基于最大似然估计的航海雷达目标检测算法
2012-07-23陆瑛应士君孙振施朝健邹绪平
陆瑛,应士君,孙振,施朝健,邹绪平
(上海海事大学商船学院,上海 201306)
0 引言
航海事业的飞速发展使得海上活动变得日益频繁,在带来经济效益的同时,发生海上事故的频率也越来越高.海上搜救的重点是如何在短时间内找到搜救目标并确定具体方位和距离.目前的搜救方法大多依赖视觉,只有在海况和能见度良好时,才能对目标进行搜救,因此会失去许多救援机会.[1]航海雷达是一种重要的目标探测和监视手段,以其低虚警率、高可靠性和稳定性、不受夜间影响等优点,成为海上搜救的主要手段之一;但航海雷达对目标的探测受到天气、海浪等因素的影响,在恶劣气候条件下,海杂波会严重影响航海雷达探测甚至淹没雷达目标.
由于海况变换复杂,在雷达和通信领域经常使用恒虚警率 (Constant False Alarm Rate,CFAR)检测方法.该方法主要利用图像中目标和杂波之间的对比度差异将较亮的目标检测出来,但同时会产生许多虚警目标[2].搜索是整个航海搜救过程中最昂贵和最复杂的部分[3],因此提高搜索效率对整个搜救过程极其重要.
针对这个问题,结合已知目标的船舶自动识别系统(Automatic Identification System,AIS)信息,提出一种利用最大似然估计(Maximum Likelihood Estimate,MLE)确定海杂波中搜索目标阈值的方法.实验结果表明,该算法能够提高海上救援效率和雷达搜索目标的准确性,有效检测目标.
1 常见CFAR检测方法
常见的CFAR检测方法有单元平均恒虚警(Cell Averaging-CFAR,CA-CFAR)[4]和有序统计恒虚警(Order Statistics-CFAR,OS-CFAR)[5].在多目标干扰环境下,当一个主目标参考单元内出现另一个或多个干扰或目标时,阈值上升,CA-CFAR对主目标的检测性能会随着干扰强度和数目的增加而严重下降;在均匀环境下相对均值类CFAR检测方法都有不同程度的检测损失;参考单元排序的运算量大,工程难以实现[6].这些CFAR算法在复杂性、实用性、适用范围等方面各有优缺点,没有哪个CFAR算法适合所有杂波情况.基于上述情况,出现如下的双参数 CFAR 算法[7].
(1)设矩阵R= ( rij)M×N为该雷达图像,R的元素位置(i,j)对应于数字图像上某一个像素点的位置,rij为像素点(i,j)上的灰度值:
(2)基于高斯噪声背景,需要估计两个参数(均值和方差).目标窗和背景窗设置见图1,其中背景窗边长为目标窗尺寸的2倍.
(3)设背景窗中所有像素的均值和方差为μb和.假设目标窗中某一像素的灰度值为I,则目标检测准则为


图1 双参数CFAR检测算法窗口设置
式中:t为标称化因子,是根据所要求的虚警率确定的因数,一般取 2.5~3.5.该式成立时,判定为目标,否则为背景.
2 基于MLE的检测目标阈值确定
2.1 AIS 坐标与雷达坐标的转换[8]
AIS是一种新型的辅助导航设备,它能提供大量的船舶动态和静态信息[9-10],其数据来源为甚高频信号的传输,受到海杂波、气象和海况的干扰很少,AIS能弥补航海雷达在大雾和雨雪等恶劣天气下不能探测目标的不足.
自动雷达标绘仪(Automatic Radar Plotting Aids,ARPA)对目标的观测以本船为中心、以目标船相对于本船的方位和距离来标志,ARPA把屏幕上的目标视频回波量化成内存中的方位-距离矩阵.
AIS播发的目标位置信息是基于WGS84地理坐标系的经度和纬度的.为了把AIS信息与雷达信息很好地相结合,需要进行坐标变换,采用高斯-克吕格投影把经纬度先转换成平面直角坐标,然后再把平面直角坐标转换成相对于本船位置的北向上极坐标,使它们处于同一坐标系内.
2.2 阈值T的MLE
目前,用双参数CFAR处理图像获得的阈值T受虚警率控制,在海况不佳或能见度不良时,不能及时发现搜救目标.在这种情况下,可以根据已知样本的统计特性对未知类别样本进行分类,而MLE方法则是一种有效估计目标参数的方法[11].本文引入机器学习,用MLE方法估计参数T,适当提高虚警率,尽可能自动检测到海杂波中的目标.根据MLE方法,具体步骤[12]如下:
(1)海面回波的强度随距离变化很大,参数T会因距离和方位不同而可能不同,因此在参数估计前,先对雷达图像进行CFAR处理,使其背景平稳,有利于目标检测.航海雷达的距离分辨率与脉冲宽度有关,脉冲宽度越小,距离分辨率越高.在此,设目标窗口大小为最大AIS目标船长的2倍,设背景窗口大小为目标窗口大小的2倍,以防止目标窗口中的目标部分泄露到背景窗口中.
(2)设背景窗中存在AIS目标数为N,用样本集K= {x1,x2,…,xN}表示目标,其中xi为目标窗中第i个目标.将K作为样本集对整幅雷达图像进行训练,即用来估计阈值.
(3)根据样本集K,将雷达图像分为目标和背景两类.计算背景窗中AIS目标的样本均值和样本方差.样本均值为

样本方差为

式中:M为目标窗中像素总数;xi为目标窗中第i个目标.

式中:xi为背景窗中AIS目标样本,服从瑞利分布;S为需要估计参数.在已经得到试验结果的情况下,应寻找使这个结果出现可能性最大的MLE作为S的估计.

式中:N为样本数.所以参数S的MLE为
(5)对于概率分布为p( x,S)的随机变量,其CFAR方程为

由上式,解得阈值

(7)由p(x,S)和虚警率Pf之间的关系可知,可以适当提高虚警率Pf达到雷达自动检测的目的,直至调整到背景窗中雷达目标回波数与实际AIS目标数目相等为止,此时T为最佳阈值,能很好地区分杂波背景和目标.
(8)重复上述过程,边训练边调整阈值,直至完成对整幅雷达图像的训练和分类为止.
3 实验与分析
所用实验图像为通过坐标转换得到的二维距离和方位的航海雷达回波图像.雷达图像的像素值为雷达回波的振幅,其灰度级数为256(8位).雷达利用3 n mile工作量程和中级脉冲检测目标,脉冲宽度为 0.1 μs,范围量化单元的大小为 6.67 m,方位量化单元的大小为0.088°,一个雷达目标回波占一个量化单元.
经过多次海上试验,选取其中两幅图像进行分析,图像大小为308×512.图2是在上海洋山港锚地附近水域,波高0.5 m,流较小,目标不密集时实验得到的图.其中,图2(a)是原始雷达图像,图2(b)是用双参数恒虚警处理的图像,图2(c)和(d)为采用MLE方法处理的图像.
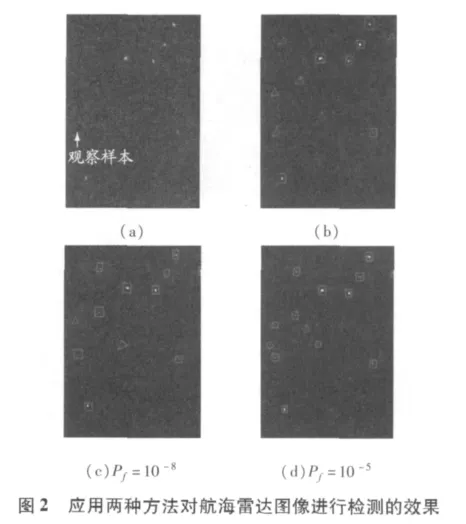
表1列出该情况下对图像使用两种检测方法的指标对比.图像中船舶实际目标数为12,最大AIS目标船长为11,则背景窗口大小为19×19,目标窗口大小为11×11.

表1 处理结果
图3是在长江口鸡骨礁东南约5 n mile附近水域,波高4 m,流较大,目标密集时实验得到的图.其中,图3(a)是原始雷达图像,图3(b)是用双参数恒虚警处理的图像,图3(c)和(d)为采用MLE方法处理的图像.
表2列出该情况下对图像使用两种检测方法的指标对比.图像中船舶实际目标数为15,最大AIS目标船长为11,背景窗口大小为19×19,目标窗口大小为11×11.
每幅图像水平方向代表距离,竖直方向代表方位.图中,用矩形表示正确目标,用圆表示虚警报目标,用三角形表示漏检目标.为了衡量检测效果,定义检测的品质因子[7]

式中:Ntt为检测中正确的检测目标数;Nfa为虚警目标数;Ngt为实际目标数.
使用双参数CFAR方法检测目标,需要对图中每点都进行统计,计算量很大,时间长且在目标很小时会造成虚警、漏检、算法不稳定.在虚警率相同的情况下,正确的检测目标数Ntt和品质因子MFo均比MLE方法低.为了尽可能检测到海杂波中的目标,可适当提高虚警率,利用MLE方法可以很好地从海杂波里检测出目标船舶.
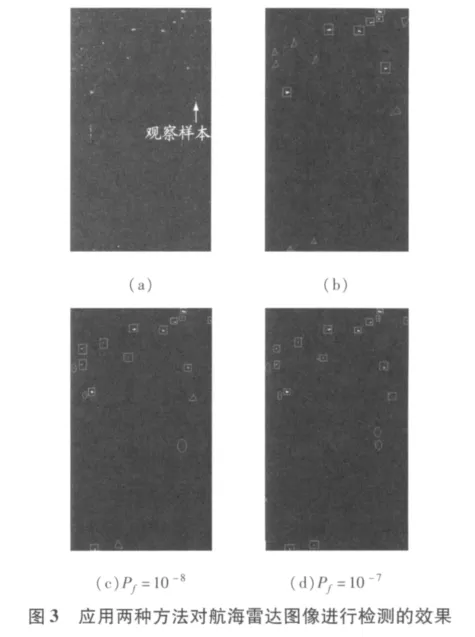

表2 处理结果
4 结束语
探讨把已知目标的AIS数量、长度和位置信息作为样本集,用MLE方法估计海杂波中搜索目标的阈值.作为海上搜救的处理手段,算法时间不能太长,计算量也不能很大.实验结果表明,MLE方法在时间和计算量上均比传统方法好,在虚警率相同的情况下,目标正确数和漏检数比双参数CFAR都好.经过分析可知,该算法可以提高海上搜索和救援效率及雷达搜索目标的准确性.
[1]YING Shijun,CHEN Jinbiao,SHI Chaojian.Target recognition for marine search and rescue radar[C]//Proc 2010 6th Int Conf on Natural Computation.Yantai,China:IEEE Circuits & Systems Soc,2010:676-679.
[2]袁湛,何友,蔡复青.基于改进扩展分形特征的SAR图像目标检测方法[J].宇航学报,2011,32(6):1379-1385.
[3]胡志武,毕曙光,耿鹤军.海上搜寻区域确定的计算机辅助方法[J].上海海事大学学报,2008,29(2):11-16.
[4]武楠,徐艳国,李宗武.海杂波背景下的双参数单元平均恒虚警检测器[J].现代雷达,2010,32(2):52-56.
[5]CUI Yi,YANG Jian,ZHANG Xinzheng.New CFAR target detector for SAR images based on kernel density estimation and mean square error distance[J].J Syst Eng & Electron,2012,23(1):40-46.
[6]李晶晶,王首勇,胡文琳.基于多杂波分布模型的自适应单元平均恒虚警检测[J].空军雷达学院学报,2005,19(3):4-7.
[7]艾加秋,齐向阳,禹卫东.改进的SAR图像双参数CFAR舰船检测算法[J].电子与信息学报,2009,31(12):2881-2885.
[8]YING Shijun,CHEN Jinbiao,SHI Chaojian.A data fusion algorithm for marine radar tracking[C]//IEEE Pro 2009 WRI Global Congress on Intelligent Syst.Xiamen,China:CPS Conf Publishing Service,2009:234-238.
[9]申慧超,胡勤友,杨春.基于AIS数据的预抵船舶联系信息查询系统[J].上海海事大学学报,2010,31(4):13-16.
[10]林祎珣,邵哲平.基于嵌入式Web服务器的AIS数据无线采集系统[J].上海海事大学学报,2011,32(1):40-43.
[11]王晓丹,王积勤.雷达目标识别技术综述[J].现代雷达,2003(5):22-26.
[12]POURMOTTAGHI A,TABAN M R,NOROUZI Y,et al.A robust CFAR detection with ML estimation[C]//IEEE Radar Conf,RADAR 2008.Rome,Italy:IEEE Aerospace & Electron Systems Mag,2008:1-5.
