基于道路工况预测混合动力公交车SOC开环控制策略
2012-07-19朱道伟
朱道伟 ,谢 辉,严 英
(1. 天津大学内燃机燃烧学国家重点实验室,天津 300072;2. 军事交通学院汽车工程系,天津 300161)
混合动力公交车比混合动力轿车在节油和降低排放方面有更大的优势,因此,混合动力公交车成为最理想的城市公共交通工具.保证混合动力公交车具有良好的燃油经济性和排放性能的前提条件是该车不仅有大容量的电池组、确定的运行工况,更需要与运行工况匹配的控制策略[1].
目前混合动力车辆控制策略主要分为以下2类,一类是被动型控制策略,这种控制策略是在保证发动机工作在最佳工作区域的条件下,被动地满足车辆功率需求的一种控制模式.这种控制模式以提高能量流动效率为主要目的,包括开关型控制策略[2]、功率跟随型控制策略[3]以及基本规则型控制策略[4].这些被动型控制策略,通常 SOC都作为混合动力车辆工作模式切换的判断依据.为了满足未来可能的加速或减速可能,通常蓄电池组的 SOC维持在中间区域.根据蓄电池组的充放电特性可知,在中间区域无论充电或放电,效率都不是很理想.而且,这样的后果就使得蓄电池组经常处于充电状态,不仅浪费大量的燃料,较高的 SOC也影响了制动能量的回收.另外一类是主动型控制策略,主动型控制策略就是在注重提高汽车系统内部能量流动效率的同时,再根据行车环境主动减小车辆功率需求、扩大再生制动能量的能量管理模式.这种能量管理模式以减少人(驾驶员)、车、路所组成的大系统能量消耗为主要目的.对主动型控制策略的研究还不多,大部分还仅限于理论和仿真研究.日本学者针对固定线路的道路工况预测采用历史数据库,利用概率的方法预测下一站的道路工况,而且这种预测没有考虑时间因素的影响,存在较大的风险[5].Yoshitaka Deguchi[1]针对这一问题,提出了基于导航系统和历史数据调整蓄电池组的SOC方法,并通过实际的运行数据验证该方法的可行性,该方法比较适用于道路工况变化比较剧烈的情况.另外一些学者利用道路工况识别的方法进行道路工况的预测,这种方法应用对象为长距离的线路,每一段线路有比较鲜明的特征,或者城市工况或者高速工况[6],不太适用于在城市运行的公交车,而且这种方法目前仅限于仿真研究.
笔者提出了一种基于道路工况预测的混合动力公交车充电控制策略,该策略利用预测得到的未来站点间的道路工况计算站点间的需求功率,根据该需求功率来调整对蓄电池组的 SOC,减少不必要的充电过程,降低能量损失.并通过仿真和试验研究表明,该方法可以有效减少混合动力公交车在各个站点的充电时间和充电次数,提高混合动力公交车的燃油经济性.
1 混合动力公交车SOC开环控制策略
1.1 基于SOC闭环的控制策略
基于蓄电池组 SOC闭环的控制策略,控制系统框图如图 1所示.这种控制策略根据当前车速和驾驶员的加速踏板指令计算出当前驾驶员期望的输出功率,同时,还要根据当前的蓄电池组 SOC判断是否位于设定的区间[SOCmin,SOCmax]范围之内,如果SOC高出 SOCmax,就需要对蓄电池组进行放电,利用蓄电池组的放电功率对驾驶员期望的输出功率进行修正,主控制器根据修正后的输出功率给出发动机的油门指令和电动机的扭矩指令;如果 SOC低于SOCmin,就需要对蓄电池组进行充电,利用蓄电池组的充电功率对驾驶员期望的输出功率进行修正,主控制器根据修正后的输出功率给出发动机的油门指令和电动机的扭矩指令.所以,在这种控制策略中,决定蓄电池组充放电的控制参数就是蓄电池组的SOC,使得蓄电池组总是处于频繁的充放电状态.但由于目前的蓄电池组充放电的平均效率在80%左右,甚至还不到 80%.所以蓄电池组的频繁充放电带来很大的能量损失,这种损失最终影响了混合动力车辆的燃油经济性.而造成这个问题的关键就是,不知道未来的道路工况,只能通过维持蓄电池组的 SOC在一个适中水平,才能满足未来可能出现的充电或放电的需要.
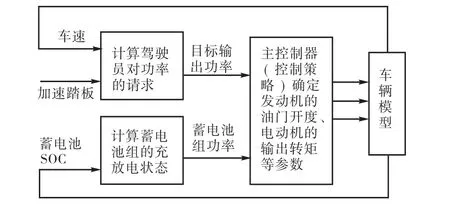
图1 基于SOC闭环的控制策略控制系统Fig.1 Block of SOC closed-loop control strategy
1.2 基于SOC开环的控制策略
基于 SOC开环的控制策略,控制系统如图 2所示.这种控制策略是根据当前的车速和驾驶员的加速踏板指令计算出当前驾驶员期望的输出功率,同时根据当前的 GPS信息和道路工况预测方法,计算得到未来的道路工况及需求功率,利用这一需求功率来确定当前状态下是否需要对蓄电池组进行充放电操作,以及充放电功率,利用充放电功率对驾驶员的期望输出功率进行修正,根据修正后的输出功率计算出发动机的油门开度和电动机的输出扭矩等参数.这种控制策略避开了基于SOC闭环控制策略中设定的SOC工作区间的2个控制参数,同时,对蓄电池组的充放电操作取决于当前的SOC和未来道路工况对驱动功率的需求.
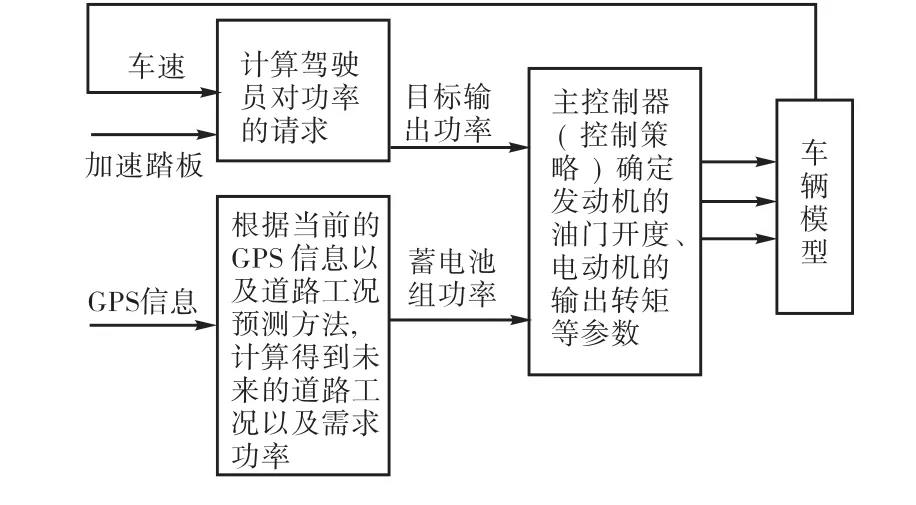
图2 基于SOC开环的控制策略控制系统Fig.2 Block of SOC open-loop control strategy
2 道路工况的预测
对于道路工况的预测是混合动力控制策略优化过程中的难题,因为车辆行驶线路的随机性,导致未来的道路工况不仅受到时间、地点的影响,而且受到驾驶员驾驶习惯、心情等因素的影响.由于不能精确地预测未来的道路工况,很多的主动型控制策略只能是一种理论研究.
城市公交车行驶线路固定,而且相对而言每天的发车时间也是固定的,这样对道路工况的预测提供了可能性.当然城市道路工况,受到时间、天气、人员等条件的影响,很难做到长距离的精确预测,但是可以做到短距离粗略的预测.城市公交车需要在不同的站点停靠以及红绿灯路口等待,这样就把整条线路分为若干段,每一段都可以看作由停车-起步-加速-减速-停车这样的运行过程.公交车在每个站点停靠的时间都可以用来调节蓄电池组 SOC,以满足下一段运行区间驱动率的需求.对公交车道路工况的预测,主要是在各个站点对未来一站地的平均运行速度和最高车速进行预测,可以确定未来一站地的平均需求功率和最高需求功率,根据发动机最佳工作区间的功率与平均需求功率的决定在本站点或红绿灯停靠时间段是否需要为蓄电池组进行充电.
2.1 道路工况预测模型
对混合动力公交车控制策略进行优化,需要提前知道车辆在未来一段时间的平均车速和最高车速,而混合动力公交车最高车速可以经过长时间运行数据统计获得,因此,所需要预测的就是在未来一站地的平均车速.本文针对公交车的运行特点,路线固定,各个站点(红绿灯)间的距离固定,这样车速的预测就转变为对公交车运行时间的预测,包括 2个时间,一个是对各个站点(红绿灯)之间的运行时间进行预测,另一个是各个站点(红绿灯)停靠时间的预测.根据这 2个预测时间可以计算出各个站点(红绿灯)间的运行时间为

式中:i为站点序号;Ti,run为在站点i和站点 i + 1 之间的运行时间,s;Ti+1,arrival为到达站点 i +1的平均时间,s;Ti,dwell为在站点i的平均停靠时间,s;Ti,arrival为实际到达站点i的时间,s.
由于公交车的运行时间受到天气、乘客数量、节假日、时间段等信息的影响,很难建立严格的数学模型通过计算得到,往往是采用一些经验的模型进行预测,BP神经网络具有较强的自我学习能力,能够充分挖掘数据之间的关系,最大限度地逼近非线性复杂系统.采用 BP神经网络来映射输出(公交车到站时间和在各个站点的停靠时间)和输入(GPS、时间、星期等)的关系.
2.2 BP神经网络
BP神经网络[7-9]模型拓扑结构包括输入层(input)、隐层(hide layer)和输出层(output layer).在BP网络中有 2种信号流通:一种是工作信号,它是施加输入信号后向前传播直到在输出端产生实际输出的信号,是输入和权值的函数;另一种是误差信号,网络实际输出与应有输出间的差值即为误差,它由输出端开始逐层向后传播,BP网络(误差反向传播网络)的名称也由此而得.BP神经网络的学习规则是使用最速下降法,通过反向传播来不断调整网络的权值和阀值,使网络的偏差平方和最小.BP网络的结构如图3所示.

图3 BP神经网络结构示意Fig.3 Configuration of BP neural network
经过训练的神经网络提取了蕴藏在样本中的非线性映射关系,并以权值的分布形式贮存起来.在运行阶段,当向神经网络输入样本时,它便能完成从输入的 n维空间到输出的 m维空间的任意非线性映射,从而正确描述无法用数学关系来描述的规律.
根据 Kolmogrov定理的结论,经过充分学习的BP 3层网络可以逼近任何函数,选择3层网络.利用公交车运行时间、GPS信息、日期信息、预测下一区间的公交车运行时间和当前站点的停靠时间,为车速计算提供时间信息.
由于输入信息的差别非常大,同时为了加快神经网络的学习速度,首先要对输入、输出进行归一化处理,使输入、输出向量转化为均值为0,方差为1的向量,在神经网络输出端再将神经网络的输出进行反归一化后处理,以便于和样本中的期望值进行比较.
2.3 天津市内环600路公交车道路工况
天津市内环600路公交车(见图4),依次经过天津站后广场—汇和家园—秋实园—新开路—小树林—十字街—望海楼—东马路—北门—西北角—南马路—天津商场—长江道—今晚报大厦—海光寺(南京路)—鞍山道—滨江道—长沙路—湖北路—小白楼—大光明桥—华北医院—李公楼—李地大街—秋实园—天津站后广场共26站,途中共设有44处红绿灯.整条线路约为 16.7,km,平均运行时间为65,min.该线路的特点就是平均运行速度低、车辆频繁启停.图 5为天津市内环 600路公交车各站点间的距离,由统计的数据可以看出,公交车站点(红绿灯)之间平均距离约为 200,m,最长的一段运行区间仅为 982,m,最短的一段运行区间仅为 65,m,这是导致公交车辆在行驶过程中的频繁启停的根本原因.

图4 天津市内环600公交车路运行线路Fig.4 Stations of No. 600 bus of Tianjin

图5 天津市内环600路公交车站点间的距离统计Fig.5 Distance between stations of No. 600 bus
根据600路公交车运行时间的统计,可以把公交车的运行时段分为高峰期和非高峰期,高峰期包括工作日的 7:00—9:00、17:00—19:00 以及休息日的10:00—5:00;非高峰期包括工作日的 7:00以前、9:00—17:00、19:00 以后的时间、休息日的 10:00以前和17:00以后的时间.
综合分析各种影响因素,选择GPS信息、运行时间信息、星期信息作为神经网络的输入,对这 3种信息进行归一化处理.
(1) GPS信息 GPS信息是为了确定当前站点是哪一个站点,采用分类的方法表示,26个站点分别用 w={0,1,2,…,26},第 1个站点用 0表示,第 2个站点用1表示.
(2) 运行时间信息 根据车辆的运行信息,把所有的运行时间分为高峰期和非高峰期 2种,用 v={0,1}表示,0表示当前的运行时间为高峰期,1为非高峰期.
(3) 星期信息 一周的7天分为2类,工作日和非工作日,用 s={0,1},0表示当前的星期信息为工作日,1表示当前的星期信息为非工作日.
2.4 600路道路工况的预测
利用训练完成的神经网络,选取了内环600路公交车 80个循环的历史数据,分别对公交车的到站时间、站点停靠时间和站点间的运行时间进行了预测,并根据式(1)进行计算,得到各个站点间的运行时间,实际值与预测值之间的差值如图6所示.

图6 站点间运行时间与预测值差值Fig.6 Difference between the running interval and thepredicted value
由图6可知各个站点间的实际运行值与预测值的差值集中在[-10,10]的范围内,可以用于公交车车速的预测计算.根据车速、时间和距离的关系,公交车实际车速预测的平均运行车速之间的差值如图7所示.

图7 公交车实际车速与计算车速差值Fig.7 Difference between the actual velocity and the calculated value
由图 7中可以看出,计算车速与实际车速的差值主要集中在[-4,4]的区间,而且在一些区间出现了较大的偏差,差值到达 11,km/h,分析其原因在于车辆在运行过程中出现了堵车的偶然现象,公交车在较短的距离内运行了较长的时间.但是,总体来说,利用神经预测的运行时间可以较好地预测未来一段时间内的公交车运行速度,同时也存在一些小概率事件发生的可能.
3 仿真与试验研究
3.1 仿真研究
利用Matlab中Simulink搭建完成了控制策略仿真模块,该模块主要包括 BP神经网络的预测模块和发动机功率调整模块.利用神经网络培训得到的公式嵌入BP神经网络模块中,预测得到未来的平均车速和在该站点的停靠时间.确定是否需要为蓄电池组充电,同时输出充电功率.发动机功率调整模块根据充电功率、发动机当前的转速和转矩,调整发动机的开度.
为了便于对比,对基于 SOC闭环的控制策略的混合动力公交车进行数据采集,公交车在部分站点的充放电过程如图 8所示.在停车状态下,即使当前的SOC等于 0.7,仍然对蓄电池组进行充电.采用这种策略的方法原因在于,与其让发动机怠速运行,浪费燃料,不如利用原本怠速运行的时间为蓄电池组充电,只要SOC的值没有超过设定值的上限.
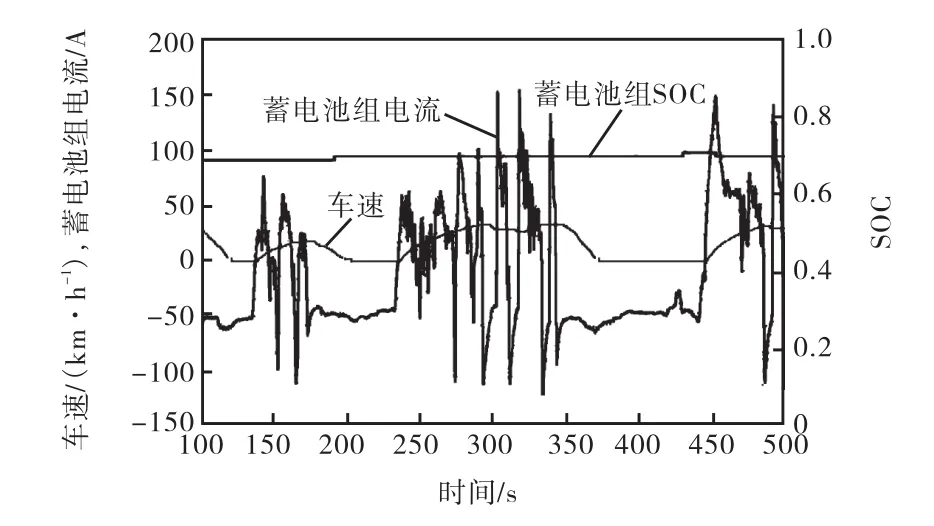
图8 公交车车速、蓄电池电流和SOC的时间历程Fig.8 Time history of bus velocity,current and SOC of battery
将该车的实际运行工况作为数据源输入到仿真平台,研究基于 SOC开环控制策略的发动机的工作情况、蓄电池组的充放电情况.此时仿真条件为:蓄电池组的工作区间[0.4 0.8],蓄电池此时的 SOC为0.5,仿真结果如图9和图10所示,由图11标出的区域可以看出,前一个站点停靠时间为 40,s,后一个站点的停靠时间为 15,s.虽然此时蓄电池的 SOC为0.5,但蓄电池组的能量能够满足未来加速对蓄电池组能量的需求,因此混合动力公交车这2个站点就关闭了发动机.同时在 2个站点之间的一些红绿灯由于停靠时间太短,所以发动机处于运行状态,同时为蓄电池组进行了充电.
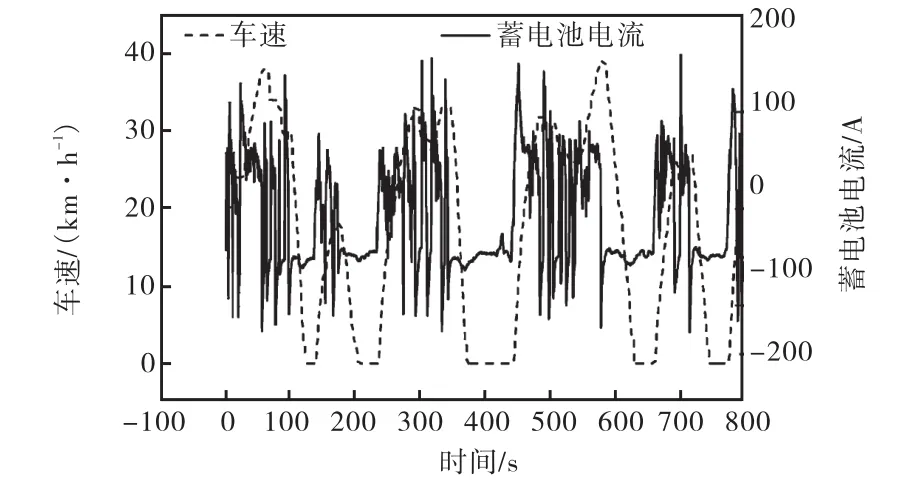
图9 蓄电池电流、车速时间历程Fig.9 Time history of velocity and current of battery

图10 部分站点的发动机的启停指令Fig.10 Instruction of engine at some stations
对600路公交车整条线路采用该策略,充电次数减少19次,相对于混合动力公交车采用基于SOC闭环的控制策略实际百公里燃油消耗量,百公里燃油消耗降低4%.
3.2 试验研究
试验对象为一台混合动力公交车,系统结构如图11所示,混合动力客车照片如图 12所示.这是一款典型的串联式混合动力车辆,动力系统包括发电机组及其控制器、蓄电池组及其控制器、电动机及其控制器、主控制器,以及其他的车辆附属设备,控制系统之间通过 CAN总线进行通讯.图 13为该车安装的天津大学混合动力电动汽车主控制器,该控制器采用分层的软件架构,通过更换能量管理模块,可以应用于HEV客车、HEV轿车和EV轿车.软件模块中具有基于 CAN通信的维护模块,与连接于 CAN上的标定工具或车载信息单元进行通信,实现控制参数的在线或无线远程下载标定[10-12].
把仿真模型中设计的控制策略应用于混合动力公交车实际运行过程,公交车运行 3,736,s,行驶里程16.6,km,消耗燃油 4,780,g,约合 32,L/100,km,车速时间历程如图 14所示,部分需求功率,发动机功率和蓄电池组功率的时间历程如图 15所示.由于采用了 SOC开环控制策略,在车辆运行的过程中,发动机为蓄电池组的充电过程明显减少,充电次数由原来的63次减少为46次,充电时间由原来的2,100,s减少为 1,400,s,由于充电时间的减少带来的百公里油耗降低了3%.
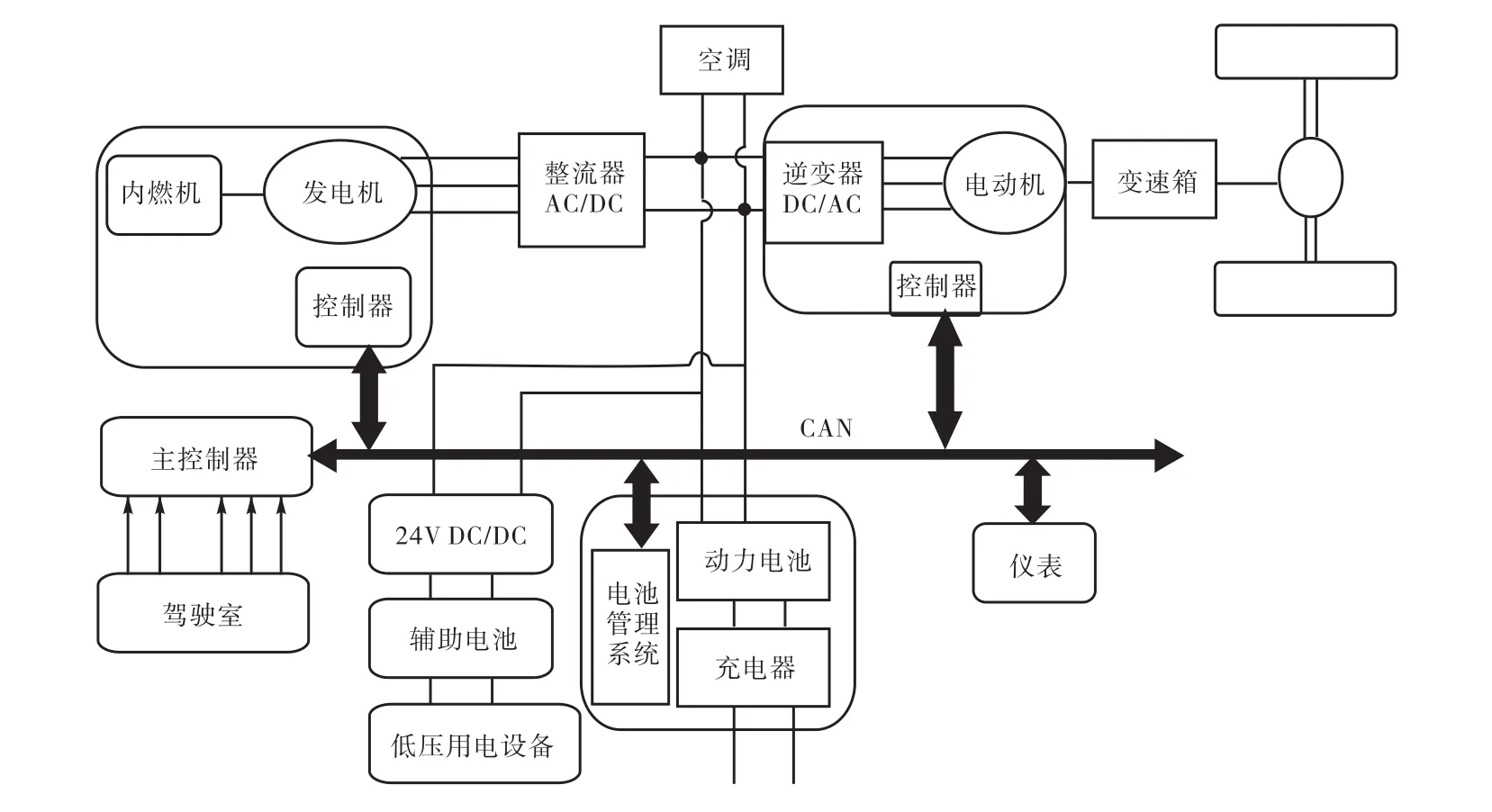
图11 混合动力客车系统结构Fig.11 Power train configuration of hybrid electric bus

图12 混合动力公交车实物Fig.12 Photo of hybrid electric bus

图13 混合动力电动汽车主控制器Fig.13 Photo of hybrid electric bus controller

图14 采用SOC开环控制策略公交车的车速时间历程Fig.14 Velocity time history based on SOC open-loop control strategy
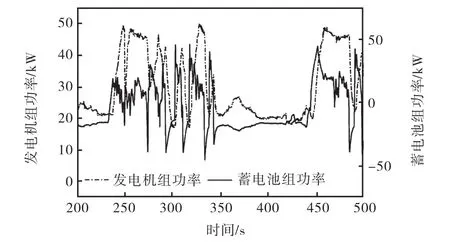
图15 部分发动机功率、蓄电池功率的时间历程Fig.15 Time histories of engine power,battery power
4 结 论
(1) 基于 SOC闭环的混合动力控制策略中,SOC作为混合动力控制策略中的控制参数,往往导致很多不必要的充电过程,基于 SOC开环的控制策略能够有效减少不必要的充电过程,提高混合动力车辆的燃油经济性.
(2) 道路工况预测是实现基于SOC开环控制策略的关键,针对公交车的运行特点,利用 BP神经网络对公交车的站点停靠时间、站点间停靠时间进行预测,并计算出未来站点间的平均运行车速,从预测结果和实际运行结果对比来看,误差基本处于[-4,4],可以用来预测公交车的道路工况.
(3) 在天津市内环600路线路上,对基于道路工况预测的混合动力公交车SOC开环控制策略进行了试验研究,研究结果表明,采用这种控制策略可以显著降低充电时间和次数,由于充电时间的减少带来的百公里油耗降低了,3%.
[1] Yoshitaka Deguchi,Kouichi Kuroda,Makoto Shouji,et al. HEV charge/discharge control system based on navigation information[C] // SAE International Congress. Detroit,USA,2004-21-0028.
[2] Anderson C,Pettit E. The effects of APU characteristics on the design of hybrid control strategies for hybrid electric vehicles[C] // SAE International Congress. Detroit,USA,1995:950493.
[3] Johnson V H,Wipke K B,Rausen D J. HEV control strategy for real-time optimization of fuel economy and emissions[C]// Future Car Congress. Crystal,USA,2000-01-1543.
[4] Nashal J,Naim A. Kheir M S,et al. A rule based energy management strategy for a series hybrid vehicle[C]//Proceedings of American Control Conference.Albuquerque,USA,1997:689-693.
[5] Ichikawa S,Yokoi Y,Doki S,et al. Novel energy management system for hybrid electric vehicles utilizing car navigation over a commuting route[C]// Intelligent Vehicles Symposium. Parma,Italy,2004:161-166.
[6] Montazeri-Gh M,Ahmadi A,Asadi M. Driving condition recognition for genetic-fuzzy HEV control[C]//3,rd International Workshop on Genetic and Evolving Fuzzy Systems. Witten-Bommerholz,Germany,2008:65-70.
[7] 王晓敏,刘希玉,戴 芬. BP 神经网络预测算法的改进及应用[J]. 计算机技术与发展,2009,19(11):64-67.Wang Xiaomin,Liu Xiyu,Dai Fen. Improvement and application of BP neural network forcasting algotithm[J]. Computer Technology and Development,2009,19(11):64-67(in Chinese).
[8] 王建平,郭 尚. BP 神经网络预测算法性能的改进策略[J]. 微电子学与计算机,2007,24(10):144-145,149.Wang Jianping,Guo Shang. Improvement strategies of the neural network algorithm performance[J]. Microelectronics and Computer,2007,24(10):144-145,149(in Chinese).
[9] 杜华英,赵跃龙. 人工神经网络典型模型的比较研究[J]. 计算机技术与发展,2006,16(5):97-99.Du Huaying,Zhao Yuelong. Comparison and research of artificial neural networks[J]. Computer Technology and Development,2006,16(5):97-99(in Chinese).
[10] Zhuang Jihui,Xie Hui,Yan Ying. Research and development of electric vehicle data collection and calibration platform based on GPRS and INTERNET[C]//Vehicle Power and Propulsion Conference.Harbin,China,2008:380-381.
[11] Zhu Daowei,Xie Hui. Control strategy optimization of the hybrid electric bus based on remote self-learning driving cycles[C]//Vehicle Power and Propulsion Conference. Harbin,China,2008:270-271.
[12] 朱道伟,谢 辉,严 英,等. 基于道路工况自学习的混合动力城市客车控制策略的动态优化[J]. 机械工程学报,2010,46(6):33-38.Zhu Daowei,Xie Hui,Yan Ying,et al. Control strategy dynamic optimization of the hybrid electric bus based on driving cycle self-learning[J]. Chinese Journal of Mechanical Engineering,2010,46(6):33-38(in Chinese).
