混合动力城市客车整车控制系统的开发*
2012-07-19赵治国孙泽昌
胡 斐,赵治国,孙泽昌
(同济大学汽车学院,新能源汽车工程中心,上海 201804)
前言
混合动力城市客车整车控制系统包括能量管理策略和动力协调控制。能量管理策略的任务是根据驾驶员的操作,在保证驾驶员需求和动力性的前提下,协调各动力源的输出,降低油耗、减少排放;动力协调控制的作用是针对本文的动力系统结构,通过协调控制主驱动电机的转矩输出,实现AMT换挡的动力不中断,提高整车的舒适性和动力性。
1 动力系统结构与整车控制器
混合动力城市客车动力系统简图见图1。该动力系统包括发动机、集成起动发电机(ISG)、电控离合器、电控机械式自动变速器(AMT)、主驱动电机和由铅酸蓄电池与超级电容并联组成的储能系统。
整车控制器(hybrid control unit,HCU)一方面通过总线CAN_A[1]与发动机控制器(ECM)和AMT控制器(TCU)进行通信,另一方面通过总线CAN_B[2]与 ISG 控制器(ISGC)、主驱动电机控制器(DMC)和电能管理单元(EEMU)进行通信。同时,HCU输入钥匙、踏板和挡位等信号。
2 整车控制策略
2.1 能量管理策略
2.1.1 工作模式划分
根据驾驶员的操作,混合动力城市客车的工作模式如表1所示。
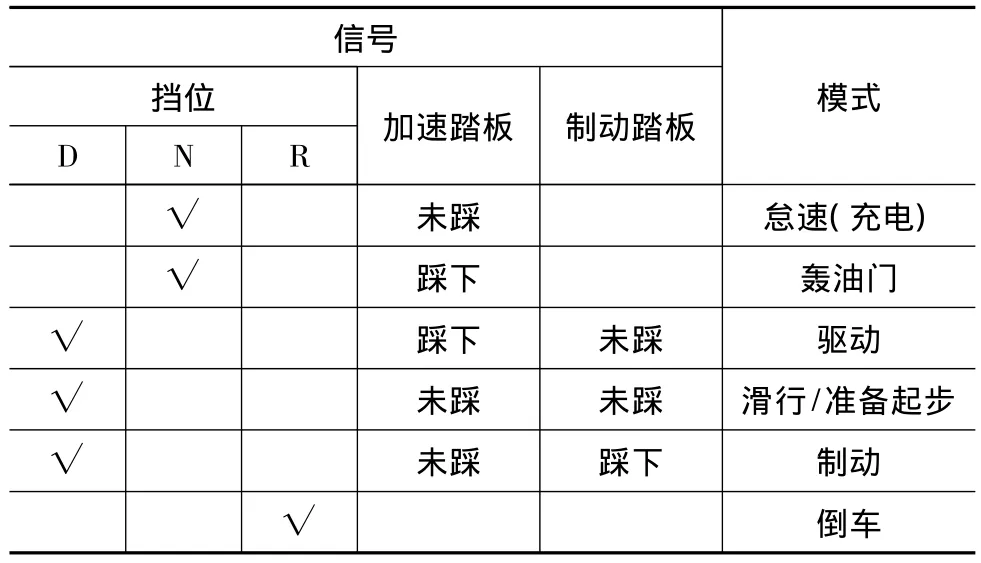
表1 混合动力城市客车的工作模式
2.1.2 怠速充电模式
一方面,由于所开发的混合动力城市客车没有实现辅助系统的电动化,空调、助力转向和气泵等仍需发动机驱动,故不能实现发动机怠速停机;另一方面,根据中国典型城市公交循环[3],怠速时间在整个循环中的比例达29.0%,且实测[4-5]所配柴油机怠速油耗为1.8L/h,因此,怠速充电模式对燃油经济性的提高具有重要意义。
怠速充电模式下,发动机带动ISG发电,机械能被转化成电能存储在储能系统中。此时,系统能量流动方向为:发动机→ISG→储能系统。因此,若要使整个系统的效率最高,应综合考虑发动机、ISG和储能系统的效率,且
式中:ηidcha为怠速充电模式下系统的总效率;ηeng、ηISG和ηescha分别为发动机效率、ISG发电效率和储能系统充电效率。
根据台架试验得到的发动机万有特性和ISG效率图,综合储能系统的效率,绘制怠速充电模式下系统的总效率曲面如图2所示,效率最高点即为最优怠速点。
2.1.3 驱动模式
定义需求转矩Tr为AMT输入轴转矩,且
式中:α为加速踏板行程(0~100%);Temax为发动机最大转矩;Tmmax为主驱动电机最大驱动转矩;ig为AMT速比;K为调整系数,且
式中:v为车速;SOC为荷电状态。
根据台架试验得到的发动机万有特性图,将发动机工作区划分为3个部分,如图3所示。
(1)Te,low以下区域为发动机低负荷区,燃油经济性差。当需求转矩在此区域时,ISG发电对发动机进行转矩提升,以避免发动机工作在此区域。
(2)Te,high与 Te,low之间区域为发动机经济区。当需求转矩在此区域时,车辆由发动机单独驱动。
(3)Te,high以上区域为助力区。当需求转矩在此区域时,发动机和主驱动电机同时参与驱动。
驱动工作模式划分如表2所示。表中,v0为临界车速,当车速低于v0时,车辆为纯电动起步或者串联混合动力模式,发动机不直接参与驱动;SOClow和SOChigh分别为SOC的下限值和上限值。当SOC低于SOClow时,ISG发电;当 SOC高于 SOChigh时,主驱动电机参与驱动。
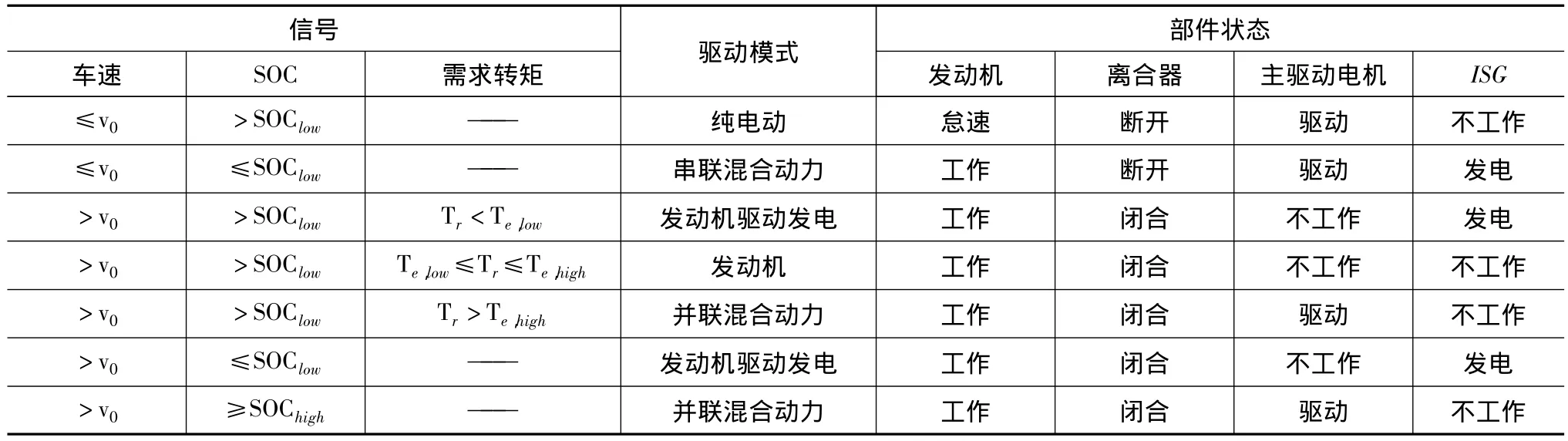
表2 驱动工作模式划分
2.1.4 制动模式
制动模式下,控制策略应在保证安全性的前提下尽可能多地回收制动能量。
车辆制动时,最大地面制动力Fxbmax为
式中:φ为附着系数;Fz为各车轮法向载荷之和,且对于后轮[6]有
式中:G为车重;L为轴距;a为质心至前轴中心线的距离;z为制动强度;hg为质心高度。
式中:r为车轮半径;i0为主减速器速比。
由于所开发的混合动力城市客车制动系统为并联复合制动系统,且制动踏板信号为数字量,故制动模式下电机制动力矩为
式中:Tmmax为主驱动电机当前最大制动转矩;C1为驾驶感和舒适性决定的系数,范围为0~1;考虑到低转速下电机铜损和铁损等功率损耗可能超过其回收的能量,定义调整因子C2如图4所示,图中,ω为电机转速,ω1为制动能量回收截止点转速,ω2为制动能量回收下降点转速。
2.2 动力协调控制
在所开发的混合动力城市客车动力系统中,主驱动电机位于AMT之后,故可在换挡过程中协调控制主驱动电机的输出转矩,使驱动轴的动力不中断,从而提高舒适性和动力性。
控制目标是保证驱动轴转矩Tdrive在换挡过程中保持不变,且
式中:Te为发动机转矩;Ti为ISG转矩;Kc为离合器状态,1为接合,0为分离;Tm为主驱动电机转矩。
换挡过程中,HCU 根据 Te、Ti、Kc、ig和换挡开始时刻的驱动轴转矩Tdrive0,控制主驱动电机输出力矩为
3 软件实现与实车试验
3.1 软件实现
整车控制器HCU软件开发的主要步骤如下:
(1)基于Simulink和Stateflow开发整车控制策略[7],建立mdl文件,并嵌入到整车模型中进行仿真和验证;
(2)基于 EmbeddedTargetforMotorola MPC555[8-9],在以上 mdl文件中添加 MPC555 配置模块、CCP模块、I/O模块和CAN模块等;
(3)基于Real-Time Workshop Embedded Coder,配置Solver和 RTW[10],编译生成 s19文件和 a2l文件,完成图形模块到控制器代码的自动转化;
(4)基于CANape,将s19文件通过CAN总线下载至整车控制器,同时使用a2l文件完成信号测量和参数标定[11]。
所开发的整车控制系统包括输入模块、输出模块、整车控制模块、故障诊断模块、控制器配置模块、CCP模块和看门狗模块等。
3.2 实车试验
实车试验如图5所示,图5(a)为试验现场,图5(b)为整车控制器与CANape连接实物图;信号测量、参数标定与车速跟踪界面如图6所示。
图7为能量消耗量试验结果(清晰起见,这里只给出单个循环),动力协调控制结果如图8所示,发动机工作点分布如图9所示。
由图7可见,在HCU的协调控制下整个循环工况的运行过程中:(1)实际车速很好地跟踪了循环车速;(2)主驱动电机实现了起步、助力、制动能量回收和动力协调等功能;(3)超级电容与蓄电池的并联使用,有效克服了蓄电池不支持大充放电电流、低比功率等不足,提高了整车加速性能和制动能量回收效果;(4)储能系统能量维持情况良好,起步和助力等工况所消耗的电量在怠速发电、制动能量回收和小需求转矩等工况下得到了有效补充。
从图8可见,在HCU的控制下,AMT换挡时动力未中断。动力协调控制过程如下:(1)换挡开始,发动机转矩降为零,主驱动电机输出转矩进行补偿,使驱动轴转矩不变;(2)TCU对发动机进行转矩控制,发动机转矩波动,主驱动电机输出转矩随之变化,使驱动轴转矩不变;(3)离合器分离,主驱动电机输出转矩进行补偿,且转矩值恒定,使动力不中断;(4)摘挡后升挡;(5)离合器结合,发动机转矩逐步介入,主驱动电机转矩随之减小,使驱动轴转矩不变。
从图9可见,在HCU的协调控制下,发动机工作点分布良好:(1)大部分发动机工作点集中在Te,high与 Te,low之间的经济工作区;(2)当需求转矩较小时,ISG发电对发动机进行转矩提升,避免了发动机工作在低负荷区,同时对储能系统进行充电。
根据相关国标,对实车进行了经济性[3-5,12]、动力性[13]和排放测试[14],结果如表 3 所示。
在整车控制系统的控制下,相比于原型车,混合动力城市客车经济性提高了25.65%,动力性提高了16.96%,排放也得到了改善。

表3 实车测试结果
4 结论
(1)混合动力城市客车的整车控制系统实现了对车辆的良好控制。
(2)分析了混合动力城市客车的怠速充电模式、驱动模式(包括纯电动模式、串联混合动力与并联混合动力模式)和制动模式,给出了各模式下的控制策略,并开发了HCU软件。
(3)通过调节主驱动电机的输出转矩,实现了AMT换挡时的动力不中断。
(4)实车试验表明,相比于原型车,所开发的HCU使混合动力城市客车经济性提高了25.65%,动力性提高了16.96%,排放也有所改善。
[1]SAE J1939—71.Surface Vehicle Recommended Practice[S].2006.
[2]王侃伟,方宗德,赵治国.混合动力汽车CAN总线应用协议研究[J].计算机工程与应用,2007,43(8):221 -224.
[3]GB/T 19754—2005.重型混合动力电动汽车能量消耗量试验方法[S].2005.
[4]CORRSYS-DATRON.DFL3x-5bar User's Manual[G].
[5]CORRSYS-DATRON.DAS-3 User's Manual[G].
[6]吴光强.汽车理论[M].北京:人民交通出版社,2007:73.
[7]MathWorks.Automotive Advisory Board,Control Algorithm Modeling Guidelines Using MATLAB,Simulink,and Stateflow[G].Version 2.0,2009.
[8]Freescale Semiconductor,Inc.MPC555/MPC556 User's Manual[G].Revised 15 October 2000.
[9]MathWorks.MATLAB Help:Embedded Target for Motorola MPC555[G].Version 7.0.4,2005.
[10]朱敏晔,赵治国,萧蕴诗.基于MPC555的HEV控制系统开发[J].华东交通大学学报,2007,24(4):101 -103.
[11]Vector Informatik GmbH.CANape User's Manual[G].
[12]Yokogawa.WT3000 Precision Power Analyzer User's Manual[G].
[13]GB/T 19752—2005.混合动力电动汽车动力性能试验方法[S].2005.
[14]HORIBA.OBS-2200 User's Manual[G].
[15]国家机动车产品质量监督检验中心(上海).FDG6111HEVG试验报告(编号:SW1100003N000)[R].2011.