基于新型压电摩擦阻尼器的半主动控制及优化研究
2012-07-19王社良刘苗苗樊禹江李慧亮
王社良,刘苗苗,樊禹江,李慧亮
(西安建筑科技大学土木工程学院,陕西西安 710055)
基于新型压电摩擦阻尼器的半主动控制及优化研究
王社良,刘苗苗,樊禹江,李慧亮
(西安建筑科技大学土木工程学院,陕西西安 710055)
为了研究压电变摩擦阻尼器的半主动控制效果,基于压电陶瓷管状驱动器设计了一种新型的压电摩擦阻尼器,并对所建立的空间杆系结构模型结合遗传算法确定了该阻尼器的最优布置数量及位置。最后对该模型进行了半主动控制仿真实验,得出此模型布置2个阻尼器时能达到较好的控制效果。
压电摩擦阻尼器;半主动控制;遗传算法;优化
结构振动控制已成为有效改善结构性能、提高结构安全性和增强结构抗震性能的重要手段之一。其中,半主动控制是一种根据结构的振动反应或动荷载的信息来实时改变结构参数以减小结构反应的控制方式。结构半主动控制原理与结构主动控制原理基本相同,只是实施控制力的驱动器只需要少量的能源调节,以便使其主动地、巧妙地利用结构振动控制的往复相对速度或者相对变形,尽可能实现主动最优控制力。本文设计了一种新的压电变摩擦阻尼器,并以空间杆系结构为研究对象,对阻尼器的优化布置进行了全面分析。
1 新型压电摩擦阻尼器的结构设计
1.1 设计原理
压电变摩擦阻尼器的工作原理[1]就是利用压电陶瓷驱动器的电致杆件变形来改变摩擦阻尼器的螺栓紧固力,从而调节摩擦片之间的正压力,实现摩擦力的主动实时调节。其中可调紧固力由压电陶瓷驱动器和螺栓性能以及电场强度的大小确定,当压电陶瓷驱动器在电场作用下伸长时,可调紧固力就会相应提高。
1.2 压电变摩擦阻尼器结构设计
图1给出了压电变摩擦阻尼器的总体结构示意图[2-3]。该新型压电摩擦阻尼器主要构造包括摩擦片1、摩擦片2、高强螺栓、高摩擦阻尼涂层、压电陶瓷驱动器以及4个普通螺栓。其中摩擦片1和摩擦片2由两块钢板组成,表面涂有高摩擦阻尼涂层材料以增强摩擦系数。高强螺栓的作用主要是提供该阻尼器所需的预紧固力。当结构振动时,利用压电陶瓷驱动器的逆压电效应来改变摩擦阻尼器的螺栓紧固力,进而调整摩擦片之间的正压力,从而达到半主动控制的目的。

图1 新型压电摩擦阻尼器设计构造图
2 半主动控制结构的运动微分方程
一个具有n个自由度的半主动控制系统,在一维水平地面加速度¨xg作用下运动微分方程为

式中:M、K、C分别为结构体系的质量矩阵,刚度矩阵和阻尼矩阵;X(t)为结构位移反应向量(t)为地面地震输入加速度;F为地震作用位置矩阵,F=-M{I}{I}(表示元素均为1的列向量),U(t)为n维控制力向量;Bs为控制力位置矩阵。当结构采用状态反馈时,控制力U(t)可表示为

将式(3)代入式(2),可得,

由(4)式可知,当改变结构的可变阻尼 ΔC或者可变刚度 ΔK时,等效于在结构上施加一定的控制力,从而达到对结构进行振动控制的目的。
3 基于遗传算法的压电变摩擦阻尼器的布置位置优化
结构半主动控制算法主要是参照主动控制力U(t),考虑半主动阻尼力可能实现的实际情况,尽可能的设定主动变阻尼力接近主动控制力。本文采用最优Bang-Bang变阻尼控制算法[1],可表示为:

公式(5)的意义是:当主动控制力与主动变阻尼控制装置所在位置如结构层间振动方向相反时,施加主动变阻尼控制装置能够提供的最大阻尼系数,否则施加最小的阻尼系数。这一算法正好反映了主动变阻尼控制装置只能施加阻止结构运动的力,而不能施加推动结构运动的力。
在半主动控制中,阻尼器的结构形式以及配置方案不仅对控制效果起着重要的影响,而且直接决定了结构控制系统的稳定性、可控性以及控制的有效性。驱动器位置合理布置可以在较小能耗情况下达到较好的控制效果;反之,不合理的布置会产生控制系统的硬件成本增加、复杂性增加、控制效果降低等弊端,甚至会导致系统不稳定。驱动器的位置优化本质上是选择合适的优化算法使得某一指标函数取得全局最优。
遗传算法(Genetci Algorithms,简称GA)是一种基于自然选择和遗传概念的启发式搜索技术。它起源于对生物系统所进行的计算机模拟研究。遗传算法是一种高效、并行、全局搜索的方法。它使用适者生存的原则,在潜在的解决方案中逐次产生一个近似最优的方案,遗传算法主要包括优化参数编码、初始种群的确定和遗传操作三个步骤。
3.1 控制系统的最优布置准则
性能准则是控制机构位置优化设计的一个很重要的方面。通常按不同设计要求,优化准则主要有:控制代价准则、控制能量准则、性能指标的期望值最小准则、可靠性准则、可控客观性准则等。对于空间杆系结构,耗能器的耗能能力与其相对位移密切相关。所以,本文定义一个阻尼器位置优化准则:

式中:θ表示层间位移角;θ=Δ/H,Δ表示层间位移;H表示层高;θi,max和 θ0,max分别表示有控与无控结构在地震动作用下,第i层最大层间位移角。由公式(6)可知,控制指标越小,表明对结构相应反应量的总体控制效果越好。
3.2 优化步骤
遗传算法的优化流程是一个典型的迭代过程,流程图如图2所示,其基本步骤[4-6]如下所述:
(1)选择编码:采用二进制编码程序,空间杆系结构体系中阻尼器的优化位置用r表示。如果基因值为1,表示此位置放置阻尼器,若基因值为0表示此位置是普通的柱间支撑。因地震作用的方向不确定,所有支撑均采用十字交叉布置。
(2)适应度函数:遗传算法在进行搜索中基本不利用外部信息,仅以适应度函数为依据,利用群体中每个个体的适应度值来进行搜索。
(3)确定遗传策略:包括选择群体大小,选择、杂交、变异方法,以及确定杂交概率PC、变异概率Pm等遗传参数;
(4)随机初始化生成群体P;
(5)计算群体中每个个体的适应度值f(x);
(6)按照遗传策略,运用选择、杂交和变异算子作用于群体,形成下一代群体;
(7)判断群体性能是否满足某一指标,或者已完成预定迭代次数,不满足则返回步骤(6),或者修改遗传策略再返回步骤(6)。
对于一般的遗传算法而言,参数取值范围为:初始种群的大小POP取10~100;交叉概率PC一般取值为0.4~0.99;变异概率Pm取0.0001~0.1。

图2 遗传算法流程图
4 数值计算及分析
4.1 控制模型的建立
本文所用模型为一空间杆系结构模型[7],模型所有杆件尺寸均为外径5 mm,壁厚2 mm的Q235钢管,模型平面尺寸为300mm×400 mm,高度方向为3层,每层层高400 mm,每个节点处均设有1 kg的钢球以模拟配重并方便连接,模型如图3所示。
利用遗传算法工具箱进行优化,适应度函数取为:

其中1/J为调整前的适应度值,p为当前布置的作动器数目,m为预期布置的作动器数目。遗传操作参数取为:群体大小POP取为20,交叉概率Pc=0.85;变异概率Pm=0.03。
本文选取EL Centro波作为输入,采样周期为0.02 s,加速度峰值调为400 gal。

图3 空间杆系结构模型及节点单元编号
4.2 压电阻尼器的优化布置结果
针对空间杆系结构模型,为近似模拟框架结构压电摩擦阻尼器的优化,本文所选用的优化位置均为斜向支撑处,对于此模型,可选择的斜撑位置总共有12个,本文分别选取1-4个阻尼器,通过遗传算法,可以得出不同数目阻尼器的布置位置,如表1所示。为了比较分析结果,选取顶层16节点在x方向的位移,优化前后对比见图4~图7所示。

表1 阻尼器优化布置位置
为了更直观的表示阻尼器的优化效果,现将控制前后最大位移列入表2,其中,x未代表未控状态下16节点沿x方向的位移;x有代表受控状态下16节点沿x方向的位移。

图4 布置1个阻尼器的优化效果图
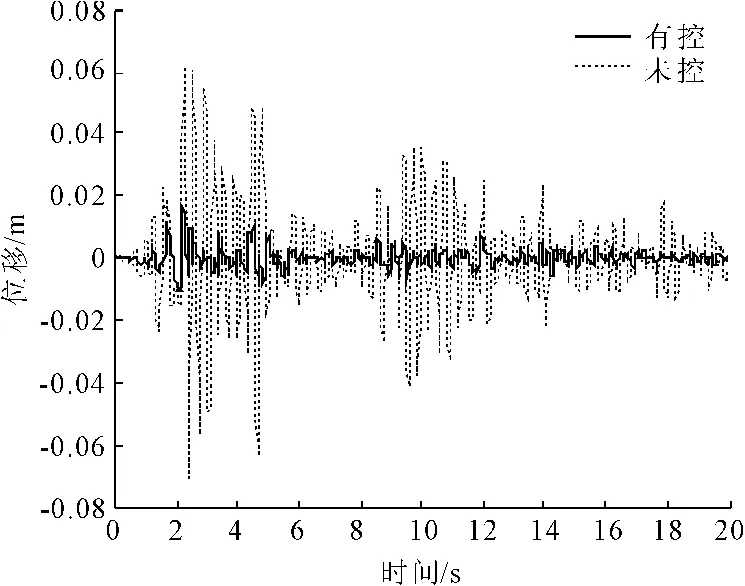
图5 布置2个阻尼器的优化效果图

图6 布置3个阻尼器的优化效果图

图7 布置4个阻尼器的优化效果图

表2 优化效果对比表
由图4~图7及表2可知,针对本文所采用的空间杆系结构,随着阻尼器数量的增加,控制效果越来越好,但当阻尼器个数增加到一定数量时,控制效果增加趋于平缓状态。综合分析,本文选取布置2个阻尼器时,达到最好的优化效果。2个阻尼器优化布置位置为:1-8,3-8,即底层的2个斜向支撑处。
5 结 论
(1)本文设计了一种新型的压电变摩擦阻尼器,此种阻尼器工作原理简单,能够达到很好的半主动控制效果。
(2)采用全局搜索的遗传算法对压电摩擦阻尼器的布置位置进行优化,优化结果与实际情况相符。
(3)通过阻尼器数目与控制效果的关系得出,随着阻尼器数目的增加控制效果增加缓慢,逐渐趋于平缓,对于本文简单的空间杆系结构模型选取2个阻尼器的控制效果比较理想。
(4)对于复杂的框架结构可以简化成类似的空间杆系结构,采用本文所述的遗传算法进行优化,并进行半主动控制,可以取得很好的控制效果。
[1]欧进萍.结构振动控制—主动、半主动和智能控制[M].北京:科学出版社,2003.
[2]王社良,樊禹江,刘苗苗.新型压电摩擦阻尼器动态力学性能的理论分析[J].水利与建筑工程学报,2011,9(3):34-35.
[3]大连理工大学.半主动压电摩擦阻尼器:中国,CN200410020999.2[P].2005-3-16.
[4]韩瑞锋.遗传算法原理与应用实例[M].北京:兵器工业出版社,2010.
[5]林 森,明宝华,周星德,等.框架结构半主动控制优化设计[J].南京工业大学学报(自然科学版),2005,27(3):12-15.
[6]李宏男.基于遗传算法优化阻尼器空间位置的结构振动控制[J].振动与冲击,2006,25(2):1-4.
[7]吕 淼,赵歆冬,丁怡洁,等.三层空间钢架模型模态试验的两种方法对比[J].水利与建筑工程学报,2010,8(3):132-135.
Optimization Research on Semi-active Control Based on New Piezoelectric Friction Damper
WANG She-liang,LIU Miao-miao,FAN Yu-jiang,LI Hui-liang
(College of Civil Engineering,Xi'an University of Architecture and Technology,Xi'an,Shaanxi710055,China)
In order to study the effect of piezoelectric friction damper'semi-active control,a new type of piezoelectric friction damper is designed based on the piezoelectric ceramic driver.Through the establishment of the space truss structure model and by using genetic algorithm,the optimal number and position of the damper are determined.Finally,the simulation experiment about semi-active control is done according to the model,obtaining that the model could gain the better control effect when decorating two dampers.
piezoelectric friction damper;semi-active control;genetic algorithm;optimization
TU392.3
A
1672—1144(2012)05—0048—04
2012-03-05
2012-04-20
国家自然科学基金(51178388);教育部高等学校博士学科点专项科研基金(200807030002);国家自然科学基金重大研究计划(90715003);陕西省教育厅重点实验室项目(08JZ35)
王社良(1957—),男(汉族),陕西西安人,教授,博导,主要从事工程结构抗震及新型智能材料教学与科研工作。
