基于短基线技术的水下目标声学定位技术研究
2012-07-19冯志涛贾立双李家军关宏韬
冯志涛,贾立双,李家军,关宏韬,李 墨
(国家海洋技术中心,天津 300112)
基于短基线技术的水下目标声学定位技术研究
冯志涛,贾立双,李家军,关宏韬,李 墨
(国家海洋技术中心,天津 300112)
针对解决深海定点测量设备布放过程中因定位不准而对回收设备作业造成的困难,参考短基线水下声学定位技术设计了一种构成简单、操作便捷的水下目标水声定位方法。同时,配合开发了相关定位测算软件,简化了操作步骤,提高了准确率,可用于对多数水下定点测量设备的水下准确定位。
声学定位;短基线;声学释放器;VB
水下声学定位技术出现时间早,发展速度快,如今已经广泛应用于海洋工程的各个方面。海洋中水下环境复杂恶劣,因此为水下定点测量设备进行准确的定位,对于掌握设备工作情况、回收海洋监测数据和设备具有非常重要的意义。本文针对水下定点测量设备布放过程中出现的因定位不准而引起的回收阶段海上搜索困难的问题进行了深入细致的研究,设计开发了适用于水下定点测量设备的水下声学定位系统。
1 水下声学定位技术的分类
依据水声定位基线的长度通常将定位系统分为3类:长基线定位系统、短基线定位系统和超短基线定位系统,见表1。

表1 声学定位系统分类
由于长基线定位系统需要在水下布放至少3个以上的应答单元,对于深海区单点布放的水下定点测量设备来说可行性不强;而超短基线定位系统须建立声基阵与船体之间相互确定的坐标方位关系,且在较大水深的条件下精度不高,同时准备工作繁琐,不利于在甲板快速高效地展开定位工作;短基线定位系统构成简单,便于操作,可借助已有的声学通讯装置完成水下目标的测距工作,符合设备回收对于定位方法简洁快速、准确高效的操作要求。本文参考短基线定位技术的原理并加以改进,将固定安装在船体的至少3个换能器同时测距的方式改为利用声学通讯装置甲板单元在至少3个不在同一直线的点进行走航逐一测距定位作业的方式。这样,既充分发挥了短基线定位系统的优势,又避免了在水深较大的情况下由于测距点之间位置接近造成的定位精度降低的不足。
2 水下声学定位系统组成及工作方式
水下定点测量设备的重力锚在下坠的过程中,随着海流的冲击,实际就位点(亦即实际工作点)会与投放点水平方向上有较大的偏差,这为复杂的海况条件下回收设备时基本靠目测搜寻设备增加了难度,如果在3级海况波浪高度超过1 m的情况下甚至有丢失的风险。本系统主要由声学通讯装置及其甲板单元、船载测深仪、GPS和基于VB平台的水下目标定位测算软件组成。
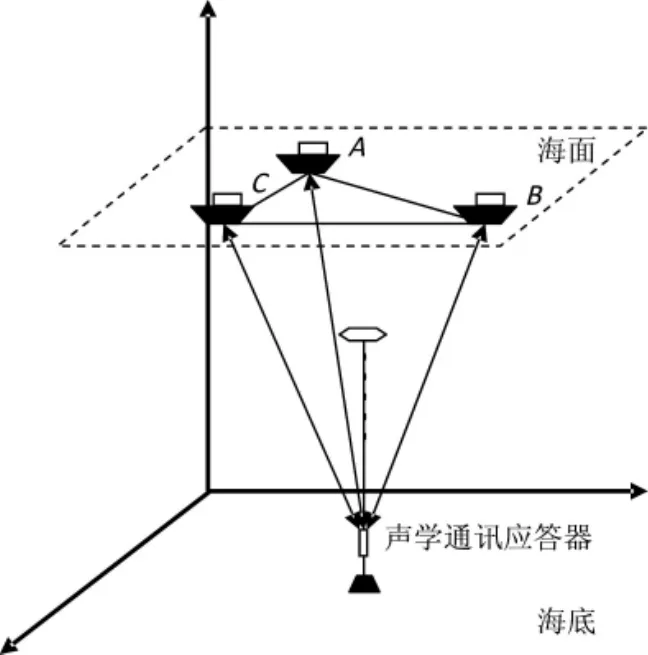
图1 水下目标声学定位工作示意图
利用声学通讯装置甲板单元,通过布放调查船走航分别在不在同一直线的3点与水下的声学通讯装置进行测距,两点之间大约相距2 nmile。通过软件进行一系列的坐标变换及计算,从而得到水下的声学通讯装置的相对位置,由于声学通讯装置与重力锚位置接近,可通过测算水下声学通讯装置的坐标间接获取水下目标的准确坐标。工作示意图见图1。但通过声学通讯装置水下声学定位得到的位置信息仅是一个以定位点为参考点相对坐标,因此需借助GPS定位与水下声学定位相结合的联合定位,将GPS水面高精度定位能力向水下延伸,从而获得接近GPS水面定位精度的水下目标大地经纬度坐标。
3 系统中定位测算软件的定位原理
众所周知,地球整体形状略呈椭球状,在大范围视角情况下观察,海面应是球面的。但是,对于在相对很小范围内进行定位工作,工作区域的海面可视为平面。在此前提下,对于水下目标的空间定位可以通过坐标转换转化为平面的定位,从而简化定位过程。抽取整个定位过程的关键信息进行建模可得到空间直角坐标系,如图2所示(O点为水下目标,O′点为O点在海面的垂直投影点,A、B、C分别为定位点位置)。

图2 定位原理建模空间直角坐标系示意图
为了便于计算,首先将定位点经纬度坐标数据转换为数值型空间坐标。纬度坐标由于每度之间间隔均匀,可直接进行换算得A点纬度坐标:

而沿纬度垂直方向由赤道向两极移动,相邻经度线间间隔会按照一定规律逐渐缩小,其渐变过程基本遵循球面方程的变化规律,因此:

式中:地球相邻纬度间隔为 110 920 m;Ad、Am、As分别为A点纬度坐标的度、分、秒分量;AD、AM、AS分别为A点经度坐标的度、分、秒分量。其它点坐标的换算过程也由此方法可得。由此,已建立可运用数值计算方法和空间解析几何方法进行计算分析的空间直角坐标系。
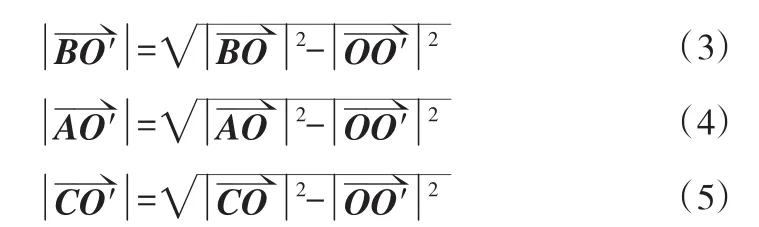

图中包含一个△ABO′,其中AB为定位点距离,向量

点O′与AB的夹角已求出,且圆A的半径可知,至此,已将目标点O′的范围大大的缩小。设∠ABO′为θ,对直线向量夹角公式进行变换:

4 水下目标定位测算软件
水下目标定位测算软件是基于Visual Basic平台开发的,Visual Basic是microsoft公司推出的基于windows环境的计算机程序设计语言,采用面向对象的程序设计技术,将主要精力集中在解决实际问题和设计友好界面,使开发windows程序更迅速、便捷。水下目标测算软件主要负责完成对定位点测距、GPS定位、水深等参数进行分析,并计算水下目标坐标,为用户应用提供友好简洁的操作界面。软件主界面如图3所示。在主界面,用户可以通过输入软件所需的三点的GPS坐标信息、各点与声学通讯装置甲板单元测距值及布放点水深等参数,点击计算即可得到准确的水下目标坐标信息并显示出来,计算结果可利用日志保存功能自动保存到以系统当前时间命名的.txt文件中。同时,软件实时对各键入值进行分析判断,并对逻辑错误、数值类型错误进行报错处理。

图3 定位软件主窗口
在实现软件基本功能基础上,为了增加软件兼容性,开发了坐标数据辅助输入器,负责将不同格式坐标数据转换为主界面所需的可输入格式,并且可通过选择列表框选项直接输入到主界面的对应文本框中。用户只需在主界面点击菜单栏“文件”→“读取辅助器参数”即可读取所有已转换坐标数据(如图4)。

图4 坐标数据辅助输入器窗口
软件还增加了海图显示、保存设置参数和读取设置参数等修饰功能。在海图显示界面中,加载了设备布放点海域海图,并可按比例放大、缩小海图,用鼠标直接拖动海图进行浏览,标记布放点位置。海图显示界面如图5所示。
保存参数功能是为了及时保存定位参数便于日后进行验证而设计的,它将定位所需各参数生成以系统时间命名的.ini配置文件。在进行验证时,点击读取设置参数选择打开需验证的.ini配置文件,即可将各参数读取到对应文本框,如图6。

图5 海图显示窗口
图6 打开测算参数配置文件
5 结束语
利用水下声学定位技术可实现水下定点目标精确定位,从而掌握更加准确的布放点位置信息,为在复杂恶劣的海上进行回收提供了有力的保障。水下目标定位测算软件界面简洁友好,方便用户操作,功能丰富,满足用户多种需求。此项技术应用前景广阔,适用于潜标、海床基等水下定点系泊测量设备。由于潜标系统和海床基系统中集成安装了声学释放器,可完成定位作业中的测距工作,无需额外安装专门的水声通讯装置,因此此项技术在潜标和海床基的定位应用中具有先天的硬件优势。
[1]吴永亭,周兴华,杨龙.水下定位系统及其应用[J].海洋测绘,2003,23(4)∶18-21.
[2]孙树民,李悦.浅谈水下定位技术的发展[J].广东造船,2006,4∶19-24.
[3]高春艳,李俊民,刘彬彬.Visual Basic程序开发范例宝典[M].北京∶人民邮电出版社,2006∶136-144.
[4]罗朝胜,余文芳,余平,等.Visual Basic6.0程序设计教程[M].北京∶人民邮电出版社,2009∶1-51.
Research on Underwater Acoustic Positioning Method Based on Short-baseline Positioning Technology
FENG Zhi-tao,JIA Li-shuang,LI Jia-jun,GUAN Hong-tao,LI Mo
(National Ocean Technology Center,Tianjin 300112,China)
To solve the low accuracy of the positioning operation of deep-sea designated single poll measuring equipment in deployment process,which makes great trouble for the retrievement of equipment.An underwater acoustic positioning method based on the short-baseline positioning technology was designed with simple structure and easy operation.Meanwhile,a positioning calculation software was developed to simplify the operating steps and improve the positioning accuracy.It can be widely used in accurately positioning of most of underwater designated single poll measuring equipments.
underwater acoustic positioning;short baseline;acoustic releaser;Visual Basic
TB56
B
1003-2029(2012)04-0019-04
2012-04-19
国家高技术研究发展计划(863计划)资助项目(2008AA09Z106)
冯志涛(1982-),助理工程师,主要从事硬件电路设计、程序编制及调试工作。