基于水下三维传感器网络的海洋环境立体监测系统关键技术研究
2012-07-19郑君杰刘志华王振力
郑君杰 ,刘志华 ,刘 凤 ,王振力
(1.解放军理工大学,江苏 南京 211101;2.解放军国际关系学院,江苏 南京 210039)
基于水下三维传感器网络的海洋环境立体监测系统关键技术研究
郑君杰1,2,刘志华1,刘 凤1,王振力2
(1.解放军理工大学,江苏 南京 211101;2.解放军国际关系学院,江苏 南京 210039)
深入分析了我国海洋环境监测技术的不足与现实需求,提出一种基于水下三维传感器网络的海洋环境立体监测系统,探讨了系统的组成、架构及其涉及的关键技术。设计了可自主沉浮的水下传感器节点,探讨了水下传感器节点间、系统与控制中心间的通信方式,对网络拓扑结构进行了三维仿真,最后对水下三维传感器网络的应用前景进行了展望。
水下三维传感器网络;水声通信;架构;仿真
我国是海洋大国,海洋环境立体监测技术已经列入国家中长期科技发展纲要[1]。经过多年的发展,我国已建成了包括海洋站、浮标、调查观测船、海监飞机,以及利用国外遥感卫星资料的海洋环境初级监测网,但是和国外相比仍存在严重不足,主要表现在以下几个方面:
(1)缺乏立体探测能力。浮标、潜标、岸基台站、海床基水下固定监测站和船基等定点海洋监测技术只能观测到有限的点、面或层次的海洋水文要素,监测密度远远不能满足需求,没有立体探测能力,且易受恶劣海洋环境制约,观测成本高、时间长,同时难以满足数据传输的时效性、保密性和安全性等要求;
(2)探测种类有限。近年来发展很快的海洋遥感技术虽具有大尺度、快速、同步和高频度动态观测等优点,但目前只能观测到海表面及其以上的一些环境要素,如流场、风场等,且其测量结果在目前的技术条件下可信度仍较低,水下要素难以探测,同时探测结果易受到云量、扫描轨道和探测频率等因素的严重影响[2-4],难以满足现实需求;
(3)机动灵活性差。实时、机动、灵活地获取敏感海域水下温度、盐度等要素的能力明显不足。
无线传感器网络是由密集型、低成本、随机分布的、集成有传感器、数据处理单元和无线通信模块的节点通过自组织方式构成的网络。借助节点中内置的多种传感器对人们感兴趣的各种现象进行探测,最终实现对现实世界全方位的监测与控制,也是下一代互联网远景规划中重要的组成部分[5]。2003年2月,麻省理工大学主办的非营利性技术评论杂志将传感器网络总结为改变未来世界的十种新兴技术之一[6]。传感器网络出现不久由于其低成本、灵活性高等诸多优点受到了各国海洋界的青睐,其应用的范围已经扩展到了海洋。
国外海洋传感器网络研究中最有影响力的当属美国海军的海网[7-8]水下声学网络(Seaweb)。其目的是在军事上可构建可布放的自主分布系统,用于沿海广大区域的警戒、反潜战和反水雷系统,在民用领域可以实施控制、通信和导航功能,节点之间采用水下声学通信技术,见图1。
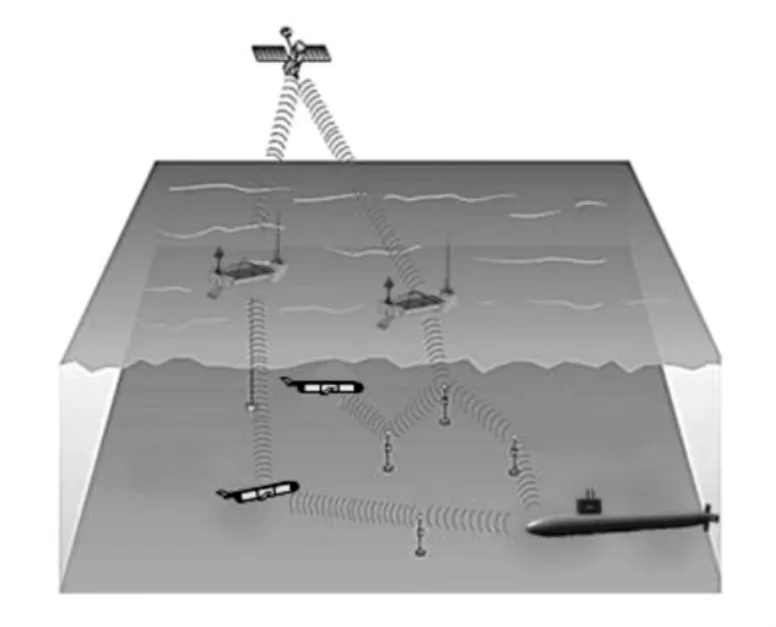
图1 Seaweb示意图
针对我国现有海洋环境监测技术的不足,本文提出了一种基于水下三维传感器网络的海洋环境立体监测系统,针对系统架构、水下节点设计、通信方式、仿真方法等内容进行了深入的研究和探讨。
1 系统架构
针对现实需求,一个有效的海洋水文环境立体监测系统必须满足以下条件:
(1)有很高的灵活性,能够按需求在预定海域快速布撒与组网,能够实时上报探测信息,这在军事上尤为重要;
(2)具备立体探测能力;
(3)可长时间在水下自持工作。
为满足上述要求,本系统由水面网关转发节点、水下传感器节点、通信卫星、无人飞机等部分组成(见图2)。系统工作过程设想如下:
①传感器节点和水面网关转发节点被无人飞机或者船只投放到预定海域海面并进入工作状态;
②水面网关转发节点漂浮在水面,传感器节点利用自身搭载的定位仪完成自身位置的定位并回传位置信息到指挥中心;
③指挥中心收到各个传感器节点的平面位置信息后利用三维拓扑生成算法计算各个传感器节点需要下潜的深度,然后将各个传感器节点需要下潜的深度信息广播给所有传感器节点(该举措是为了确保各个传感器节点的位置信息是互相知道的,水下定位技术目前尚无突破性的进展);
④各个传感器节点收到深度信息后下潜到预定深度构成水下立体监测阵列,节点间采用水声通信技术自动组成水下传感器网络,通过水面转发节点、通信卫星实时向陆地控制中心回送探测数据。(为简化研究,假设传感器节点在水下的位置是固定的,暂不考虑洋流对其造成的位移影响)。
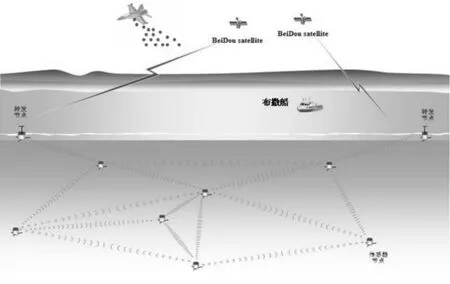
图2 基于水下三维传感器网络的海洋环境立体监测系统架构示意图
2 水下传感器节点设计
水下传感器节点由传感单元、处理单元、无线收发单元和电源单元等部分组成,集成了通信、定位、沉浮、自组网等功能,并提供模块化的传感器通用接口电路,在实际应用中只需通过搭载不同的传感器就可以实现不同的探测功能与任务。
如何实现水下传感器节点在水中的自主运动是一个重要的研究内容。任何物体在水中实现沉、浮运动通常有三种途径:一是改变物体的体积而重量保持不变;二是改变物体的重量而体积不变;三是增加或减少对物体所施加的外力。本研究采用了第一种途径,即节点在水中沉浮是依靠改变其内部体积来实现的。根据这一原理设计的沉浮功能主要依靠液压驱动系统来实现。液压系统则由单冲程泵、皮囊、压力传感器和高压管路等部件组成,皮囊装在节点的外部,有管路与液压系统相连。当泵体内的油注入皮囊后会使皮囊体积增大,致使节点的浮力逐渐增大而上升。反之,柱塞泵将皮囊里的油抽回,皮囊体积缩小,节点浮力随之减小,直至重力大于浮力,节点体逐渐下沉。若在节点的控制微机中输入按预定动作要求编写的程序,则微机会根据压力传感器测量的深度参数控制下潜深度、水下停留时间、上浮等工作环节,从而实现节点的自动沉浮、测量等功能。由于使用无人机布撒,因此节点设计成圆柱状以保证其有很强的抗冲击能力可以直接投入水中无需降落伞减速,系统结构如图3所示。

3 通信技术
系统所涉及到的通信技术包括水下传感器节点间的通信、水面网关节点与控制中心间的通信。
3.1 水下传感器节点间的通信
声波是人类迄今为止已知的唯一能在水中远距离传播的能量形式,水下声学通信是目前唯一投入使用的水下通信方式,典型的应用如美国的海网seaweb计划。目前国内在水下声通信方面以厦门大学、西北工业大学、哈尔滨工程大学为代表的科研单位已经取得了很大的成果,尽管和国外先进水平还存在一定的差距,但是考虑到海洋信息传输的突发性,其传输速率、误码率等指标基本上可以满足水下通信的需要。
传感器网络中节点的无线通信模块处于发送状态时功耗最高,接收状态和空闲状态次之,休眠状态功耗最低,以目前用于无线传感器网络的主流传感器Berkeley Motes为例,其通信模块处于发送状态的功耗为60 mW,接收和空闲状态的功耗均为12 mW,休眠状态下功耗仅为0.03 mW,发送状态和休眠状态功耗比达到2 000∶1。因此将水下节点设计成两种状态:工作和休眠。当处于休眠状态时,传感器电路等模块处于断电状态,只有当到达预先设定的工作深度时上述部件才进入工作状态,一旦工作结束则重新进入休眠状态。通信模块发送完数据后就一直处于低功耗的侦听状态,以上措施可以有效降低能量消耗,延长网络生存时间。
3.2 网关节点与控制中心间通信
水面网关节点与陆上控制中心间可采用的数据传输方式目前主要有卫星通信、流余通信、短波通信等,在前期研究中从安全性、数据传输速率、性价比、传输距离、功耗、成本等几个方面对这几种通信方式已经进行了对比研究。
北斗卫星定位系统的短报文通信能力可以满足水面网关节点与陆上控制中心间的通信需求,其单次可以传输120字节的信息,已经投入业务运行,在国内气象部门已经得到成功的应用[9]。北斗星通公司的OEM模块重量小于300 g,天线体积小,直径仅为5 cm,发射功率10 W,可以满足数据传输需求。北斗二代的首颗卫星于2010年1月17日已经发射成功,预计不久的将来我国将拥有完全自主知识产权的全球卫星定位系统,精度甚至略优于美国的GPS。因此将北斗系统的短报文通信能力应用于海洋水文信息的传输是完全可行且必要的。
流星余迹通信技术具有可靠性高、保密性好、传输距离远等优势,特别适合海洋数据的突发性传播[10]。国内流星余迹技术已经比较成熟。20世纪80年代我国开通了4条实验线路,效果良好。进入21世纪以来国内重新认识到流星余迹通信对未来战争通信保障的重要性,加大了经费投入和科研力度,已经研制出实用化的流星余迹通信系统,可以实现全双工通信,距离达到1 000 km以上,传输速率最高达到64 kbit/s,完全可以满足需求。
除此之外近距离通信200 km以内还可以考虑使用技术上更加成熟的CDMA通信单元、GPRS通信单元等。
4 仿真技术
由于水下传感器网络的实际组网耗资巨大,因此有效的仿真技术就显得尤为重要。现有的传感器网络仿真主要是使用OPNET、NS等仿真软件进行仿真,而这些软件主要是针对陆上无线通信环境而设计的。水下环境和陆地平面环境存在着巨大差异,如水中声音的传输速度只有1 500 m/s,并且随海水的温度、盐度等要素发生变化,因此借用上述仿真软件得到的结果是否可信目前还存在很大的争议,目前主流的网络仿真软件NS运行在unix系统下,源代码开放,但是没有三维仿真能力。课题组深入研究了NS的软件架构,结合开放式图形用户接口OpenGL技术初步设计开发了新的水下三维传感器网络仿真软件[11],建立了三维仿真模型,将仿真结果进行可视化输出,如图4所示。
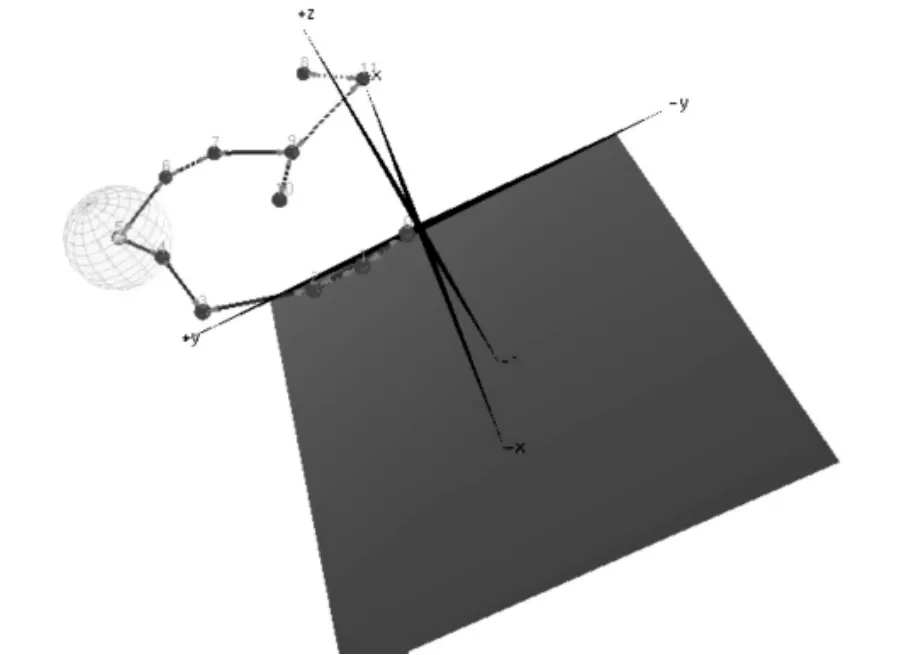
图4 基于OpenGL的水下三维传感器网络三维显示
下一步将继续结合水下声学通信的特征改进该仿真软件进行通信仿真,将分别从数据包交付率,平均端到端延时,总能量消耗等几个方面和现有水下及陆上传感器网络的协议进行对比分析。
5 小结
本文在深入分析我国海洋环境监测技术现状的基础上,提出一种基于水下三维传感器网络的海洋环境主体监测系统。针对该系统设计了自主沉浮的水下节点,探讨了水下传感器节点间、系统与控制中心间的通信方式,开发了新的水下三维传感器网络仿真软件,对水下传感器网络协议进行了初步的三维仿真。下一步将继续结合水下声学通信的特征改进该仿真软件进行相关仿真研究。
[1]中共中央国务院关于实施科技规划纲要增强自主创新能力的决定[M].北京∶人民出版社,2006.
[2]蔡树群,张文静,王盛安.海洋环境观测技术研究进展[J].热带海洋学报,2007,26(3)∶76-81.
[3]徐启阳.蓝绿激光雷达海洋探测[M].北京:国防工业出版社,2002.
[4]刘良明.卫星海洋遥感导论[M].武汉:武汉大学出版社,2005.
[5]J E Smith,F W Weingarten.Research challenges for the next generation Internet[EB/OL].http∶//www.ngi.org/.
[6]T J Werff.Ten emerging technologies that will change the world[EB/OL].MIT's technology review.http∶//www.globalfuture.com/mit-trends2003.htm.
[7]J A Rice,R K creber,C L Fletcher,et al.Seaweb Undersea Acoustic Net[C]//Biennial Review 2001.SSC San Diego Technical Document TD 3117.2001∶234-250.
[8]雷昌有,蒋英.北斗卫星通信在水情自动测报系统中的研究与应用[J].水利水电快报,2005(21):26-28.
[9]周延年,叶松,郑君杰.利用流星余迹通信系统传输海洋数据[J].仪器仪表学报,2008(8):486-489.
[10] 金军,郑君杰,等.水下传感器网络路由协议研究[J].电信科学,2012,28(2):123-128.
[11]郭忠文,罗汉江.水下无线传感器网络的研究进展[J].计算机研究与发展,2010,47(3):377-389.
Study on the Key Technology of Marine Environment Monitoring System Based on Underwater Three-dimensional Sensor Networks
ZHENG Jun-jie1,2,LIU Zhi-hua1,LIU Feng1,WANG Zhen-li2
(1.People’s Liberation Army University of Science and Technology,Nanjing Jiangsu 211101,China;2.Nanjing University of International Relations,Nanjing Jiangsu 210039,China)
The shortcoming and requirement of marine environment monitoring technology in China were summarized and a new system for marine environment monitoring based on underwater three-dimensional sensor networks was introduced.The constitution,system construction and key technologies were discussed and the automated lifting underwater sensor node was designed.The communication mode between underwater nodes,survey system and control center were discussed.At last,the application foreground of underwater three-dimensional sensor networks was prospected.
underwater three-dimensional sensor networks;underwater acoustics communication;construction;simulation
X84,TP212
B
1003-2029(2012)04-0001-04
2012-09-13
江苏省自然科学基金资助项目(SBK2010129,SBK2011124);厦门大学水声通信与海洋信息技术教育部重点实验室开放课题;解放军理工大学气象学院基础理论基金资助项目;解放军理工大学预先研究基金资助项目;中国博士后基金
郑君杰(1977-),博士后,讲师,主要从事水下传感器网络及其应用研究。Email:oldwolf0411@126.com