交流磁轴承原理及研究发展现状
2012-07-20黄振跃魏杰朱熀秋
黄振跃,魏杰,朱熀秋
(江苏大学 电气信息工程学院,江苏 镇江 212013)
磁悬浮轴承(简称磁轴承)是利用电磁力将转子悬浮于空间,实现转子和定子之间无机械接触的一种新型轴承,因此其具有无摩擦、无磨损、不需润滑及密封、高速、高精度及长寿命等优点,改变了传统的接触支承形式[1]。按功放控制电流类型分类,可将磁轴承分为直流式与交流式。直流式磁轴承功率放大器价格高,体积大,一个径向磁轴承通常需要四路单极性功率放大电路[2-4];而交流式磁轴承采用交流三相功率逆变器给控制线圈绕组提供励磁电流,一个三相功率逆变器就可完全控制径向两个自由度,且三相逆变器应用技术成熟、价格便宜、体积小巧,采用矢量控制策略,易于控制系统软件的编程与移植,从而整体上减小了磁轴承控制系统成本[5-8]。因此,交流式磁轴承在磁轴承电主轴系统、无轴承电动机、高速飞轮储能系统等需磁悬浮支承的高速运动场合具有很好的应用前景。
1 交流磁轴承系统组成及其基本原理
一个刚体在空间的运动包括平动和转动,共6个自由度[9]。文中描述的主动磁轴承的状态是绕主轴即z方向转动,从而需对余下的5个自由度进行控制,这就要求有两个径向轴承(各负责x,y两个方向)和一个轴向轴承(负责z方向),由此构成一个完整的电磁轴承系统。
这里以一个交流两自由度混合磁轴承为例来说明其工作原理[7-8, 10]。图1为交流两自由度混合磁轴承的工作原理图。交流磁轴承的工作原理是基于无轴承电动机的原理,使转矩绕组极对数P1为0,悬浮力绕组极对数P2为1,满足径向悬浮力产生的条件P2=P1±1,采用三相功率逆变器对悬浮力绕组提供驱动电流,因而这种结构的无轴承电动机实际就变成了只产生径向悬浮力的磁轴承[8,10-11]。根据电动机理论,三相绕组通上三相交流电后,可产生一个旋转磁场,形成一个单极合成磁通。当磁轴承受到径向扰动时,转子偏离径向参考平衡位置,位置传感器检测出转子的径向偏移位置x与y,并反馈至径向控制器,与参考平衡位置x*及y*相比较后,控制器计算出转子的偏移量x与y,再将其转变成控制信号,通过电流跟踪功率逆变器(CRPWM)对径向3个控制线圈提供三相控制电流ia,ib和ic,使得径向三相绕组中控制电流产生的合成单极磁通可指向与位置偏移相反的方向,产生相应的径向磁悬浮力,使转子回到径向平衡位置。
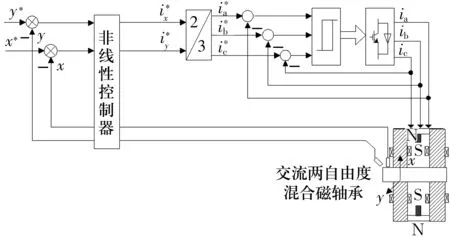
图1 交流两自由度混合磁轴承的工作原理
2 交流磁轴承的分类和特点
2.1 主动式和混合式
交流磁轴承按悬浮力产生的原理分类,可分为主动式磁轴承[2-3,5,7]与混合式磁轴承[4,6,8]。产生静态悬浮力的磁通称之为偏置磁通;产生动态悬浮力,即以克服扰动或负载的磁通称之为控制磁通。
主动式磁轴承(Active Magnetic Bearing,AMB)采用电磁铁同时提供偏置磁通及控制磁通,可提供较大静态承载力。但由于线圈安匝数大,因而体积较大,且在稳态悬浮时,仍然依靠功率放大电路提供偏置磁通,因而耗能高,损耗大。目前研究比较多的为三相交流主动磁轴承[7,10,12],如图2所示,该磁轴承由带有3个磁极的定子铁心、三相励磁线圈和转子铁心构成。当三相励磁线圈通入三相交流电后产生的合成悬浮力等于转子铁心自身的重力和外部干扰力时,该交流磁轴承转子可实现悬浮。目前国内江苏大学主要研究这种结构的磁轴承,国外研究这种结构的有西班牙纳瓦拉大学和韩国科技研究所。区别于三极结构磁轴承,还有一种六极结构的交流主动磁轴承[13],如图3所示,该交流主动磁轴承是由3个U形铁心配以三相励磁线圈的定子和转子组成,其工作原理和上述磁轴承相同。
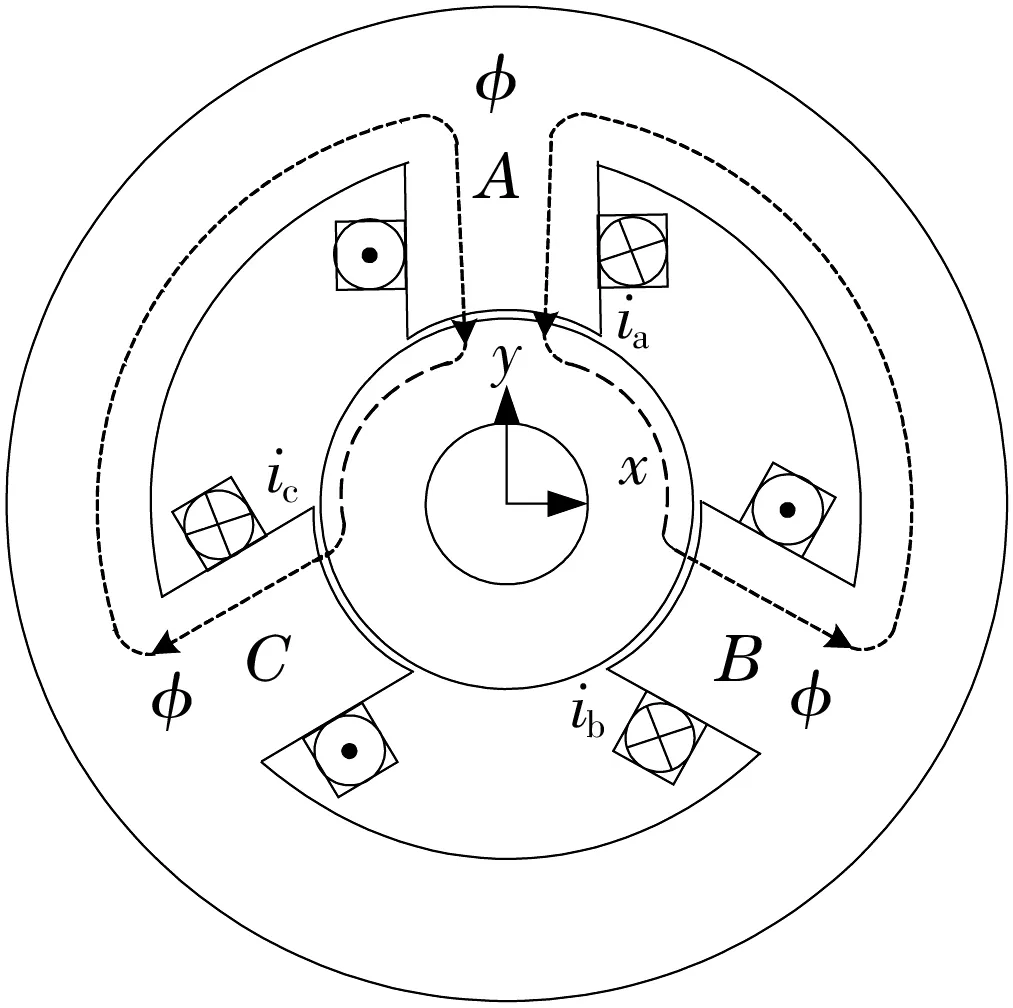
图2 三相交流主动磁轴承结构图
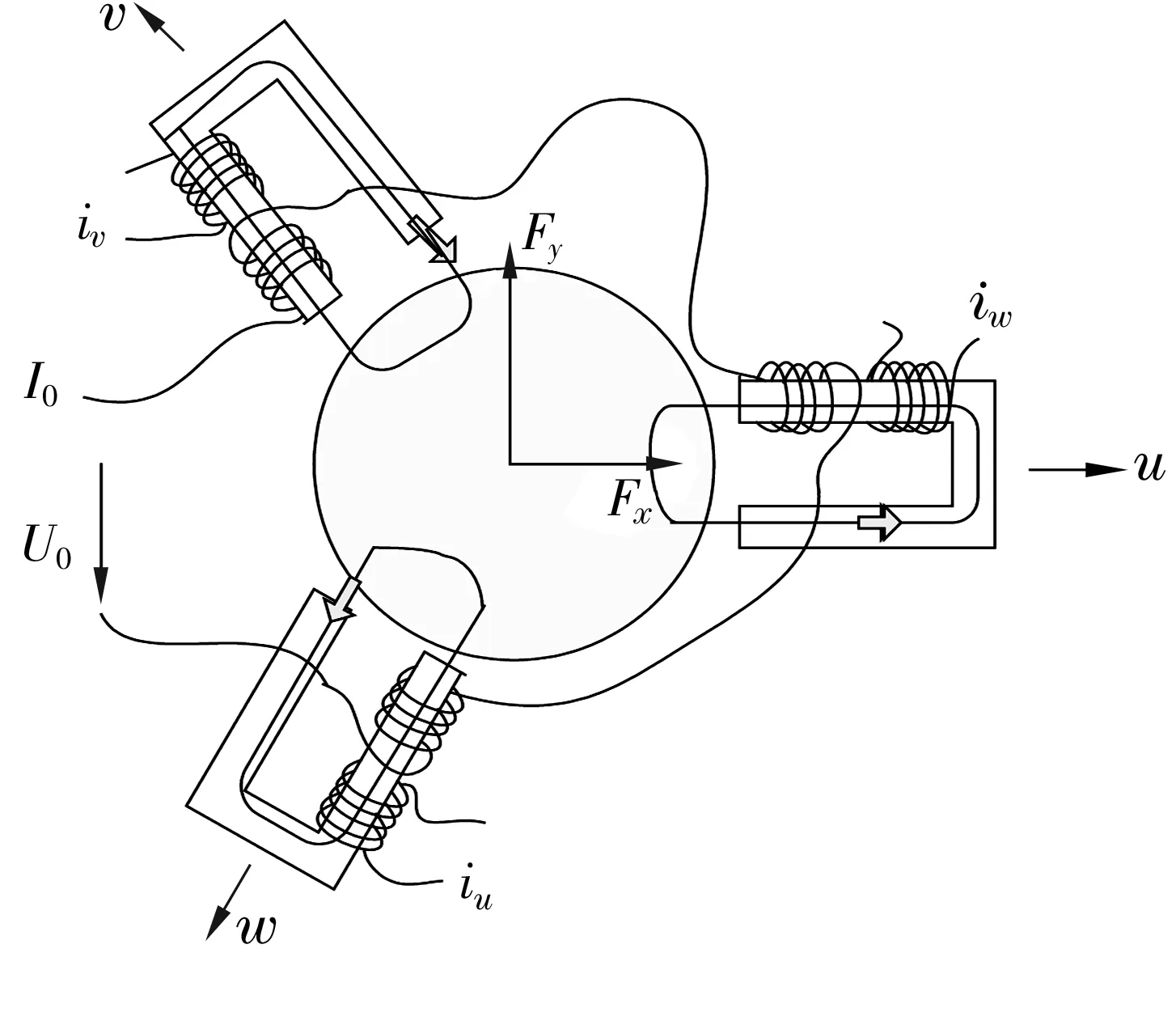
图3 交流主动异极磁轴承结构图
混合式磁轴承(Hybrid Magnetic Bearing,HMB)是依靠永磁体来提供偏置磁通,即永磁体产生的磁力支承转子的自重,而电磁铁只需提供控制磁通,保证转子在受到干扰时能够回到原来的悬浮位置;因而,其功放体积较小,结构紧凑,稳态运行时耗能小,损耗低[4,6,8-9]。目前国内研究的结构有双片(3×2)六极交流两自由度混合磁轴承[8],如图4所示。该磁轴承的定子由两片相同的三相交流主动磁轴承叠加起来,这样控制线圈(励磁线圈)就有两组,两组控制线圈分别串联连接,两定子铁心之间加入永磁体,产生偏置磁通,当外界没有干扰,静态悬浮时,偏置磁通可以使转子悬浮于中心位置;当受到干扰时,两组线圈同时通电产生与干扰力方向相反的磁力将转子拉回到原来的中心位置。国内主要研究机构是江苏大学。还有一种六极式交流两自由度混合磁轴承[14],如图5所示,通过在其中3个极上嵌入永磁体,来产生偏置磁通;另外3个极缠绕三相控制线圈,当转子受到干扰时用来控制转子依然悬浮于平衡位置,国外研究的机构主要是韩国科技研究所。
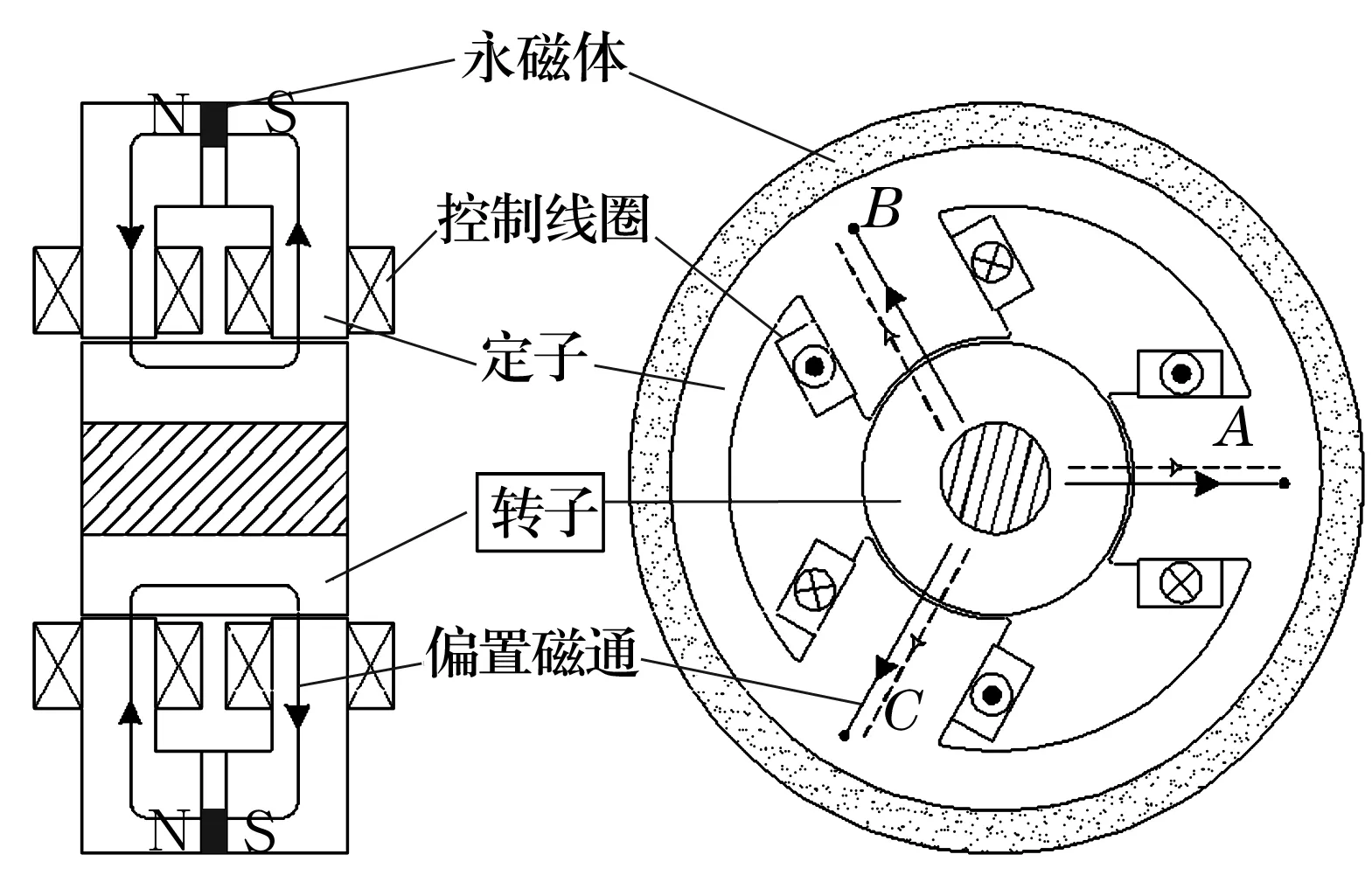
图4 交流两自由度混合磁轴承结构图
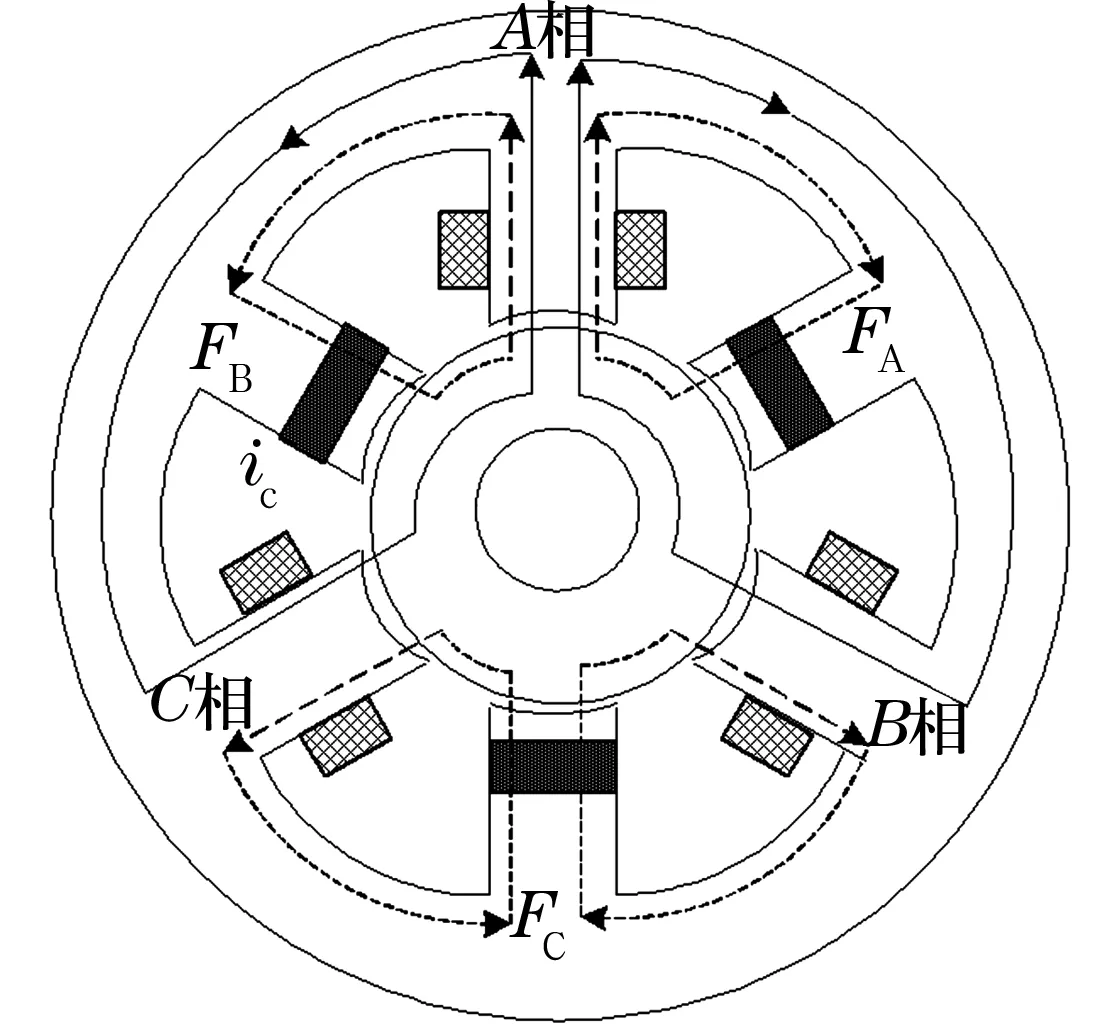
图5 三相交流混合磁轴承结构图
2.2 异极式和同极式
磁力线垂直于转子轴线的磁轴承叫异极式磁轴承,在这种结构形式中,磁轴承与电动机相似,易于制造。所以目前大多数磁轴承采用异极式,但是该结构缺点是磁滞损耗比较大,因此,为了使磁滞损耗尽可能地小,转子必须是叠片式的,即转子的磁作用部分必须由压紧的圆形冲片叠片而成。由于机械系统的仿真、控制系统的设计和转子运动的测量通常都是建立在直角坐标轴的基础上,为了使轴承的控制得以简化,径向磁轴承的布局一般都采用3极结构形式[10,14],如图2所示。在大型磁轴承的应用场合中,有时可以采用增加磁极数目的办法实现其目的。
磁力线平行于转子轴线的磁轴承叫做同极式磁轴承。如图6 所示。这种布局通常被称为同极磁铁,其磁滞损耗比较小,转子可以不需要叠片[8]。这种结构主要应用于那些由于各种原因致使转子不能采用叠片的场合。这种结构采用四极电磁铁,两个自由度上同样使用差动的结构。

图6 磁力线平行于转子轴线
2.3 磁极数目
目前交流磁轴承中的磁极数目只有两种:3极和6极。图2和图4为三极结构磁轴承,图3和图5为6极结构磁轴承。交流磁轴承大多采用三相功率逆变器给控制线圈绕组提供励磁电流,一个三相功率逆变器就可完全控制径向两自由度,且三相逆变器应用技术成熟、价格便宜、体积小巧,采用矢量控制策略,易于控制系统软件的编程与移植,从而整体上降低了磁轴承控制系统成本。三极结构不仅易于实现对转子径向位移的集中控制,而且具有成本低、铁损小、散热性能好、绕组和传感器安装方便等优点,在磁轴承系统、无轴承电动机、高速飞轮储能系统等磁悬浮支承的高速运动场合具有很好的应用前景。
3 交流磁轴承驱动方式和控制方法的研究现状
3.1 交流磁轴承的驱动方式
目前交流磁轴承的驱动方式主要有三相逆变器驱动和矩阵变换器驱动两种。
3.1.1 三相逆变器驱动
目前着力研究三相逆变器驱动的三极交流主动磁轴承的学者有德国克姆尼茨工业大学的Hofmann W[15];国内浙江大学和江苏大学也在研究逆变器驱动式磁轴承[5,8]。
Hofmann W 针对三极径向主动磁轴承(结构如图2所示)进行了稳态分析,并在考虑电磁和机械变量之间的相互耦合关系情况下,设计出了单极主动磁轴承的控制系统。在不同的偏置电流下,控制系统取得了较好的解耦效果,图7为逆变器驱动的三极径向主动磁轴承主电路拓扑[15]。
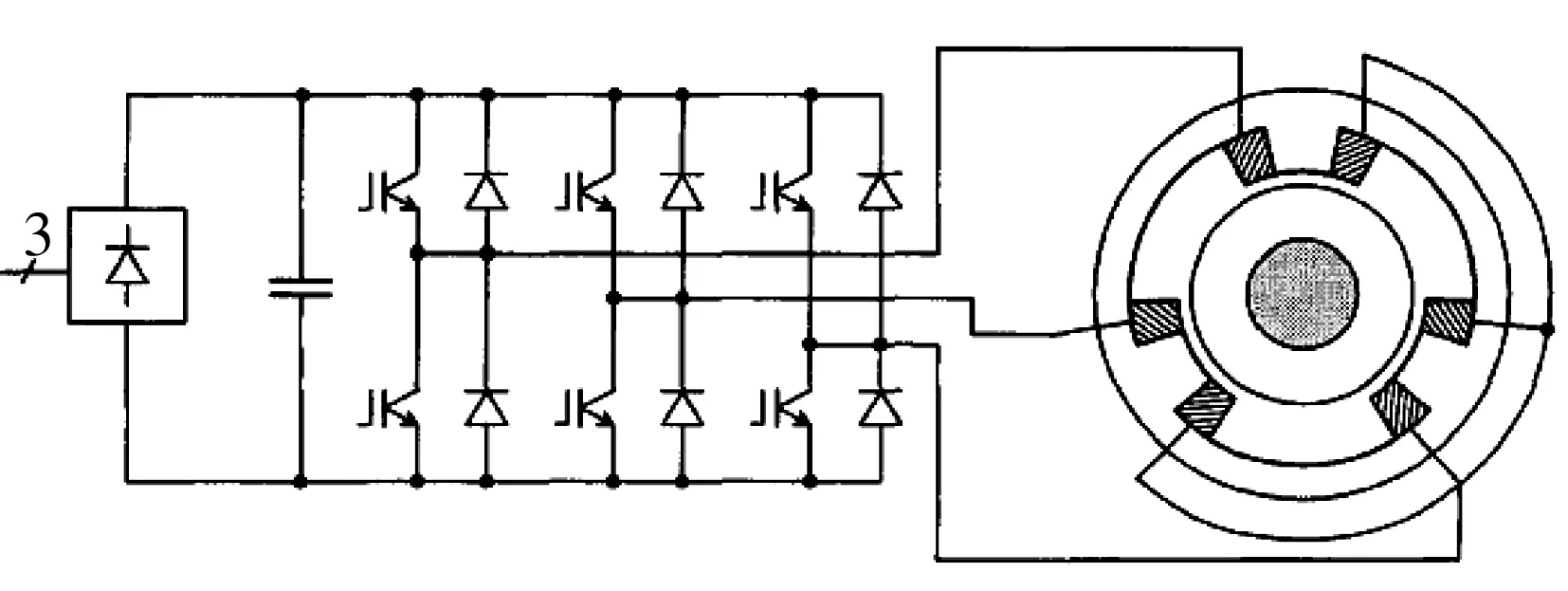
图7 逆变器驱动的三极径向主动磁轴承主电路拓扑
国内浙江大学研究的交流磁轴承结构以及控制框图与Hofmann W研究的类似,如图8所示。
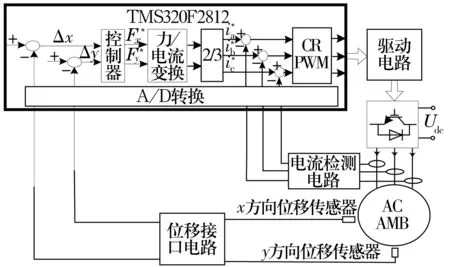
图8 三相交流主动磁轴承的控制框图
针对三极径向主动磁轴承,浙江大学建立了其线性解析数学模型,并用有限元软件Ansoft/Maxwell 2D/3D对其进行了原理性验证。设计了滞环电流跟踪型的三相功率控制电路,在dSPACE上进行了初步试验。而且对功率逆变电路中的电压反馈电路、电压滞环比较电路、脉冲分配电路、故障输出保护电路、智能功率模块IPM以及相应的接口电路进行了设计[5]。
江苏大学研究了三极交流主动磁轴承和混合磁轴承[6-8,16],主动磁轴承结构如图2所示[7,16],混合磁轴承结构如图4所示[6,8],针对这两种结构介绍了三相逆变器驱动的交流磁轴承的基本结构与工作原理,用等效磁路法对该磁轴承的磁路进行了计算,得到了其悬浮力数学模型;根据试验样机悬浮磁力的要求,给出了试验样机材料选择、参数设计和计算过程;利用有限元Ansoft软件对该结构磁轴承的磁场和转子受力情况进行仿真验算,并采用Matlab软件对磁轴承悬浮力非线性和径向两自由度之间在平衡位置附近运动的耦合性进行了计算分析,并给出了详细的控制框图,如图1所示。研究结果表明:这两种磁轴承机械和磁路结构合理,悬浮力满足设计要求,且在平衡位置附近具有较好的线性和对称性,径向两自由度之间几乎没有运动耦合。
3.1.2 矩阵变换器驱动
矩阵式变换器是一种先进拓扑结构的“全硅”功率变换器,它允许频率单级变换,无需大容量的贮能元件,而且输入电流、输出电压正弦,输入功率因数可达到0.99以上并可自由调节,能量可双向流动。
这种驱动方式是2008年在日本举行的第十一届国际磁轴承会议中由西班牙Javier Vadillo提出来的[17]。当时提出这种驱动方法是基于直接空间矢量调制策略并与传统电压源逆变器驱动方式进行了仿真比较,证实了这种新的驱动方法的合理性。对于矩阵变换器,运用快速Fourier分析证明了输入滤波器的设计更加简单、有效,造价更加低廉。整个系统与电网的关系显著提高。与电压源逆变器相比,矩阵变换器的这个重要特点以及牢固性强、灵活性能优越等优点都将使其成为未来电源应用场所的新亮点,虽然只做了仿真试验,但为今后国内、外学者的研究提供了宝贵的参考依据。
3.2 交流磁轴承的控制方法
3.2.1 冗余坐标法
韩国的Park S H提出采用冗余坐标法对基于PD控制的交流径向主动磁轴承系统进行解耦,并针对推导的系统公式和提出的解耦控制策略,对系统的数学模型进行了可控性分析。结果表明这种控制器可以使转子实现转速为5 000 r/min的稳定悬浮,并具有良好的动态性能和静态性能[18]。
3.2.2 滑模控制法
西班牙学者Beizama A M 为了分析外部扰动作用于转子的性能,对滑模控制(SMC)和极点配置控制(PPC)下的三极径向磁轴承的性能做了比较[19](图9~图10)。图9~图10表明,极点配置控制的试验结果与仿真结果不太吻合;然而滑模控制法的两个结果却十分相似,证明了滑模控制法具有高可靠性以及几乎不受参数变化和模型动态性能影响的优越性能。台湾学者Chen Shyhleh针对电流控制三极磁轴承转子系统[20],设计完成了3个控制器:线性状态反馈控制器、基于反馈线性化的线性状态控制器、滑模控制器。对3个控制器进行比较后,可以证明滑模控制器可以使系统产生最好的瞬态和稳态性能[20]。
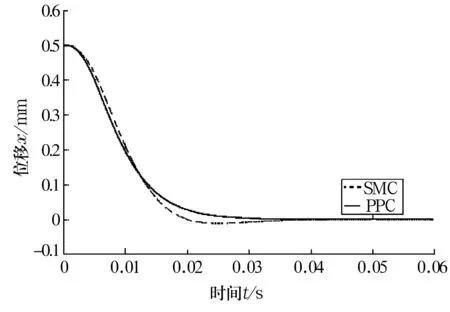
图9 滑模控制与极点配置下的x方向上阶跃响应曲线
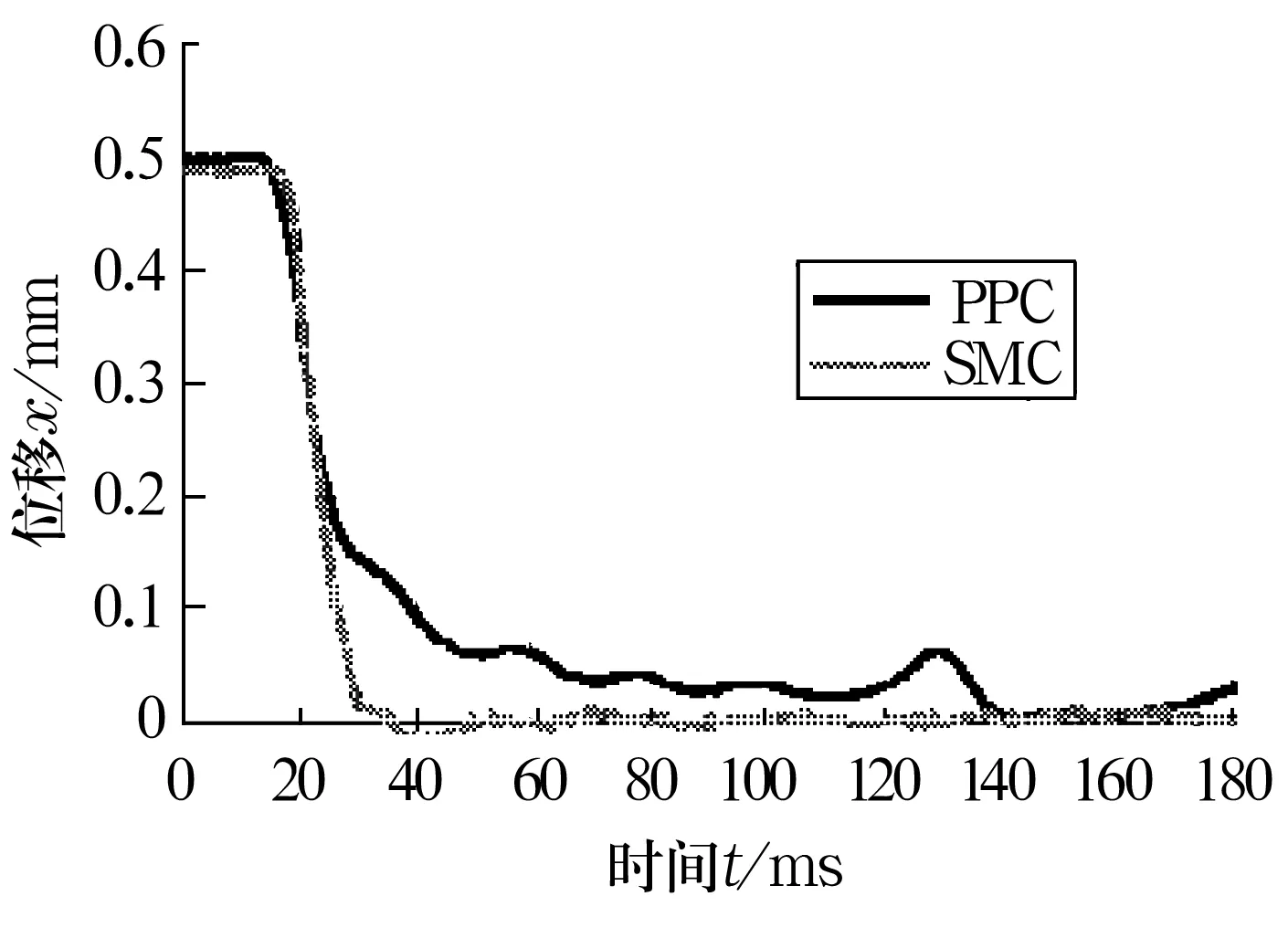
图10 滑模控制与极点配置下的暂态响应曲线
3.2.3 基于INFORM方式的无传感器控制法
基于INFORM方式的无传感器控制法是由奥地利维也纳工业大学的Hofer M 提出,并用于永磁偏置三相混合磁轴承的一种控制方法[21]。INFORM 方法是基于电压注入法来进行转子位置测量的。通过试验,将无传感器INFORM信号与传感器信号进行比较,证明INFORM方法的可行性。测量的对比信号图如图11所示。可以通过改变参数,比如偏置磁通、线圈匝数、铁心长度和转子类型等,对混合磁轴承模型进行优化,进而提高INFORM的控制性能。
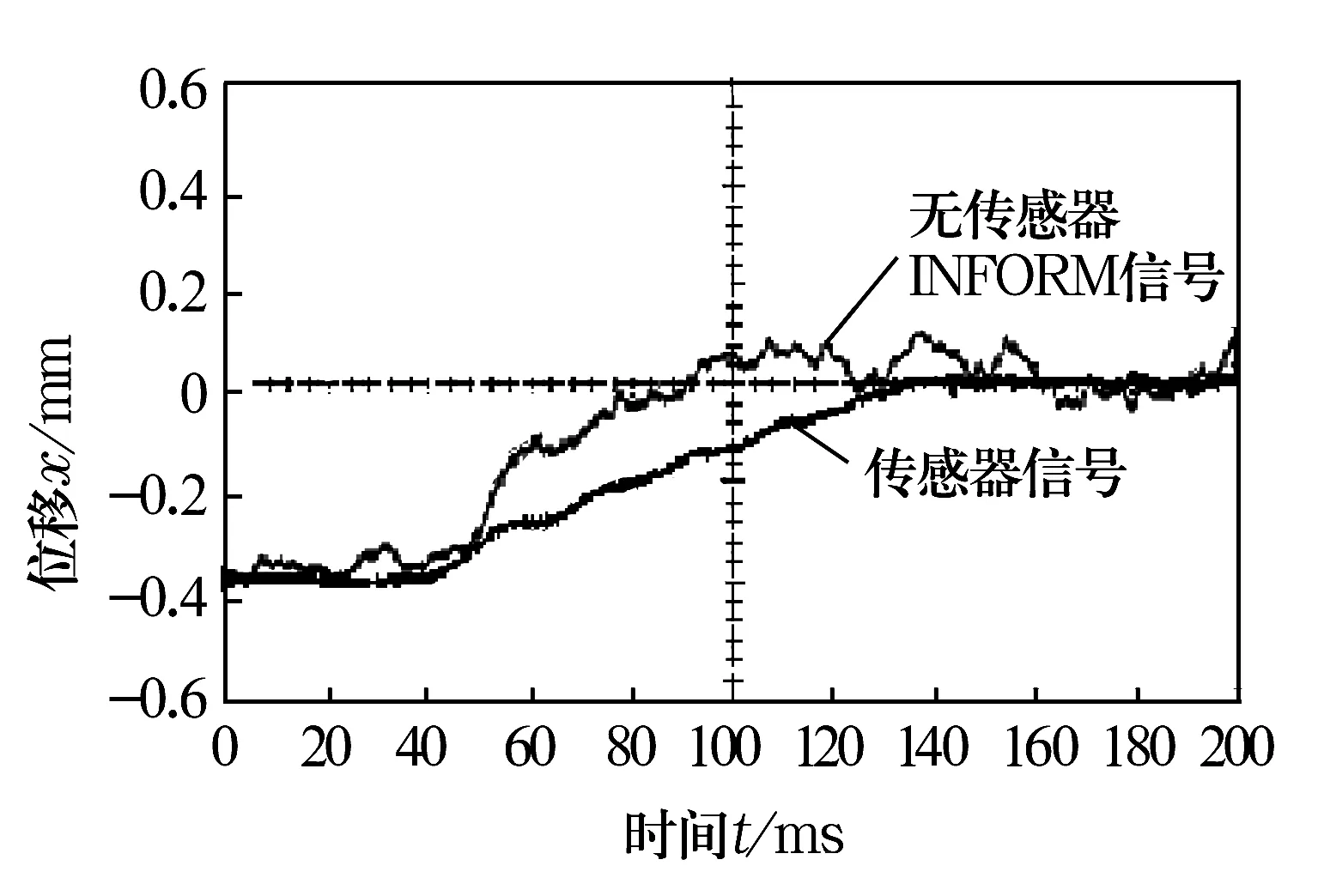
图11 转子由x=-0.4 mm到中心位置的位移信号图
3.2.4 基于卡尔曼滤波器的位移自检测控制法
卡尔曼滤波器的位移自检测控制是由日本九州大学的Matsuda K于2006年提出的[22]。这种方法通过引入卡尔曼滤波器来解决视角偏差问题。为了证明这种方法的有效性,开发了一个用于估算三极磁轴承径向位移和转速的卡尔曼滤波器。通过一个线性功率放大器电路驱动,使电流流入线圈。线圈端部电压以100 Hz的截止频率通过一个模拟的一阶低通滤波器。设计的卡尔曼滤波器运用滤过的线圈电压和控制器输入量作为计算评估的输入;非视角偏差则作为未知状态。卡尔曼滤波器通过测出的输入、输出数据进行数字仿真。结果表明,偏差的确和预测的测量值产生重叠。
3.2.5 传统PID控制法
传统的PID控制法是目前用得最多的磁轴承控制方法,国内江苏大学运用传统PID控制法已经实现多个交流磁轴承试验台的稳定悬浮[6]。比较有代表性的就是交流三自由度混合磁轴承试验台(图12)以及交流两自由度混合磁轴承试验台。
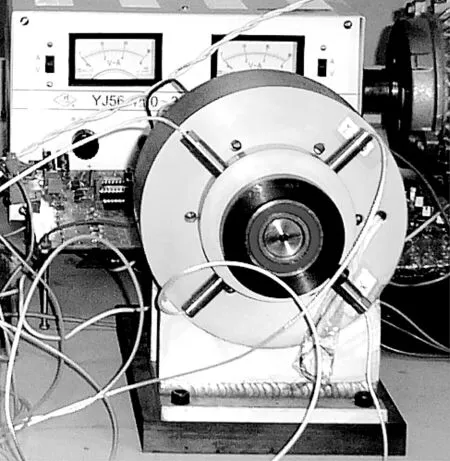
图12 交流三自由度混合磁轴承试验台
4 交流磁轴承的发展趋势
磁轴承技术目前在机械行业及航空航天等领域有部分应用。交流磁轴承的发展趋势主要集中在以下方面。
(1)由于交流磁轴承采用三级结构,其径向两自由度位移控制之间存在耦合。因此,需要采用非线性多变量解耦控制策略,研究实现交流磁轴承高精度多变量的解耦控制。
(2)交流磁轴承无传感器技术研究。通过辨识磁轴承线圈中的电流或电压变化,间接获取位移的变化量,而不需要位移传感器,因此,能降低成本、减小体积、提高系统可靠性,在工业上有很广阔的应用前景。
(3)控制系统的智能化、集成化发展。为了满足磁轴承应用上的高性能、高可靠性和低成本,磁轴承控制系统向数字化、智能化、集成化发展是必然趋势,尤其是电子元器件和机械电子器件的小型化趋势。
(4)交流磁轴承的工业应用。研究磁轴承的最终目的是工业应用,由于具有多种优点,磁轴承的应用行业正迅速从传统的涡轮机械、高速机床等行业向新行业突破,如人工心脏血液泵、干燥机、精密位置平台及计算机硬盘等应用领域。
5 结束语
交流磁轴承具有整体体积小、重量轻、效率高及成本低等特点,在各类悬浮支承领域具有广阔的应用前景。文中从交流磁轴承的系统组成、工作原理、分类及特点、驱动方式和控制方法等不同角度对交流磁轴承进行了详尽分类与比较,分析和讨论了几种典型的交流磁轴承,总结和归纳了目前的控制方法和驱动方式,指出了交流磁轴承的研究发展方向。
