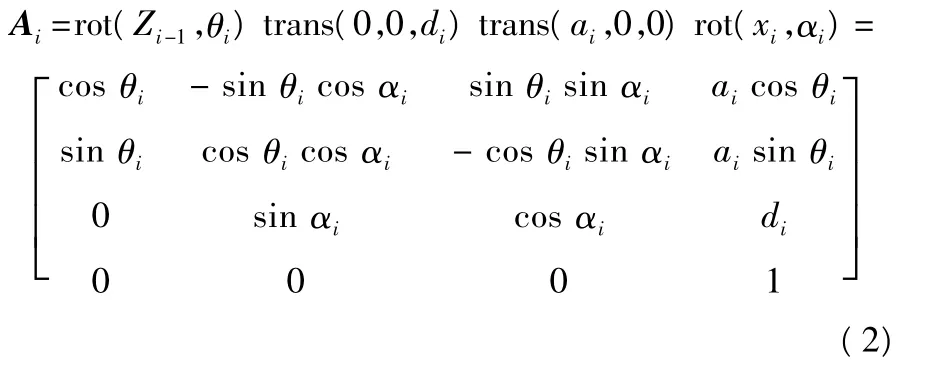
机器人正向运动学主要解决机器人运动学方程的建立以及手部位姿的求解问题。对于五自由度的焊接机器人而言,设定其姿态坐标系与机械手末端坐标系的方向一致,按各关节轴线平行或正交的特点,可得机械手末端执行器的姿态坐标变换方程(简称为位姿方程)为[5]:

其中,A1、A2、A3、A4、A5各矩阵为第 i+1 个连杆相对于第i个连杆的齐次变换。
将表1中的各个参数代入式(2),通过Matlab编程计算,可得出以θ1~θ5为变量的运动学方程。
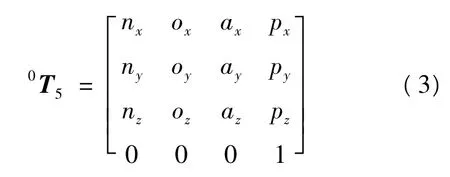
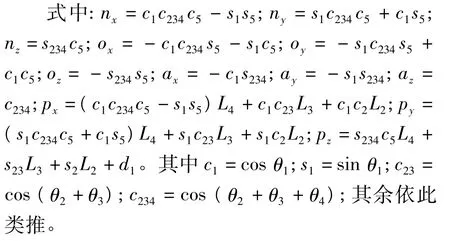
由式(3)可知,当机械手各杆件的几何尺寸参数给定后,根据已知各个关节的变量θ1~θ5,可求出机械手手部的位姿,即手臂末端执行器的位置和姿态,且解是唯一的。
2.3 运动学逆解
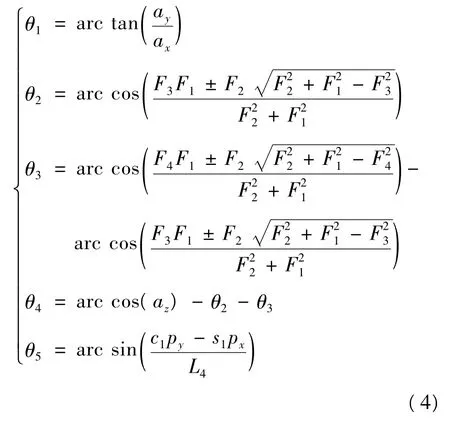
在实际应用中,由于运动控制的需要,往往碰到与此相反的问题:已知要满足某种特定的工作要求,给定末端执行器位置和姿态以及各杆的结构参数,求解对应的关节运动量,这个过程称为运动学逆解。
运动学逆解是机械手控制的关键环节之一。只有各关节移动(或转动)逆解中的值,才能使末端执行器达到工作所要求的位置和姿态。机器人运动学逆问题的求解可采用A-1i左乘矩阵0T5解耦,可在Matlab中用矩阵求解。
式中,F1、F2、F3、F4分别为:
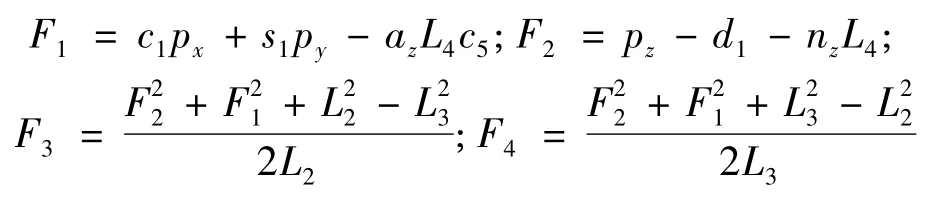
通过式(4)求解 θ2、θ3时,分别出现了两个解,即对应于机械手末端执行器的1个位姿点,有可能出现4组解。但由于机械手结构的限制(主要是关节活动范围以及奇异位姿的限制),这4组解不一定都是可行且最优的。实际应用中取哪一组应根据情况而定。对于运动学逆解,往往具有多重解,也可能不存在解[6]。
3 ADAMS仿真
ADAMS软件具有强大的动力学解算器,但是三维实体建模功能却比较薄弱。对于比较复杂的零件,常采用具有强大三维实体造型功能软件如Pro/E等,进行实体建模后把模型直接导入到ADAMS中去,再利用ADAMS/View对模型进行运动学或动力学仿真[7]。但是这种方法也有其弊端,不能进行参数化计算,不能方便修改构件的几何尺寸。因此笔者将机械手的模型做了适当简化,直接在ADAMS中建模[8],在机械手的底座上添加了固定副,在腰部、肩部和肘部各添加一个转动副,腕部添加两个转动副[9],其模型界面图如图3所示。

图3 添加约束和驱动的模型界面图
在现场焊接钢丝网架时,由于轨迹的限制,机械手运动的控制需要编程来实现,5个转动副旋转的先后顺序不同。在ADAMS中设置旋转运动的角速度为30 rad/s,仿真结果如图4~图7所示,分别为肩关节的角速度-时间、扭矩-时间、角加速度-时间和肘关节的扭矩-时间图[10]。
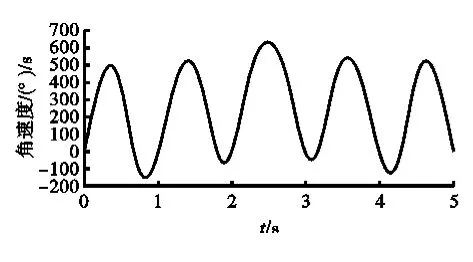
图4 肩关节的角速度-时间图
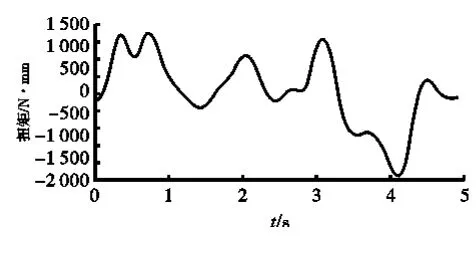
图5 肩关节的扭矩-时间图
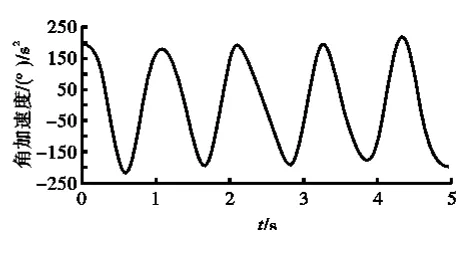
图6 肩关节的角加速度-时间图
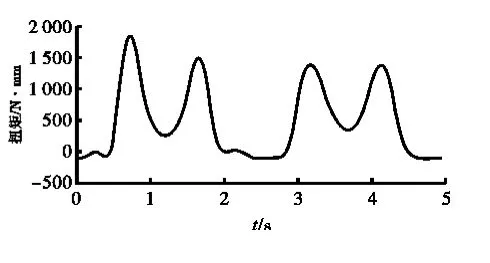
图7 肘关节的扭矩-时间图
4 结论
在仿真运动过程中,腰关节、肩关节和肘关节的旋转可以到达所需位置,满足工作轨迹要求;腕关节的回转运动、俯仰运动对手部位姿的调整可行,各关节角速度变化较平稳,可以满足现场钢丝网架生产的工作要求。此次运动学仿真分析为后期焊接机械手物理样机的设计与实现提供了一定的参考依据。
[1] 王国强,张进平,马若丁.虚拟样机技术及其在ADAMS上的实践[M].西安:西北工业大学出版社,2002:14-36.
[2] 胡正义.桁架片搬运机械手优化设计及计算机仿真[D].武汉:武汉理工大学图书馆,2007.
[3] 谢存禧,李琳.空间机构设计与应用创新[M].北京:机械工业出版社,2007:177-180.
[4] 蒋文平.五自由度串联型机械手运动轨迹多目标优化[D].武汉:武汉理工大学图书馆,2009.
[5] 谷鸣宇.六自由度机械手运动学、动力学分析及计算机仿真[D].长春:吉林大学图书馆,2005.
[6] 刘宏伟.基于ADAMS的五自由度机器人运动学仿真[J].机电产品开发与创新,2008,21(6):42 -44.
[7] 张海平,孔庆忠.基于Pro/E和ADAMS五自由度机械手的运动学分析及仿真[J].电气与自动化,2009,38(2):149 -152.
[8] 李坤,杨家军.五自由度焊接机械手的运动学研究[J].机械工程师,2007(4):20 -21.
[9] 熊震宇,陈焕明,葛杨.基于ADAMS的弧焊机器人运动仿真[J].计算机工程与应用,2005(11):166-167.
[10] 程小东,钱奕桂,杨璞.基于jQuery的动态虚拟场景技术研究[J].武汉理工大学学报:信息与管理工程版,2010,32(6):922 -925.
[11] 郭柏林,胡正义.基于ADAMS的搬运机械手轨迹规划与仿真[J].湖北工业大学学报,2007,22(4):37-39.
