运动目标模拟系统设计
2012-07-17徐敬卿姚晓嘉
任 路,徐敬卿,姚晓嘉
(1.中北大学仪器科学与动态测试教育部重点实验室,山西太原030051;2.中国北方发动机研究所,山西大同037036)
目前,光电跟踪系统已经成为火炮、飞机、导弹和舰艇的“眼睛和神经”,其跟踪精度直接决定了武器装备的打击准确率。因此,对光电跟踪系统的检测就显得尤为重要。但是,如果都采用真实目标给武器提供测试信号,不仅要花费大量的人力、物力和财力,而且可能还会延长武器的研制周期,甚至在某些情况下是无法实现的。为此,现在普遍采用目标模拟调试技术进行光电跟踪系统的检测。
振镜式激光扫描运动目标模拟技术是设计振镜式激光扫描运动目标模拟系统的核心技术,它采用一种激光经双镜面全反射投影方式,利用运动光斑来模拟运动目标。本章主要介绍该运动目标模拟技术的理论,包括其物理基础、原理和基于原理推导的模拟目标运动航路影射算法三部分。物理基础部分是该运动目标模拟技术产生的物理条件,主要包括激光产生条件与特性、激光发生器概述和激光振镜概述等。在介绍物理基础的前提下,本章在第二小节重点就振镜式激光扫描运动目标模拟扫描技术的原理、方式和误差分析与校正进行了详细的论述。通过分析振镜式激光扫描运动目标模拟技术原理可推导出投影轨迹光斑的坐标方程,该坐标方程不仅反映了投影轨迹光斑与振镜偏转角的关系也间接反映了上位机航路轨迹坐标与振镜偏转角之间的控制关系,进而为推导目标匀速等半径运动等三种航路轨迹映射算法奠定了基础[1]。
模拟目标能够更好地再现运动目标的运动方式和运动状态,就必须对模拟目标的航路轨迹进行研究规划,这就涉及到航路映射算法的问题。现实中运动目标的航路轨迹是复杂多样的,常见的主要有匀速直线运动、匀加速直线运动、匀速圆弧运动、匀速直线运动基础上的随机加速度运动和转弯俯冲飞行等。在课题研究中重点对运动目标做匀速直线运动、匀速斜线运动和匀速等半径运动进行了模拟,以达到实现检测光电跟踪系统的目的。在模拟系统运行过程中,为了能更精确地控制模拟目标的运动轨迹,准确获取模拟目标的实时位置信息,就需要详细分析航路轨迹中运动目标速度、振镜偏转角度和振镜匀角速度三者之间的映射关系,此外还有振镜偏转角度与运动目标位置坐标之间的对应关系。
在推导模拟运动目标的三种航路轨迹映射算法之前,需要首先介绍一下PC上位机人机交互程序界面下的坐标系与投影平面幕的坐标系之间的变换关系。在这里,记xoy坐标系和XOY坐标系分别为投影屏幕下和PC上位机人机交互程序界面下的坐标系,如图1所示。
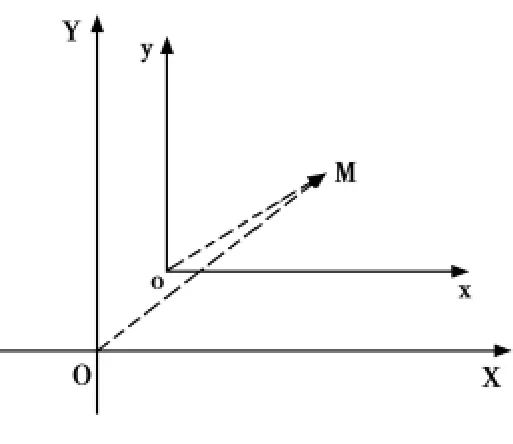
图1 坐标系转化示意图
设X,Y轴的坐标最大值分别为Xmax,Ymax,二者在xoy坐标系下对应的坐标分别为(xmax,0),(0,ymax),XOY坐标原点O在xoy坐标系下的对应坐标为o(xo,yo),则xoy坐标系下的任意一点M(x,y)转换为XOY坐标系下的对应点(X,Y)的转换关系如下:

1 系统总体设计
本文设计的振镜式激光扫描运动目标模拟系统主要由PC上位机,控制系统,执行机构和投影屏幕四部分构成。PC上位机选用工控计算机,上面运行有上位机软件,主要是用于参数输入与命令设置的人机交互程序和用于生成模拟目标航路轨迹的轨迹规划程序;控制系统作为连接PC上位机与执行机构的桥梁,是整个模拟系统设计的核心。控制系统主要接收PC上位机发送过来的控制指令、航路轨迹信号并对信号做相应的处理(命令执行、数据存储、数据提取分离、数模转换和CAN传送等);执行机构中的激光发生器用来输出一定功率,特定激光波长的激光束;激光振镜系统内含有两个正交设置的振镜单元X和Y,两个镜片分别负责X方向和Y方向的扫描。投影屏幕是用来显示模拟目标的铅锤平面幕。模拟系统总体设计结构如图2所示。

图2 振镜式激光扫描运动目标模拟系统总体设计机构图
系统上电运行,首先进行系统自检、初始化,初始化完毕后自动进入待机状态。设计人员可通过PC上位机软件的人机交互程序界面设定系统参数、设置轨迹属性、输入已知运动目标航路轨迹关键点坐标在人机交互程序界面的显示窗口生成运动目标航路轨迹曲线,同时每隔20 ms将采样得到的轨迹曲线坐标(x,y)和对应的光功率信息等数据通过USB发送给控制系统,控制系统将收到的信息存储到存储器中,待信息全部传输完毕后,控制中心的处理器提取存储器中的(x,y)坐标信息和光功率信息并进行数据分离,分离出的x,y值通过X,Y振镜控制电路进行D/A转换得到模拟电压控制信号,该电压控制信号传送给振镜驱动电路,分别驱动X振镜和Y振镜的偏转,同时分离出的光功率控制信息处理后传送给光功率控制电路,而后其控制激光器生成一束一定功率和特定波长的激光束,生成的入射激光经过振镜的偏转,在X、Y两个方向进行扫描合成,在投影屏幕上投射出模拟运动目标的光斑轨迹。控制中心每隔20 ms也会通过CAN总线将(x,y)坐标信息发送给光电跟踪系统的精度解算计算机解算跟踪精度。在上位机界面中也可以发送一些控制命令,包括激光发生器的开启与关闭命令等,控制系统接收到控制命令后,控制相关功能单元执行操作[2]。
2 系统软件设计
系统软件设计分PC上位机软件、下位机软件和USB通信程序三部分进行设计,PC上位机软件设计主要是用于参数输入与命令设置的人机交互程序和用于生成模拟目标航路轨迹的轨迹规划程序的设计;下位机软件设计包括主程序、初始化程序、存储程序、轨迹坐标转换程序、振镜控制程序、光功率控制程序和CAN通信程序的设计。USB通信程序完成上位机与下位机之间的通信。
2.1 人机交互程序设计
人机交互程序是振镜式激光扫描运动目标模拟系统上位机软件的重要组成部分,它提供了用户与上位机互动的窗口。用户可以通过上位机界面发出控制命令、设置航路轨迹生成参数或输入航路轨迹关键点坐标生成航路轨迹,也可设置文本和数据输出属性等。在WINDOWS平台下实现上位机编程常用Visual C++、Visual C#和LabVIEW等上位机开发程序,在本系统中开发上位机程序正是选用了支持面向对象的高级编程语言VC++的Microsoft VC++6.0开发环境[3]。上位机主界面如图3所示。

图3 上位机软件界面
2.2 USB通信程序设计
USB通信程序在系统软件中主要作为上位机软件与下位机软件的连接媒介,完成上位机向下位机的数据传输。
USB通信程序的设计主要有三部分:USB固件程序设计、USB驱动程序设计、USB上位机软件设计。下面简要介绍各部分开发流程和实现的功能。
(1)USB固件编程
在USB接口设计中,USB固件编程是整个设计任务的核心。USB固件程序用于完成USB设备的识别、重列举、设备请求、USB协议处理、外部硬件的功能、负责与USB主机之间的数据通信等。本软件系统中USB固件编程是在Windows平台下的嵌入式集成开发环境ARM ADS1.2中完成的。
(2)USB驱动程序设计
USB驱动程序是连接USB主机程序和USB固件程序的桥梁。USB主机通过相应的驱动程序来控制外部USB设备,进行数据传输等操作。在WINDOWS平台下,目前开发驱动程序有3种方式:使用 Microsoft的 DDK工具,使用KRFTech公司的WinDriver工具和使用Compuware公司的DriverStudio工具。使用Microsoft的DDK开发驱动程序,比较复杂,需要耗费大量的时间和精力。而WinDriver和DriverStudio是简化驱动程序开发的开发工具的出色代表,Win-Driver软件比较简单,可以快速创建驱动程序,但是对驱动程序的刻画不够细致。DriverStudio软件可以高效、细致地刻画驱动程序的每一个细节,因此得到了广泛的应用。在本软件系统中USB驱动程序设计的就是在WINDOWS平台下采用DriverStudio的DriverWork完成的。
(3)USB上位机程序
在USB设备开发中,上位机程序是设备与用户的接口。上位机程序通过USB接口设备驱动程序和外部的USB硬件进行通信,USB固件程序执行所用的操作。在编写上位机程序的时候,只需调用相应的Windows API函数向驱动程序提交各种申请,就能由驱动程序来完成相应的读、写数据等各种功能。主机端的应用程序负责向USB的FIFO缓存器发送大量数据,本系统在Visual C++6.0环境下进行开发。
3 结论与展望
振镜式激光扫描运动目标模拟系统是为检测地面机动防空武器的光电跟踪系统提供可跟踪模拟目标,且该模拟目标是二维平面内的一个具有真实目标红外特性和可见光特性的模拟运动目标。
[1]宁国勤.激光打标控制系统的研究与实现[D].硕士学位论文.武汉:华中师范大学,2002.
[2]戴咏欣.目标模拟运动系统设计和关键技术问题[D].西安电子科技大学研究生硕士学位论文,2005.
[3]于方德,苑伟.空中目标模拟系统设计[J].测控技术,2008,27(1):1 -2.