一种基于SPWM控制的逆变器设计与仿真
2012-07-23杨静伟李声晋张玉峰
杨静伟,卢 刚,李声晋,张玉峰,周 勇
(西北工业大学,陕西西安710072)
0引 言
近年来,随着生产生活中对电源质量要求的不断提升,逆变器的使用越来越广泛。通常把直流电变成交流电的过程叫做逆变,完成逆变功能的电路称为逆变电路。逆变技术的应用大大提高了电能的使用效率以及电源的质量,因此对于节约能源等方面有着重要的意义。传统的逆变器系统常采用三相三线制,但是这种逆变器只能给平衡负载供电,在带不平衡负载逆变器中越来越多地采用了三相四线制,其主要区别在于三相四线制系统通过不同的方式做出了零点O,作为第四条线。根据引入中点的形式不同,可以分成分裂电容式和三相四桥臂两种如图1所示。
在分裂电容式逆变拓扑结构中,有两个分裂电容作为引出中点的主要器件,即直流母线上的两个分裂电容的中点与三相四线制的中线连接,通过分裂电容来调节中线上的电流,这样输出端的电流就势必要流过直流部分的电容。虽然这种拓扑机构相对其他四桥臂拓扑机构简单,但是由于中线部分的电流要通过直流电容,所以直流侧的电容的选择成为这种拓扑结构的瓶颈,同时,由于交流电中带有较大的谐波,也对分裂电容提出了更高的要求。

图1 逆变器拓扑结构
三相四桥臂的拓扑结构主要是在逆变拓扑结构中再增加一对开关管,通过这对开关管增加一对桥臂,这种拓扑结构抛开了分裂电容式对电容的高要求,不再受分裂电容的制约,但是通常是通过空间矢量调制方案进行控制,这样大大加重了逆变器控制方案的复杂程度。无论是分裂电容式三桥臂还是四桥臂式的逆变器拓扑结构,都是通过引出中线来调节负载端不平衡的电流。
针对上述情况,本文主要在三桥臂的基础上,增加Boost升压电路,作为第四桥臂,引用上述四桥臂的中线回路方法,既克服了四桥臂控制复杂度的问题,又改进了三桥臂控制。
1建立系统仿真模型
为了验证双闭环控制四桥臂逆变器对不平衡负载的控制,运用MATLAB对四桥臂逆变器电路,进行仿真。
1.1 Boost电路
Boost变换电路,也称升压式变换电路,是一种输出电压高于输入电压的直流变换电路。其中开关管的驱动电压为PWM信号,因此本系统采用这种Boost PWM DC/DC变换器组成的逆变器,将会较简单地实现升压逆变。Buck-Boost基本电路通常用于DC/DC变换,通过调节开关占空比,可以控制输出电压高于或者低于其输入电压,这里先对Buck-Boost基本电路的工作原理进行分析。
Buck-Boost基本电路如图2所示。

图2 Buck-Boost基本电路
其具体工作情况如下:当开关管VT1开通,此时二极管VD1是反向偏置截止的,则电感L1中的电流iL1上升,直流输入侧电源Ud向电感注入能量;当VT1关断,则由于电感L1的自感电动势作用,电感中的能量为负载供能并且向电容C1中转移,电感电流iL1下降。在一个周期内,电感两端电压UL1在VT1开通时为 -Ud,而在 VT1关断时,UL1=Uo1,显然在一个周期内,UL1=0,则输入输出电压和VT1开关占空比时间的关系如下:

式中:Uo1为电路的输出电压的平均值;Ud为电路的输入电压;D为控制占空比。
对于本系统仿真的逆变器要求,采用Boost的两个开关管作为第四桥臂,如图3所示。本系统为了解决电流反向流通,在IGBT开关管上并联有反向的二极管,这样功率可以双向流动而不会造成电流反向流动的现象。其仿真模块如图3所示。

图3 Boost升压电路仿真模块
1.2 SPWM调制信号的仿真
用参考正弦波Us与频率为fc的三角载波Uc进行比较,得到两路控制信号,如图4所示。信号vge1和信号vge2用以驱动同一桥臂的开关管。正弦波大于三角波的部分,输出为正脉冲,小于部分,输出负脉冲。在开关切换时,负载端电压极性非正即负,电流变化率较大,对外部干扰较强。负载端电压脉冲列是由不同宽度调制的正负直流电压组成。

图4 SPWM产生原理
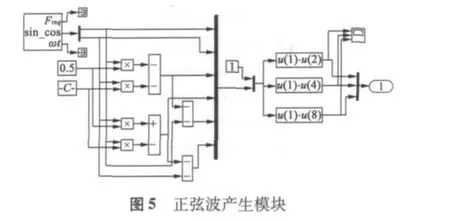
用MATLAB软件对SPWM调制信号的仿真,主要由正弦波产生模块和三角波产生模块如图5、图6所示。正弦波产生模块产生三路正弦波,相位相差120°,再根据上述SPWM产生原理对信号进行处理,得到频率为15 kHz的SPWM。

1.3三相四桥臂逆变器拓扑结构仿真

图7 三相四桥臂拓扑结构仿真图
本文的逆变器采用分裂电容三相四线制拓扑结构,它有结构简单、功率器件较少等特点。利用电源输入端的两个串联电容的中点,作为三相输出的共地端,可构成三相四线制的输出,如图7所示。这时,为了防止中点电位的偏移,一方面增大串联电容的电容值,同时解决当功率较大时或者缺相情况下,电容存在偏压的问题,本文所设计逆变器采用较大容量的电容作为分裂电容。
1.3双闭环控制四桥臂逆变器系统模型
对以上各模块进行整合与联立,利用MATLAB软件对三相逆变器进行系统仿真,其整体结构图如图8所示。基本结构主要分为SPWM产生模块、Boost控制模块、Boost及逆变器拓扑模块、滤波及负载模块。
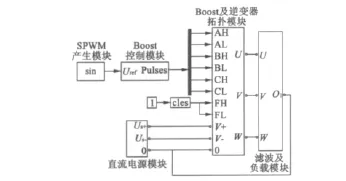
图8 MATLAB仿真整体结构图
2闭环PID控制
逆变器运行工况比较复杂,具有非线性、时变性和不确定性等特点。其工作工况主要受负载的影响,为了保证电压不被负载拉低,采用PID闭环控制策略,适时调整占空比。其工作原理如图9所示。
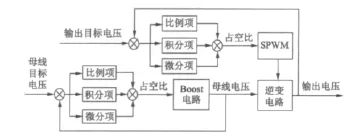
图9 双闭环控制策略图
目前,PID控制在控制系统中应用比较广泛,本系统中PID闭环控制主要是对积分系数TI、微分系数TD、比例系数Kp的选择,这些系数选择主要是由系统自身特性和要求来决定,特别是考虑考系统的稳定性、快速响应性以及静态误差等因素。
假设系统的指令值为c(t),实际输出值为y(t)。则偏差值为e(t)=c(t)-y(t)。
逆变系统PID闭环控制输出特性可以总结:

根据kp、ki、kd对系统调速控制器输出特性的影响,分别建立校正原则。
(1)kp的校正原则
增大比例系数kp能减小稳态误差,提高调节精度,提高响应速度。但kp过大,会使调节过程产生较大超调,甚至导致系统不稳定;kp过小会降低调节精度,减慢响应速度,延长调节时间。
(2)ki的校正原则
积分调节主要用于消除控制静差。但是由于系统的非线性因素,使得调节过程中会产生积分饱和(过积分),引起较大超调。
(3)kd的校正原则
微分调节能针对系统的变化趋势提前给出控制信号。kd值过大,调节过程会超前,使调节时间过长;kd值过小,调节过程会滞后,导致超调值增大。
3仿真结果
SPWM仿真波形如图10所示。

图10 单周期SPWM仿真图
Boost升压控制PID仿真波形如图11所示。

图11 Boost升压控制PID仿真波形
平衡负载时,负载电流波形图如图12所示。

图12 平衡负载工况下三相的电流波形
不平衡负载下,负载电流波形图如图13所示。
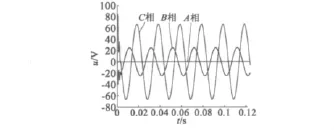
图13 不平衡负载工况下三相的电流波形
三相负载大小及对应的三相电流值如表1所示。

表1 三相负载及对应电流值
PID控制下指令和反馈的跟随性波形如图14所示,图中可以看出指令和反馈的值跟随性较好。

图14 PID控制指令与反馈跟随
4结 论
本文建立了基于SPWM的三相四桥臂逆变器惯性系统的仿真模型,并通过双闭环控制策略可以得出以下结论:
(1)采用的三相四桥臂拓扑结构,能够较好的处理三相不平衡负载的工况。
(2)通过Boost升压电路能够较好的提升逆变器母线电压,提高逆变器的电压驱动能力。
(3)通过双闭环控制策略,能够根据工况对输出电压进行实时调整,得到稳定的输出电压,指令和反馈具有较好的跟随性。
[1] 赖日生.新型功率变换器-多电平变换器新品种[J].世界电子元器件,1999(11):38-42.
[2] 吴洪洋,何湘宁.高功率多电平变换器的研究和应用[J].电气传动,2000,30(2):7-12.
[3] 吴洪洋,多电平变换器及其相关技术研究[D].杭州:浙江大学电气工程学院,2002.
[4] 李永东,肖磷,高跃.大容量多电平变换器一原理、控制、应用[M].北京:科学出版社,2005.
[5] 杨晓波.三相四桥臂变换器调制与闭环控制研究[D].燕山大学,2007.
[6] 皇甫剑锋,卢刚,常建军,等.基于USB通信的伺服电缸控制系统.[J]微特电机,2011(8):44-46.
[7] Zhou Yong,Zhang Qing-jiang,Zhou Qi-xun.Research on Nonlinear PID Control of Digital Governor for Diesel Engine[C]//Third International Conference on Education Technology and Training,ETT 2010.2010:411-414.
[8] 周勇.用于四轮纯电动车辆的电控驱动系统设计研究[D].西安:西北工业大学,2011:49-52
[9] 任晓鹏,焦翠坪,张喜军,等.基于MATLAB的三相四线制四桥臂有源滤波器控制策略仿真[J].2010(6):51-53,67.
[10] 卓放,王跃,王兆安.三相四线制电路中的瞬时无功功率及有源电力滤波器[J].电工技术学报,2001(4):1-4.
[11] 周松林,刘增良.基于双BOOST电路的正弦波逆变器的研究[J].自动化技术与应用,2007(1):86-88.
