影像与LiDAR数据信息融合复杂场景下的道路自动提取
2012-07-25李怡静胡翔云张剑清江万寿张永军
李怡静,胡翔云,张剑清,江万寿,张永军
1.武汉大学 遥感信息工程学院,湖北 武汉 430079;2.南昌大学 建筑工程学院,江西 南昌 330031;3.武汉大学 测绘遥感信息工程国家重点实验室,湖北 武汉 430079
1 引 言
道路与人们日常生活密切相关,是GIS数据的重要组成部分之一,准确、高精度的道路信息对于城市规划、交通控制以及应急响应等很多行业具有重要的作用。基于影像的道路提取研究一直是近20年遥感领域的重要研究课题,许多策略和算法亦取得了不同程度上的成功。早期的研究多针对中低分辨率遥感影像,道路特征明显,并出现了一些经典的提取算法,如动态规划算法[1-2]、snake及其扩展模型[3-4]等。随着高分辨率遥感影像的广泛应用,加上其提供的丰富信息给提取工作带来的挑战性,使得从高分辨率影像中提取道路成为研究的热点和难点。文献[5]通过面状道路和道路边缘逻辑互运算,利用形状指数获取道路区域;文献[6]同样利用形状特征,结合局部灰度一致性的图像分割进行道路中线提取;文献[7]结合相位编组原理及动态规划法提取道路线段;文献[8—9]利用角度纹理特征提取道路中线;文献[10—11]将形态学用于道路线的提取。但是对于高分辨率影像中的复杂场景,存在大面积的阴影遮挡及细节干扰,仅利用道路的几何和光谱信息提取正确完整的结果异常困难。
LiDAR作为一种高效的空间数据采集技术,其应用在近几年发展迅猛,这使得LiDAR点云的处理和分类研究受到了广泛关注。目前,已有不少学者提出基于LiDAR数据的道路提取策略。如文献[12]提出基于特征约束的道路激光点提取方法,以高程、强度约束道路点云、点密度和区域面积优化结果。文献[13]针对道路路面扫描点特征,结合点云法向量分布特点,提出一种基于法向量模糊聚类的道路点云数据滤波算法。LiDAR技术可以避免阴影和部分遮挡对道路提取的影响,但大量不规则不连续点云却缺乏影像的光谱和语义信息。文献[14]结合LiDAR和高分辨率遥感影像利用hough变换检测带状道路基元,对城区道路中线进行提取,但该方法受限于格网分布的道路;文献[15]在动态规划代价函数中引入LiDAR数据的高程信息,并结合影像提取道路中线,但该方法需人工输入控制点。
相对于地物稀少且道路特征明显的乡村地区,复杂场景多指城市区域,道路周围地物种类、形状繁多,高楼、树木对路面产生遮挡和大面积阴影,这些因素严重影响了提取工作,且高分辨率影像中的城市道路含有丰富的细节信息,如汽车、分道线等,加大了道路建模的难度。越来越多的道路提取方法在向多信息、多策略相结合的方向发展,但对于高分辨率影像中的复杂场景,目前少有有效的方法提取道路线。
信息融合是指为完成决策和估计任务而利用计算机技术对按时序获得的若干传感器的观测信息在一定准则下加以自动分析、综合的信息处理过程。基于该思想,本文将LiDAR数据和遥感影像信息融合,自动提取高分辨率影像中复杂场景的道路。具体流程见图1。

图1 结合两种数据的道路提取流程Fig.1 Flow chart of road extraction
2 结合LiDAR和影像的道路模型
道路作为城市中不可缺少的人工地物有其自身特点,主要表现在:道路高程基本等于或略大于地面高程,且表面平坦;道路表面灰度差别小,而道路与周边区域灰度差异较大;道路表面材料均匀,对激光的反射率基本一致;道路都有一定的长度,不会很短且形状平滑等。
这些道路特征分别在LiDAR数据与高分辨率遥感影像上有不同体现:道路高程近似等于地面高程,而高于地表面的建筑物和树木可以通过点云滤波区分,尤其是部分光谱特性与道路极为相似的建筑物屋顶,在遥感影像上会产生异物同谱现象,而在LiDAR数据中表现为高程差异较大的点云,可较好地分离;道路路面平坦连续,打在路面的激光点云高程变化率较小近似平面;LiDAR数据的多次回波,可获取部分被遮挡路面点云,强度信息亦是区分植被、路面等不同材质地物的有效途径,且不受复杂场景中阴影的干扰;高分辨率遥感影像含有道路的丰富光谱信息和细节变化,相对于噪声较大的强度数据,其精度更高,利于道路模型的优化计算。但正因为其丰富的细节,如汽车、分道线、阴影、隔离带等,使得直接在高分辨遥感影像上提取道路困难重重。因此采用分级的思想,以精度不高的点云强度信息获取初级的道路线和关键点,再引入高分辨率遥感影像的光谱信息与点云强度和离散度融合,进行道路关键点和道路线的优化,可自动获取比较可靠的结果。
2.1 基于点云强度的初始道路中线提取
2.1.1 生成地面点强度影像
机载激光扫描数据滤波算法有数学形态学滤波、移动窗口滤波、迭代线性最小二乘滤波、基于坡度的滤波、启发式滤波和移动曲面滤波[13]等。本文采用多方向地面点滤波法[16],该算法在去除了局外点并进行格网差值后,通过计算每个点与局部最低点和最邻近点间高差,以及与多个方向上前一点的坡度来实现地面点滤波。
高程滤波难以区分的道路表面和植被具有较大的强度差异,将滤波后地面点强度量化至0~255区间,生成地面点强度影像,利于去除植被的干扰,提取初始道路。为突出道路区域,非地面点强度被设置为零,并将量化后的强度像素值取反,则生成的影像中道路表现为较为明亮的带状区域,植被表现为较暗的灰色区域(见图2(b)),这样利于后续初始道路的提取工作。
2.1.2 提取初始道路中线及关键点
首先采用一种线性探测器[17]探测地面点强度影像中道路的中心区域。该影像中的道路表现为较周围明亮的带状区域,算法利用此特征建立一维探测窗口沿影像水平方向移动,将窗口内像素灰度值排序,通过计算窗口中心点的排名顺序判断该点是否为道路中心点。
将道路中心区域进行Hilditch细化并曲线跟踪,由于强度噪声较大,且有停车场、空地等与道路相联通区域的干扰,会出现提取的中线被断开,以及产生错误的短线。结合道路的几何特征,对跟踪后的结果进行筛选,去除较短和曲率较大的错误线段。对余下的道路基元进行共线链编组[18],将断裂部分连接形成初始道路中线(见图2(c))。道路关键点必须是道路中线点,将其初定为每条道路线的几何特征点。利用道格拉斯算法压缩初始道路线,保留的形状特征点即为初始关键点(见图2(c))。
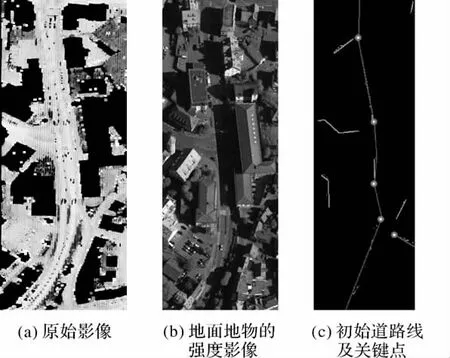
图2 Fig.2
2.2 多重信息融合的最优道路提取
2.2.1 多重信息的融合
道路边缘灰度的阶跃性及道路内部灰度的一致性是最为常见的提取线索,但对于高分辨率影像中较为复杂的场景,单凭这些线索可靠性不高。如道路中的隔离带、斑马线等易产生影像灰度跳跃,而严重的阴影和遮挡使道路失去了明显的边缘特性。
为进一步获取更加可靠及完整的道路中线,将遥感影像的灰度和LiDAR的点云离散度、强度值进行多重信息的融合,为道路的优化提供多条线索。
LiDAR数据中,区域点云分布越近似平面,点云的离散程度越小。道路表面平坦连续,对于滤波后的地面点,离散度越小的点云是路面点的可能性就越大。离散度反映了点云的高程变化情况,因此,将点云邻近范围内的高差均方差作为该点离散度指标,用于多重信息的融合稳定可靠。
将地面点离散度值量化,并与量化后的地面点的强度值及对应的高分辨率遥感影像的灰度值融合成一张三通道的融合影像。融合方法如以下公式所示
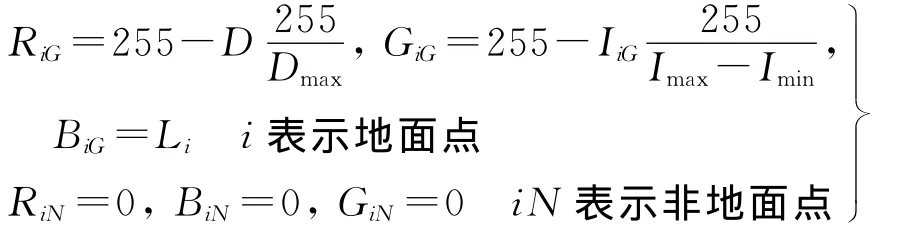
式中
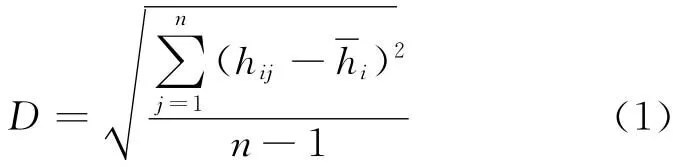
式中,hij为i点一定邻近范围的激光点高程;hi为该范围所有点高程平均值;Ii和L分别表示点强度及灰度,R、G、B分别表示融合影像三通道值。融合影像如图3(a)所示。
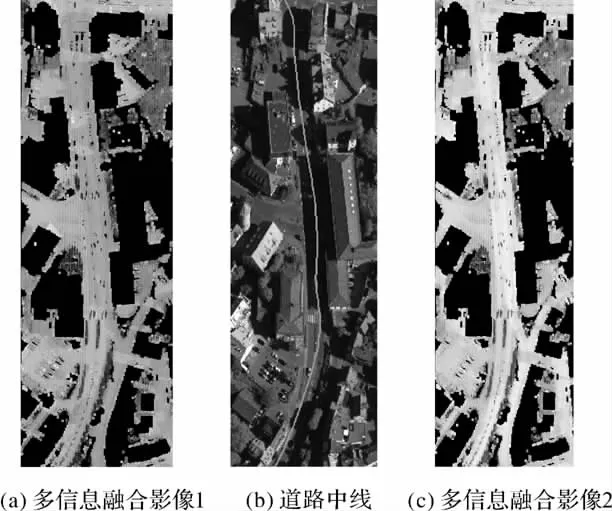
图3 Fig.3
2.2.2 关键点验证与优化
关键点是后续道路模型最优计算的种子点,必须是道路点。每条道路线含有若干个初始关键点,这些点是由地面点强度信息提取的初始道路线的形状特征点,将多重信息融合来验证这些点是否为道路点,并对部分进行优化。对每个初始关键点进行验证,综合评价该点邻近范围内点云强度,离散度及对应遥感影像灰度的变化率。如图4所示,k是初始道路线L的初始关键点,为验证该点是道路点,以该点为中心,取半径为最小道路宽度的临近范围内所有像素进行验证。步骤如下:

(2)满足条件,则k为关键点,并进行下个初始点的验证;
(3)不满足条件,则沿关键点所在道路线方向前进一个步长(见图4),重新选取该道路线上点k1重复步骤1、2,直到找到满足条件的关键点;
(4)当到达道路线终点仍未找到满足条件关键点,则去除此条初始道路线,再验证下一条道路线的初始关键点。
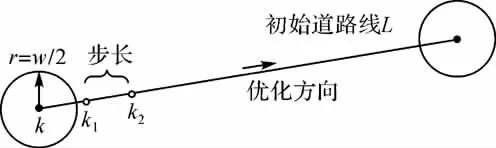
图4 关键点验证与优化Fig.4 Verification and optimization of key points
2.2.3 建立代价函数与最优计算
将道路中心线的提取转化为一个多路径决策优化问题,并利用点云强度、离散度及影像灰度建立代价函数,通过动态规划算法将多重信息融合计算各阶段多路径最优解,从而实现道路的优化(见图3(b))。
依据主要道路特征建立道路模型的代价函数:
(1)小范围内道路平坦,高程变化小,对应融合影像中高程均方差通道,则有

式中,f(s)为道路线函数;Δsi为讨论的某一段道路;hSD为融合影像的高程均方差通道值。
(2)道路面材质相同,对激光反射率小,对应融合影像中强度通道,则有

式中,I为融合影像的强度通道值。
(3)道路灰度应有一定的连续性,局部变化量小,则有

式中,g为融合影像的灰度通道值。
(4)道路方向不会扭曲且变化缓慢,所以有

综合上述特征,道路模型的代价函数可表示为:E=aE1+bE2+cE3+E4,其中,a、b、c为权重系数。
每条道路的相邻关键点分别作为动态规划计算的起点和终点,如图5所示,两点间划为n个阶段,每个阶段上沿垂直于初始道路方向一定宽度的所有像素与始末关键点共同构成了候选多路径,依据上述代价函数最小进行优化计算。

图5 多路径优化Fig.5 Multi-path optimization
3 试 验
试验1中的LiDAR数据由Leica ALS50系统获取,点密度为4pts/m2。遥感影像由高分辨率DMC面阵相机采集,8cm分辨率,分近红外、红、绿3个波段。该组数据所含场景位于德国斯图加特市内Vaihingen镇,其复杂程度主要表现为:地物繁多且密集,如高矮树木、绿地、房屋和停车场等;道路模式变化多样,纵横交错;较多路面被树木和房屋的阴影遮盖;道路宽度不一,路边没有明显边缘。由于植物对近红外波段十分敏感,为充分利用此特征,影像融合的第3通道取值由原始遥感影像的近红外比值取反代替(见图3(c)),即

利用该融合影像对道路线进行多路径优化可提高复杂场景下提取结果的可靠性。图6为未使用和使用多信息融合的动态规划提取结果的比较,未使用多信息融合时误提取的部分道路(见图6(a)),在使用多信息融合时就能够被正确提取出来(见图6(b))。图7(a)为本方法自动提取的结果,其中,矩形框标注范围放大显示后为图7(b),这两块区域存在大面积的阴影遮挡,道路基本没有边缘,但利用本方法得到了较好的提取结果。依据文献[20]定义的道路提取的完整度和准确度计算公式
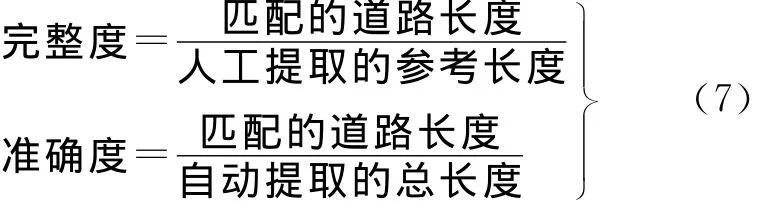
试验1的完整度为82.0%,准确度为88.3%,比未使用多信息融合时提高了22.1%。
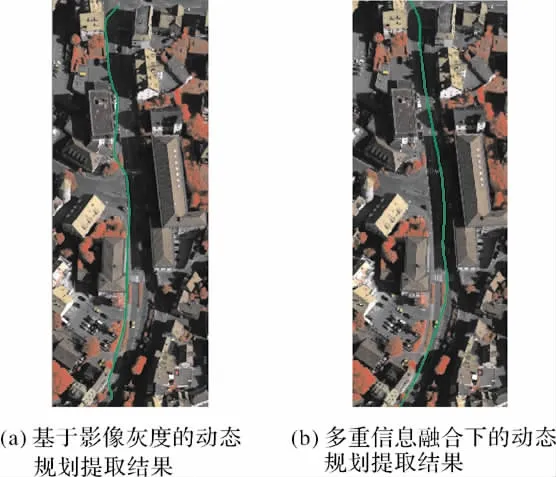
图6 Fig.6
试验数据2的LiDAR数据由Optech ALTM系统获取,点云密度为6pts/m2。遥感影像由UltraCam-D相机采集,15cm分辨率。该组数据所含场景位于加拿大多伦多市,场景复杂情况主要表现在:高楼密集、遮挡严重;大面积的阴影覆盖路面;没有明显道路边缘。图8为该区域的提取结果,相对于人工提取,其完整度为91.8%,准确度为92.4%。笔者将该组数据与文献[14]的提取结果相比较,图9两处椭圆框标注了两种方法所得结果的差异。一处标注内道路出现拐角,文献[14]没有提取出;另一处标注内没有道路,文献[14]将其误提取,而本方法均得到了正确的结果。
图7 Fig.7

图8 试验2提取结果Fig.8 Automatic extraction result of experiment 2
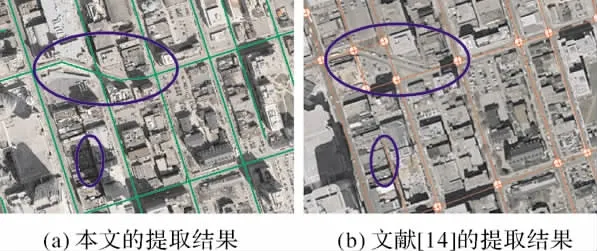
图9 Fig.9
4 结 论
本文将LiDAR数据和高分辨率遥感影像相结合,先利用激光点的高程和强度信息提取初始的道路线和关键点,可避免阴影和部分遮挡的影响,再利用多重信息验证和优化关键点,将道路提取转换为多路径优化问题,将点云强度、离散度和影像灰度融合在代价函数中,并以关键点为种子点利用动态规划算法对道路线进行优化。最后通过试验验证了该方法对大面积阴影遮挡的复杂场景提取道路的可行性,但对于没有强度信息的LiDAR数据,则限制了它的应用。
方法实现参数较多,阈值的选择会影响提取结果。后续的研究工作将针对目前的方法作如下改进:① 降低方法对参数阈值的依赖,如利用基于机器学习的方法自适应确定参数阈值,以提高方法的实用性;②利用更多高分影像上的信息寻找关键点存在的线索,如上下文信息等,以提高方法的可靠性。
[1] GRUEN A,LI H H.Road Extraction from Aerial and Satellite Images by Dynamic Programming[J].ISPRS Journal of Photogrammetry and Remote Sensing,1995,50(4):11-20.
[2] GRUEN A,LI H H.Semi-automatic Linear Feature Extraction by Dynamic Programming and LSB-Snakes[J].Photogrammetric Engineering and Remote Sensing,1997,63(8):985-995.
[3] HONG Richang,WU Xiuqing,LIU Yuan,et al.Research on Roads Automatic Extraction from Low Resolution Remote Sensing Image[J].Journal of Remote Sensing,2008,12(1):37-44(洪日昌,吴秀清,刘媛,等.低分辨率遥感影像中道路的全自动提取方法研究[J].遥感学报,2008,12(1):37-44.)
[4] AGOURIS P,STEFANIDIS A,GYFTAKIS S.Differential Snakes for Change Detection in Road Segments[J].Photogrammetric Engineering & Remote Sensing,2001,67(12):1391-1399.
[5] LI Xiaofeng,ZHANG Shuqing,HAN Fuwei,et al.Road Extraction from High-Resolution Remote Sensing Images Based on Multiple Information Fusion[J].Acta Geodaetica et Cartographica Sinica,2008,35(2):179-183(李晓峰,张树清,韩富伟,等.基于多重信息融合的高分辨率遥感影像道路信息提取[J].测绘学报,2008,35(2):179-183.)
[6] LEI Xiaoqi,WANG Weixing,LAI Jun.A Method of Road Extraction from High-Resolution Remote Sensing Images Based on Shape Features[J].Acta Geodaetica et Cartographica Sinica,2009,38(5):457-464.(雷小奇,王卫星,赖均.一种基于形状特征进行高分辨率遥感影像道路提取方法[J].测绘学报,2009,38(5):457-464.)
[7] ZHOU Shaoguang,XU Yong.To Extract Roads with No Clear and Continuous Boundaries in RS Images[J].Acta Geodaetica et Cartographica Sinica,2008,37(3):301-307.(周绍光,徐勇.在高分辨率遥感影像中提取无清晰连续边缘线的道路[J].测绘学报,2008,37(3):301-307.)
[8] ZHOU Shaoguang,LIU Juanjuan,CHEN Renxi.New Method to Extract Roads in Urban Area from High-Resolution Remote Sensing Imagery[J].Computer Engineering and Applications,2010,46(32):216-219.(周绍光,刘娟娟,陈仁喜.从高分辨率遥感影像中提取城市道路的新方法[J].计算机工程与应用,2010,46(32):216-219.)
[9] ZHANG Rui,ZHANG Jixian,LI Haitao.Semi-automatic Extraction of Ribbon Roads from High Resolution Remotely Sensed Imagery Based on Angular Texture Signature and Profile Match[J].Journal of Remote Sensing,2008,12(2):225-232.(张睿,张继贤,李海涛.基于角度纹理特征及剖面匹配的高分辨率遥感影像带状道路半自动提取[J].遥感学报,2008,12(2):225-232.)
[10] ZHU Changqing,WANG Yaoge,MA Qiuhe,et al.Road Extraction from High-Resolution Remotely Sensed Image Based on Morphological Segmentation[J].Acta Geodaetica et Cartographica Sinica,2004,33(4):347-351.(朱长青,王耀革,马秋禾,等.基于形态分割的高分辨率遥感影像道路提取[J].测绘学报,2004,33(4):347-351.)
[11] LI Liwei,LIU Jiping,YIN Zuowei.Road Extraction from High Resolution Remote Sensing Image Based on Mathematic Morphology[J].Remote Sensing Information,2005(5):9-11.(李利伟,刘吉平,尹作为.基于数学形态学的高分辨率遥感影像道路提取[J].遥感信息,2005(5):9-11.)
[12] XU Jingzhong,WAN Youchuan,LAI Zulong.Multi-scale Method for Extracting Road Centerlines from LiDAR Datasets[J].Infrared and Laser Engineering,2009,38(6):1099-1103.(徐景中,万幼川,赖祖龙.机载激光雷达数据中道路中线的多尺度提取方法[J].红外与激光工程,2009,38(6):1099-1103.)
[13] YAN Li,ZHANG Yi.Road Points Cloud Filtering Based on Fuzzy Clustering of Normal Vectors[J].Geomatics and Information Science of Wuhan University,2007,32(12):1119-1122.(闫利,张毅.基于法向量模糊聚类的道路面点云数据滤波[J].武汉大学学报:信息科学版,2007,32(12):1119-1122.)
[14] HU Xiangyun,TAO C V,HU Yong.Automatic Road Extraction from Dense Urban Area by Integrated Processing of High Resolution Imagery and LiDAR Data[C]∥International Society for Photogrammetry and Remote Sensing.[s.l.]:ISPRS,2003:388-400.
[15] LIU Xiaoping,ZHU Xiaoqiang,YU Ye,et al.The Improved Extraction of Urban Roads Based on Dynamic Programming[J].Journal of Engineering Graphics,2010(4):183-188.(刘晓平,朱晓强,余烨,等.基于动态规划的城市道路提取改进算法[J].工程图学学报,2010(4):183-188.)
[16] MENG Xuelian,WANG Le,SILVAN J L,et al.A Multi-directional Ground Filtering Algorithm for Airborne LiDAR[J].ISPRS Journal of Photogrammetry and Remote Sensing,2009,64(1):117-124.
[17] SHAO Yuanzheng,GUO Bingxuan,HU Xiangyun,et al.Application of a Fast Linear Feature Detector to Road Extraction from Remotely[J].Applied Earth Observations and Remote Sensing,2011,4(3):626-631.
[18] HU Xiangyun.Automatic Extraction of Linear Objects and Houses from Aerial and Remote Sensing Imagery[D].Wuhan:Wuhan University,2001.(胡翔云.航空遥感影象线状地物与房屋的自动提取[D].武汉:武汉大学,2001.)
[19] HEIPKE C,MAYER H,WIEDEMANN C.Evaluation of Automatic Road Extraction[J].International Archives of Photogrammetry and Remote Sensing,1997,32(Part 3-2W3):47-56.
[20] CRAMER.M.The DGPF Test on Digital Aerial Camera Evaluation——Overview and Test Design[J].Photogrammetrie Fernerkundung Geoinformation,2010(2):73-82.
