塔机在线无线远程监控系统设计*
2012-07-25宋宇宙
宋宇宙,苏 娟,何 清
(湖南大学电气与信息工程学院,湖南长沙 410082)
0 引言
近年来,塔机安全事故频发,使得加强对塔机的综合管理、实现对塔机的安全监控变得极其重要,塔机监控系统应运而生,其主要作用是对塔机运行过程中的各种工况参数进行实时监测和记录,为安全操作塔机提供重要的依据[1]。塔机运行异常时,能够及时报警,防止事故的发生或扩大;事故发生后则可调取工况参数,分析事故原因。然而,传统的塔机监控系统大多采用有线的方式,一方面由于塔机上面环境复杂,当传感器数目比较多时采用这种方式会使现场的布线、安装、维护困难,同时塔机上运行电机中强电产生的电磁场也会对弱电信号产生很强的干扰。另一方面,相对于塔机用户,塔机制造商对实现塔机强有力监控的愿望更加强烈,除监测塔机的运行参数外,制造商希望在塔机售后的某些情况下仍能保持对塔机的控制,如分期的塔机款项未按时收到,塔机售后出现故障进行远程原因分析等。
针对这一情况,本文提出了一种基于Zig Bee与通用分组无线业务(GPRS)技术的塔机安全远程监控系统的设计方法,本系统从现场数据的采集到远程数据的传输采用纯无线的方式,减少了布线带来的一系列问题[2],将PLC与监控系统“绑定”,利用GPRS技术实现对塔机的远程控制。该系统配备了黑匣子,建立了塔机群在线无线远程监控管理平台,实现了对多台塔机的集中管理,增加了许多塔机管理方面的新功能。
1 系统的总体结构
系统主要由现场数据采集系统、无线远程终端、网络服务器及监控中心等组成,如图1所示。各传感器节点采集各种工况参数,通过Zig Bee网络发送至协调器,协调器对数据进行分析、处理、融合后,通过GPRS远程终端模块打包封装发送至预定IP地址的网络服务器,网络服务器对数据包进行解析确定该分发给哪个监控终端,并将其重新打包发送到指定的端口,监控终端接收数据并存入本地数据库。这是整个监测数据上行传输流向,控制命令的下行传输流向正好与此相反。
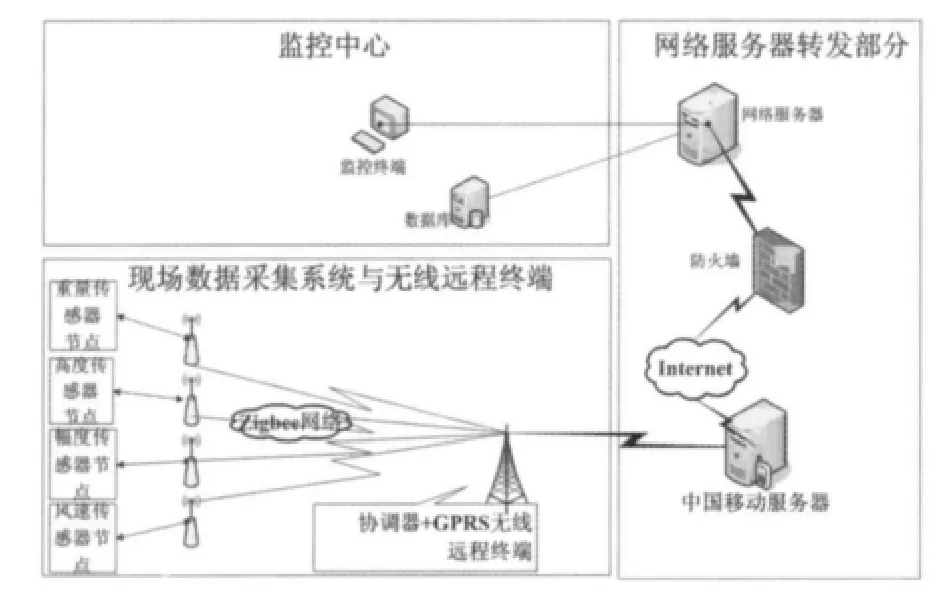
图1 系统整体结构图Fig 1 Structure diagram of whole system
2 现场数据采集系统与无线远程终端的设计
2.1 硬件设计
本部分中传感器节点和协调器节点的微控制器选择TI公司的无线单片机CC2430,GPRS模块采用H7710 GPRS通信模块。为了减轻协调器主控芯片的负担,系统采用P89LV51单片机负责数据存储,采用C8051F120进行GPRS数据收发。
协调器主要任务是接收传感器发送的采集数据,读取时钟芯片的时间,完成数据的计算、融合。为了能适用不同型号的塔机,系统设计了键盘电路以设置系统参数。现场数据采集系统与无线远程终端部分的硬件结构如图2所示。
传感器节点主要用于事件的感知与分组数据的传输[3],主要由数据采集、数据处理、数据通信等组成。塔机运行过程中的工况参数主要有质量、高度、幅度、力矩、风速等,其中,力矩采用直接计算的方法。传感器节点中的传感器采集出来的信号,经RC滤波器处理,AD620差分放大,线性光耦隔离后,再进行A/D转换,然后经CC2430计算处理后由其高频收发模块将数据发送至协调器。其结构如图2(a)所示。
无线监测网络需要维护双向的通信通道[4],系统中的数据大部分都是上行传输,只有当监控终端有控制命令时,才有数据的下行传输。数据上行传输时,485口2处的切换开关接通存储部分,协调器节点收到传感器节点发送的数据,进行数据融合、力矩计算、数据重新打包后,分两路发出,一路经485口1发送至GPRS远程终端部分,并由其发送至网络服务器,进而转发至监控中心监控终端;另一路经485口2选通存储部分的切换开关发送至P89LV51,由其对数据进行解析后,存入FLASH或铁电。所有的485通信均采用MODBUS协议。控制命令下行传输时,485口2处的切换开关接通PLC部分,数据流向为:监控中心监控终端打包—网络服务器进行解析,重新打包—GPRS终端—协调器—PLC。数据下行传输中的每一步都需要确认,以确保控制命令的可靠传输。
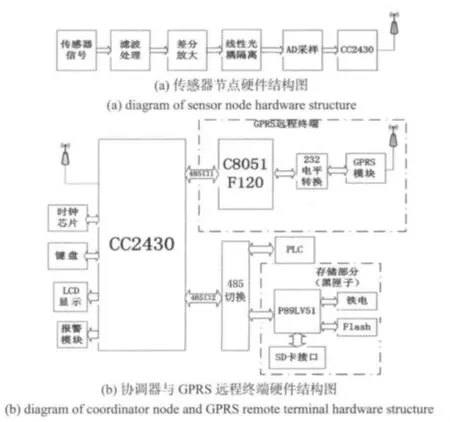
图2 数据采集系统与GPRS远程终端的硬件结构图Fig 2 Diagram of data acquisition system and hardware structure of GPRS remote terminal
系统中的存储部分实现黑匣子功能,如图2(b)所示。内部保存的数据有:实时工况参数、设置数据、质量和力矩过载记录、时间修改记录等。CC2430将要储存的数据通过485口2发送至P89LV51,由其将数据存入铁电或FLASH。由于铁电与FLASH在读写时间与擦写次数上的不同,数据优先存入铁电,当铁电存储数据溢出后,再由P89LV51将铁电数据导入FLASH中,若FLASH存储空间用完,则由前到后进行覆盖,从而保证FLASH存储器中的数据永远是最近的数据。如果用户需要查看这些数据,可以插上SD卡,P89LV51检测到SD卡插入后,启动写 SD卡的操作,将FLASH与铁电中的数据全部导入SD卡,再用上位机软件读取SD卡,实现对黑匣子数据的提取。
2.2 软件设计
软件设计主要分为4个部分:传感器部分、协调器部分、GPRS远程终端部分、存储部分。实际上这里要对PLC实现远程控制还需设计PLC的程序,PLC需要按照MODBUS协议增加相应的控制指令,限于篇幅这里不多详述。
2.2.1 传感器部分软件设计
传感器上电初始化后扫描有效的信道,寻找合适的父节点,通过关联过程加入网络。加入网络后,会将自已的16位短地址发送给协调器,协调器收到后将地址保存起来,以便协调器给传感器节点传输设置参数采用16位短地址进行直接寻址。由于塔机工作环境恶劣,传感器对读取的AD数据采用了去极值平均滤波法的滤波处理,经过计算处理后,传感器将数据发送至协调器。当系统要进行参数设置时,传感器接收协调器发送的设置数据。流程图如图3(a)所示。
2.2.2 协调器部分软件设计
协调器上电后,主动扫描选择一个合适的信道,完成后选择一个PANID。在网络中,协调器的短地址为0x0000[5]。网络建立后,当协调器收到传感器加入网络的请求时,会给该节点分配网络地址[6]。协调器读取时钟芯片数据作为当前系统的实时时间,接收传感器发送来的数据,进行数据处理,然后送LCD显示,并将这些实时数据和过载记录通过485口2送入存储部分。当有设置键按下时,协调器读取按键获得设置值,并将其发送至对应的传感器,同时将这些设置参数送存储保存。当收到控制PLC的命令后,协调器会先“谨慎”地分析当前的工况参数,确定当前的控制操作安全以后才将指令发送给PLC。例如:协调器收到远程关闭塔机的命令,协调器先保存命令然后判断重量参数,当质量小于0.01 t时,协调器才将指令发送至PLC,以确保PLC执行此次指令后塔机的安全。流程图如图3(b)所示。
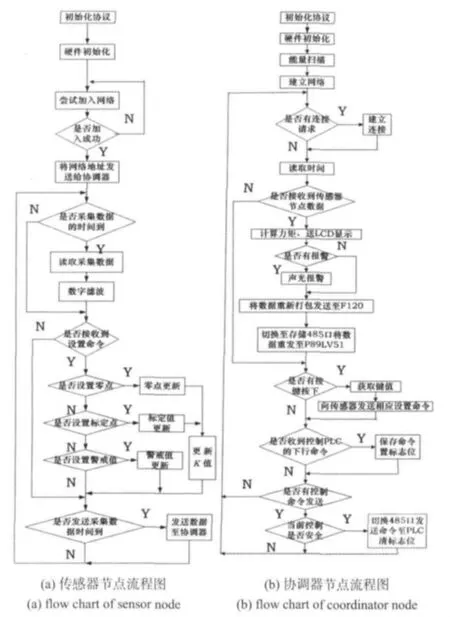
图3 传感器与协调器的流程图Fig 3 Flow chart of sensor node and coordinator node
2.2.3 GPRS远程终端部分软件设计
GPRS远程终端部分的C8051F120的主要任务就是将现场采集的数据通过GPRS模块发送到数据中心。流程图如图4(a)所示。
GPRS模块的功能是将接收到的数字信号转换成GPRS信号,利用移动通信网络将转换成的GPRS信号发送到移动通信数据中心。无线传输终端需要首先设置GPRS模块的各种参数,如传输速率、移动通信中心的各种信息等。GPRS模块正常工作后,会在无线传输终端与移动通信中心之间建立一个完全透明的传输通路,当无线传输终端与数据中心握手连接成功,安全登陆后,无线传输终端才可向数据中心发送数据。为了节省GPRS流量,只有当塔机吊物体和有报警时才上传数据,同时为防止GPRS模块长时间不上传数据而产生“休眠”,系统每20 min上传一个心跳数据包。
2.2.4 存储部分软件设计
存储部分中,当系统检测到有SD卡插入时,系统将所需导出的数据按照预先分配好的地址写入SD卡,然后根据这个分配的地址协议编写读取SD卡的上位机软件,用此上位机软件将数据读出。这样既防止了用户数据被非法读取,又避免了生成复杂的FAT文件系统部分,减轻了单片机的负担,其流程图如图4(b)所示。
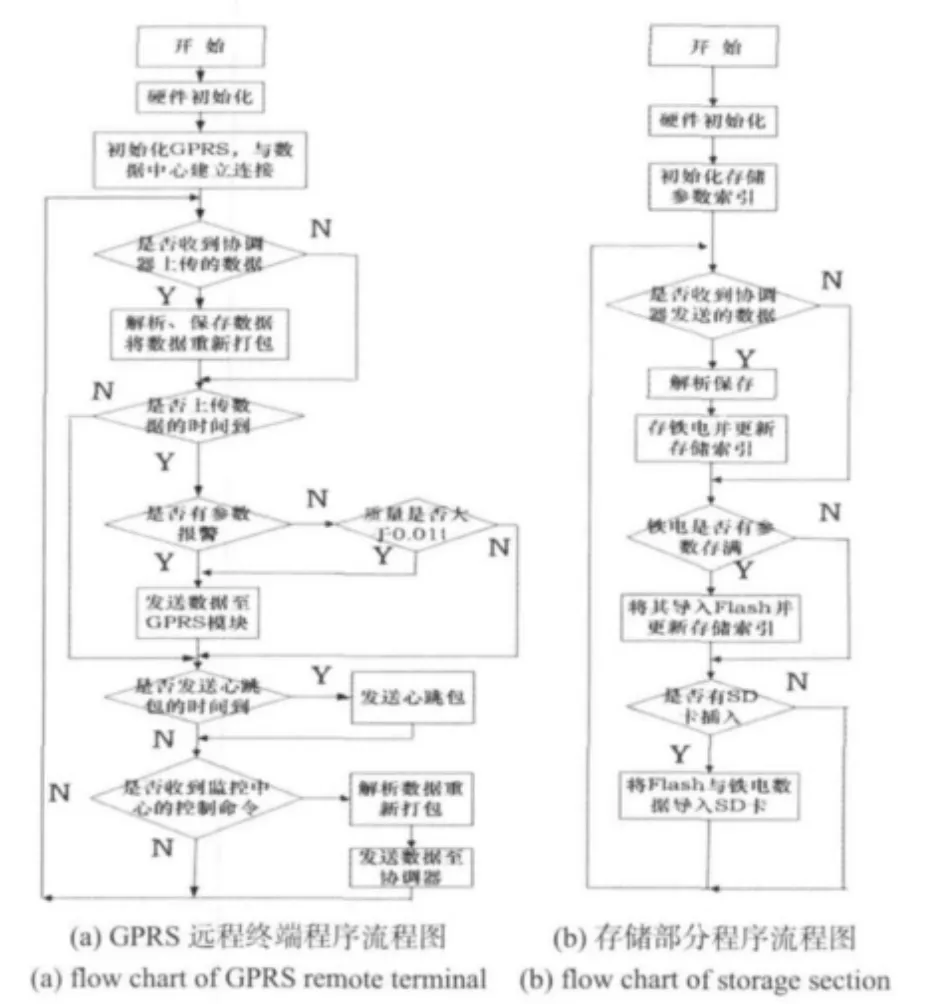
图4 GPRS远程终端与存储的流程图Fig 4 Flow chart of GPRS remote terminal and storage section
3 网络服务器与监控中心客户端软件设计
3.1 网络服务器设计
网络服务器采用安全性相对较高的Linux系统作为服务器的操作系统,主要实现身份的验证和数据的转发,软件主要结构有以下4部分:1)无线终端设备的管理,无线传输模块的添加与删除;2)客户端的管理,客户端的绑定与删除;3)权限管理,根据客户端权限的不同提供不同的数据转发服务;4)日志管理,主要负责记录远程终端设备和客户端的管理、登陆等对服务器进行访问的行为。
远程监控系统中每台GPRS传输模块和监控终端都有一个全球唯一的经过加密的身份编号,网络服务器对每台登陆的设备和监控终端都要进行服务验证,防止非法的设备进入,获取客户数据资料,鉴于中心服务器对整个系统的重要性,中心服务器的安全性至关重要,所以,系统在服务器前端安装硬件防火墙和对一些网络传输数据进行安全加密等技术手段来保障服务器的安全。
3.2 监控中心客户端的设计
监控中心客户端的功能是实现设备的无线远程在线监控,其内容包括:设备管理、设备信息查看管理、用户操作管理。
设备管理主要包括组管理和组属性设置、终端设备管理和组绑定、终端设备信息修改、获取在线终端设备列表等。
设备信息查看管理包括当前设备实时信息的显示,可执行的控制命令、历史信息的查询、历史信息管理。
用户操作管理包括管理员的建立、管理员信息修改、管理员删除。其中,管理员也有权限的不同:高级管理员可以查看、操作、添加用户和分配用户权限;操作员可以进行除用户管理外的其它操作;信息查看员只能查看信息。这样根据不同的用户对象,分配不同的操作命令权限,更有利于塔机的安全管理。
4 测试分析
本实验选在长沙京龙工程机械公司的塔机生产基地,测试Zig Bee网络的传输质量。选用2个节点,1个为传感器节点,1个为协调器节点,传感器节点每300 ms发送一帧给协调器,通过数据分析仪监听数据包,在不同的距离测试出其收包率的结果如图5所示。
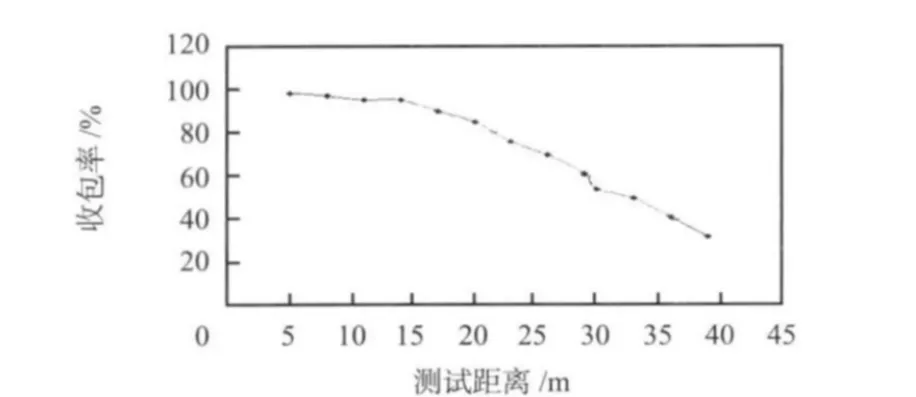
图5 收包率与距离关系曲线Fig 5 Relationship curve between packet receiving rate and distance
图5表明:当传感器与协调器距离增加时,收包率会降低,当两者的距离在15 m以内时,传输效果较好,当两者距离超过30 m时,收包率低于50%,所以,此系统中两节点之间的距离最大为15 m。
以质量为例,对检测精度进行了实验,用塔机吊起已知重量的物体,待物体静止后读出监测值,将此检测值与实际值进行比较,相对误差在5%以内,测试结果如表1所示(此时称重传感器的标定值为2.5 t)。
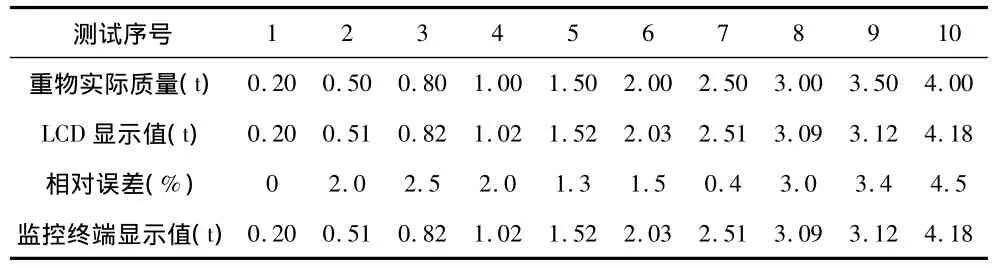
表1 质量参数的实验结果Tab 1 Test result of weight parameters
从表1可以看出:测试的质量在靠近设置零点与标定点附近相对误差最小。当测试质量大于标定值时,超出标定值的部分越大,相对误差也就越大。所以,系统中要根据塔机所能承受的最大吊重,灵活地选取系统的标定值,一般情况,标定值应接近最大吊重。将下位机的数据与监控中心的数据对比,发现数据远程无线传输正确率100%,但通过采集系统与网络服务器的时间对比,发现监控中心的数据有延时,这与GPRS的网络质量有关,测试过程中最大延时小于10 s。
5 结束语
本文将Zig Bee与GPRS两种无线技术相结合,设计了塔机安全监控系统,增加了塔机综合管理方面的新功能,建立了塔机群在线无线远程监控管理平台。实验结果表明:该系统不但实现了对多台塔机的集中管理,而且还可以对塔机运行实施有效的控制,保证了塔机设备的安全正常运行。该系统的设计与应用为进一步进行塔机群防撞系统的研究打下了基础,并大大提升了塔机设备群的远程在线监控水平,这必将为塔机的安全运行做出重大贡献,产生巨大的社会效益和经济效益。
[1]倪建军,韦权伟,白 彬.施工升降机、塔机在线无线远程监测系统介绍[J].建筑机械,2009(4):66-69.
[2]陈娜娜,周益明,徐海圣,等.基于GPRS的水产养殖环境无线监控系统的设计[J].传感器与微系统,2011,30(3):108-110.
[3]高传善,杨 珉,毛迪林.无线传感器网络路由协议研究综述[J].世界科技研究与发展,2005,8(3):1-8.
[4]孙志远,韩 炜.Zig Bee技术在振动监测中的应用[J].传感器与微系统,2009,28(10):114 -116.
[5]王明合,王立华.基于Zig Bee的无线温度传感器网络设计[J].微计算机信息,2010,26(7):68 -70.
[6]龚发根,汪 炜,秦 拯.基于Zig Bee的无线温度传感器网络的工业废气监控系统[J].传感器与微系统,2011,30(1):86-89.
