基于PIC16F886的无刷直流电机控制器的设计*
2012-07-31邓方雄
邓方雄,汪 洋
(湖北科技学院,湖北 咸宁 437100)
无刷直流电机(brushless DCmotor)由于结构简单、出力大和良好的调速性能,在工业领域中得到了日益广泛的应用[1].无刷直流电机的这个特性正好满足电动汽车的运行需要,目前大功率车用无刷直流电机的使用还不是很普遍,但中小功率的无刷直流电机已经广泛应用于电动摩托车,小型旅游观光车等功率需要较小的车型上.无刷直流电机的控制不像有刷直流电机控制简单,无刷直流电机的控制驱动器大量使用了大功率的电力电子元件,这些大功率的电子元件需要可靠的控制才能够稳定地工作,同时还需要很完善的保护电路,保证控制驱动器在极端情况下也不易损坏.目前有很多的研究人员对无刷直流电机的驱动器进行了研究,设计了很多控制电路,控制软件,产生了很多的控制算法.常用的有 PID控制算法,模糊控制算法等[2~3].本文设计了一种额定电压48V,额定功率5KW 的无刷直流电机控制驱动器,这个控制器采用模糊自适应控制算法,经过试验,达到了预期的效果.
1 驱动控制器硬件电路设计
1.1 驱动控制器总体设计
无刷直流电机驱动控制器的总体框图如图1所示,驱动控制器以PIC16F886微控制器为核心.PIC16F886是美国微芯公司生产的一种新型低价格高性能的微处理器,本控制器工作温度范围宽,抗干扰性能好,并自带多路10位模数转换器和多个外部中断源,具有10位分辨率的PWM驱动引脚,这些特性能够满足无刷直流电机驱动控制的处理精度和处理速度要求.
本控制系统驱动的无刷直流电机自身具有霍尔元件,能够对转子的位置进行检测,霍尔元件输出的信号还可以用于速度的检测.本设计选用的无刷直流电机额定工作电压为DC48V,额定功率为5KW.

图1 驱动控制器总体框图
1.2 系统供电电路
无刷直流电机驱动控制器的供电采用48V的铅酸蓄电池组供电,控制系统需要15V的直流电源为功率场效应管驱动电路供电和5V直流电源为控制系统中的微控制器供电.本设计采用耐高压的LM2576HV进行48V到15V的转变,LM2576是一种开关型电源转换芯片,能够承受3A的额定电流,自身功耗极小,能够满足本控制系统的要求.由于以微控制器为主的电路功耗较小,所以采用线性稳压芯片LM7805将15V直流电源转换为5V直流电源.供电电路如图2所示.
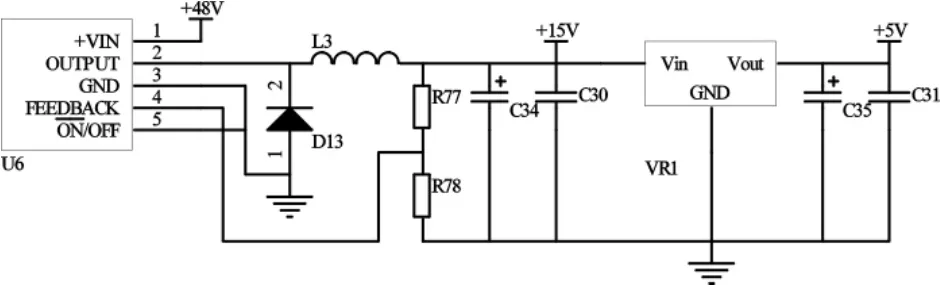
图2 系统供电电路
1.3 控制器核心电路
以PIC16F886微控制器为核心的控制电路如图3所示.图中运放选用型号为LM358,这片芯片中包含有两个独立的可以单电源供电的运放A和运放B.图中运放A工作在比较器方式,反向输入端为一个经过分压电阻获得的稳定电压,同向输入端为主电路中的电流反馈对应的电压信号,当电流反馈值大于设定值后,运放输出高电平,这个高电平会关闭功率场效应管的驱动电路,避免场效应管因过流而损坏.同时该信号还被微控制器的中断接收,微控制器在接收到该信号后,会在程序内关闭所有的输出,并给出过流的报警信号.

图3 驱动控制器核心电路
运放B工作在同向放大方式,经主电路中电阻分流器反馈的电流信号经过必要的滤波后进行放大,输入到微处理器的引脚,经过微处理器的模数转换后获取的数字信号作为程序控制的依据.
图中一个五脚接头接收电机霍尔元件位置传感器输出的脉冲信号,微控制器根据脉冲频率直接获取无刷直流电机的转速和转子的位置信息.微控制器根据位置信息输出相应的控制信号对主电路的开关管进行开关控制,控制信号波形如图4所示.图中微控制器输出的共有六个信号,从图中所示的波形可以看出,每个信号在一个周期中有1/3的时间输出高电平,2/3的时间输出低电平.LIN1,LIN2,LIN3都为场效应管组下桥臂的控制信号,这三个信号的相位依次相差120度电角度[4].
HIN1和LIN1两个信号分别接通到同一个桥臂的上下两个场效应管组上,这两个信号不能够同时为高电平,避免因为两个场效应管同时导通导致的同一个桥臂的导通短路.HIN2和LIN2,HIN3和LIN3的原理相同.实际中这六个信号按什么电平的形式出现,由直流电机转子的位置决定,这个位置信号由霍尔元件传感器获得.
为了稳定转速,提高调速的及时性,控制上桥臂开关管的信号采用脉宽调制,控制下桥臂的开关管不采用脉宽调制.工作过程中可以根据无刷直流电机位置传感器反馈的位置信号,有规律的控制开关管的导通与关闭,实现无刷直流电机的正反转.

图4 微控制器控制波形
1.4 电机控制器主电路设计

图5 驱动控制器主电路
图5为微控制器的电机驱动主电路.图中功率开关管采用功率场效应管组,场效应管具有通态电阻小,开关速度快的特点.根据电机的额定电压和额定电流的大小,本设计中选用额定电压100V,额定电流70A的场效应管,由于单个场效应管的额定电流不能够满足条件,所以只能够采用多管并联的方式来实现,本设计采用5只管并联的方式来提高导电能力.驱动控制器中采用分流器对主电路中流过的电流进行采样,本设计采用额定电流100A输出电压75mv的康铜分流器,由于分流器输出的采样信号比较微弱,所以经过图3所示的放大电路放大后输送给微控制器和开关管驱动电路.
1.5 开关管驱动电路设计
功率场效应管的驱动电路的好坏直接决定了控制器的可靠性,本设计中采用功率开关管的专用驱动芯片IR2110S驱动.该芯片内部集成了电压自举电路,大大简化了驱动电路的设计.同时该芯片的SD引脚在接收到高电平信号后,关闭所有驱动信号[4],这个特点保证了控制电路能够及时准确的保护开关管.SD引脚连接图3输出的保护信号.开关管的驱动电路如图6所示.

图6 开关管驱动电路
2 驱动控制器控制软件设计
本系统的控制全部由软件实现,软件主要完成的功能为电机的转速、刹车、正反转控制,飞车、欠压、过流保护,还要实现控制器与仪表板的通信等.
2.1 软件控制原理
为了保证无刷直流电机的稳定工作,需要对无刷直流电机进行反馈控制[5~6],本系统采用电流反馈的负反馈控制方式,控制方案如图7所示,控制环给定值为设定电流,反馈值为无刷直流电机的实际电流,给定值与反馈值之间的差值进行PID调节后作为PWM的占空比值.采用电流负反馈可以保证电机在堵转和低速运行时驱动电路元件的安全性.

图7 无刷直流电机控制方框图
2.2 程序控制流程
本控制软件需要完成多个方面的控制,其中最主要的是完成功率场效应管的控制,即给出每个功率管的控制波形.由于PIC16F886控制芯片内部带有功能完备的PWM发生电路,控制软件中只需要给出PWM的占空比即可,具体控制哪几组开关管导通,这个需要根据无刷直流电机的转子位置决定,相应的控制在中断程序中实现,PID调节子程序主要是进行数值PID控制,计算得出需要的占空比值.
控制软件在控制过程中,还要对蓄电池的电压进行实时的监测,当蓄电池的电压低于一定的数值时,需要降低控制过程中的最大电流值,以达到保护蓄电池的目的.控制过程中,控制软件还需要对电流过大的情况作出处理,当占空比设定为最小值后,还有较大的电流,这个时候就出现了过流,需要关断所有的功率开关管,以保护电路.
控制过程中还需要对速度进行测量,速度的测量方法是计算一定时间内,电机转子位置传感器输出脉冲的个数,如果脉冲个数多于电机正常转速对应的个数的时候,说明电机已经出现了超速的现象,需要关闭控制信号的输出.

图8 软件控制流程图
2.3 中断程序设计
PIC16F886控制芯片具有多种中断源,其中本控制软件使用了RB口电平变化中断,定时器0中断,AD转换中断,串行口发送和接收中断.本控制软件中,所有的中断源都设定到一个中断优先级,进入中断系统后,软件会按图9所示的过程依次查询相应的中断标志位,查看中断是否发生,如果中断发生,就执行相应的中断子程序.
RB端口能够测量端口电平的变化,当端口电平变化,说明无刷直流电机的转子已经转到了一个新的位置,微处理器需要根据当前的位置,改变场效应管的导通状态,如图4所示.采用中断处理的好处是能够及时改变场效应管的导通状态,否则,转子磁场方向与定制磁场方向反向,定制电流变大,对场效应管产生冲击,如果长时间接收这种冲击,功率管很容易损坏.

图9 中断程序流程图
3 系统调试和结论

表1 负载测试
从系统的调试数据来看,本控制器能够按照预先的设定对电流对电机进行控制,在设定电流不变,负载不变的情况下,电机的转速比较稳定,这说明,软件在进行PID控制的时候,控制时间和PID的参数选择比较合适.
[1]夏长亮,郭培健,史婷娜,王明超.基于模糊遗传算法的无刷直流电机自适应控[J].中国电机工程学报,2005,(11):129~133.
[2]陈强.无刷直流电机系统的仿真研究[J].现代雷达,2011,(7):56 ~60.
[3]魏海峰,李萍萍,刘国海,贾洪平.基于双电流调节器的无刷直流电机换相转矩脉动抑制[J].江苏大学学报,2010,(6):691 ~695.
[4]纪志成,沈艳霞,薛花.无刷直流电机自适应模糊控制的研究[J].中国电机工程学报,2005,25(3):104~108.
[5]张相军,陈伯时.无刷直流电机控制系统中PWM调制方式对换相转矩脉动的影响[J].电机与控制学报,2003,7(8):87 ~91.
[6]夏长亮,文德,王娟.基于自适应人工神经网络的无刷直流电机换相转矩波动抑制新方法[J].中国电机工程学报,2002,22(1):54 ~57.
