基于Canny检测算法实现的目标跟踪
2012-07-13王耀文于海勋
王耀文 , 于海勋 , 姚 博 , 沈 瑞
(1.西北工业大学 陕西 西安 710072;2.中国人民解放军96669部队 北京 102208)
实时目标跟踪是计算机视觉应用领域的一个新的研究方向[1-2],成为了近几年热门研究方向之一。它不仅仅可以用在安保领域,而且能够广泛的应用于其他领域,例如产品安全、辅助驾驶、交通控制等等,都有很大的市场潜力。
许多算法都可以应用在该系统中:模板匹配、光流法、Kalman滤波、粒子滤波。模板匹配滤波法采用一个固定的模板而且不能够有效的跟踪变形的目标;光流法对噪声很敏感,并且需要大量的计算;Kalman滤波器是一种线性最优的估计方法,但是只适用于符合高斯分布或线性分布的目标;粒子滤波能够用于不满足高斯或线性分布的目标,但是也有缺点,比如说粒子退化和计算复杂。
目标跟踪系统采用Canny边缘检测算法,它属于模板匹配算法中的一种,它满足目前为止应用于边缘检测的最严格的3个标准。相对简单的算法使得整个过程得到有效的执行并广泛应用。文中研究了一种自适应的Canny算法,与高斯滤波和LOG边缘检测方法相比,它能够更好的获得目标图像的边缘图。
1 目标跟踪系统的组成
图1是目标跟踪系统组成的方框图。
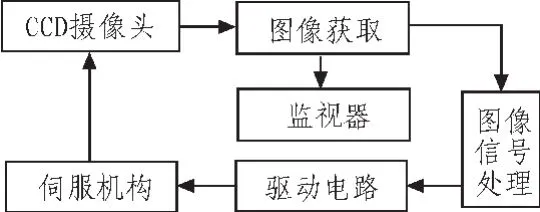
图1 目标跟踪系统组成方框图Fig.1 Structure diagram of the target tracking system
目标跟踪系统依靠图像传感器(常用CCD)获取目标图像。传感器扫描的目标生成视频信号,进行采样后生成数字信号,经视频信号处理器处理后,转移到错误信号处理器,测量目标的瞬时速度,并形成相应的误差信号,经过放大,然后输出到伺服机构对目标进行跟踪。
2 基于Canny算法的边缘检测
2.1 Canny边缘检测算法
Canny算法是一种阶梯最优型边缘检测算法[3-4]。Canny算法是由高斯函数的一阶导数构成的。由于高斯函数是关于圆对称的,所以Canny算子在边缘上是圆对称的,在垂直于边缘的方向上是反对称的。以下就是利用Canny算子进行边缘检测。
首先,利用高斯变换得到高斯平滑图像,计算微分得到梯度图;然后采用非最大值抑制算法找到可能的边缘点;最后根据双阈值找出图像的边缘点,得到单像素边缘图。
设二维高斯函数为:

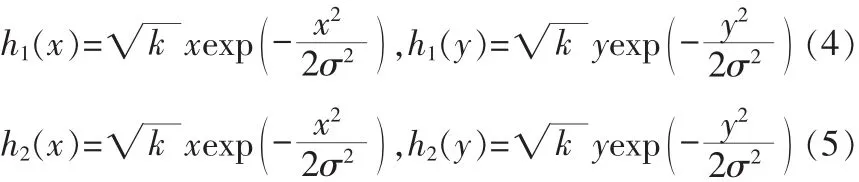
其中,σ是高斯分布函数参数,用来控制图像平滑。根据高斯函数的可分性,▽G可以分成2个一维滤波器。
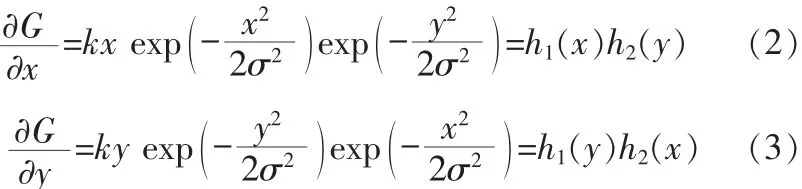
其中:
将高斯函数对x和y的偏导函数分别与图像f(i,j)卷积,得到输出:

令:
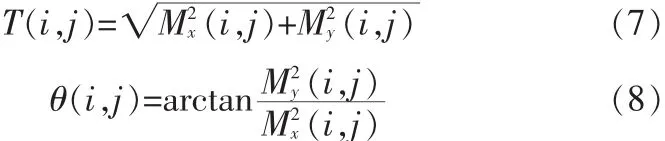
T(i,j)为图像在点(i,j)处的边缘强度,θ(i,j)为点(i,j)处的法向矢量。
Canny算法流程图如图2所示,其中高斯平滑滤波器主要为了消除噪声,利用上面的公式可以计算出梯度,利用非最大值抑制找到可能的边缘点。

图2 Canny算法流程图Fig.2 Flow chart of the algorithm
边缘点被定义为在梯度方向上局部强度最大的点。首先,找出所有可能的边缘点,然后根据当前点周围8个相邻点的梯度值判断当前点是否具有局部最大的梯度值。如果是,当前点就是边缘点。
2.2 算法参数
Canny边缘检测算法的结果主要由高斯平滑滤波器的宽度和跟踪过程中得两个阈值Th1、Th2决定[5-6]。增大σ值能降低检测过程中对噪声的敏感性,但是目标的细节会丢失,边缘会变得模糊。分析得出,高阈值Th2控制着梯度图中边缘检测起始点的性质。Th2的值越小,就能保留更多的边缘信息,边缘更精细,但是混合着的错误边缘就会增加。Th2的值越大,错误的边缘会被有效的抑制,但是同时,目标边缘信息会丢失。在找到高阈值Th2之后,可以计算处低阈值Th1。Th1控制着结束点得性质。减小Th1的值,保留更多的边缘信息,边缘会更连续;增大Th1的值,可视的边缘特征会减少,边缘出现断裂。这两个阈值可以通过下面的式子得到:

式中:AT为非极大抑制后图像中可能边缘点的全部点数;AP为可以设定的固定值,默认值为0.95。算法中得关键是AP的值,它决定了2个关键的参数:Th1和Th2。
为了使算法中的高阈值Th2有一个适应的过程,采用Ostu方法确定这个阈值。Otsu方法是基于类间方差最大化的分割算法,被证明是分割阈值自动选取的最优方法。
Otsu方法以目标物和背景的类间方差最大为阈值选取准则。设图像的平面坐标为(x,y),它的灰度为G={0,1,2,3…L-1},对于坐标点(x,y) 上对应像素点的灰度值表示为f(x,y),设t为分割阈值,B={0,1}表示二进制灰度值,用阈值t分割图像得到分割结果fi(x,y),它可以表示为:
灰度为i的概率为:

将像素按灰度分成两类:C0,C1,它们分别包含灰度等级在{0,1,2,3…t}和灰度等级在{t+1,t+2…L-1}内的像素。C0,C1分别对应图像的背景和目标物体。
背景像素的比例为:

记:

背景和目标物体的平均灰度级为:

则背景与目标物体的类间方差为:
三要建立保障机制。努力改进基层警务工作条件,尤其要解决农村辖区大、人口多、警力不足、装备落后、办案经费紧张等问题。建立保障机制可以在一定程度解决基层警务工作者工作中出现的差别对待问题。正所谓“高薪养廉”提高基层警务工作者的福利待遇可以提高其在面对诱惑时的抵抗力,同时和监督机制一起可以有效提高其违规工作的风险,以此防止基层警务工作者不作为和乱作为的问题。

最优阈值t*满足:

t*就是Canny算法中得阈值Th2。
3 目标跟踪
3.1 计算目标质心
图像经过Canny算法处理提取出目标的轮廓,得到二值边缘图。根据边缘图,计算目标的质心[6],质心计算公式如下:
其中,x、y分别是质心的横坐标和纵坐标。
3.2 运动轨迹的拟合和速度的提取
每一帧图像经过前面的处理和计算后,都可以得到目标的灰度质心,并可在坐标系中描绘出质心点,利用最小二乘法拟合出目标的运动轨迹,同时可根据时间间隔预测出目标质心的下一位置。由于目标在坐标系中的运动对应着x坐标和y坐标的变化,所以在对目标轨迹跟踪中,对x坐标和y坐标分别采用二次逼近公式预测下一位置的x坐标和y坐标。二次逼近公式为:

其中t为图像的拍摄时间间隔。经最小二乘运算后可得其系数为:
式中 f(ti) (i=1,2…N) 是原函数 f(t)在 N 个顺序时刻的测量值。|A|≠0,并且:
cjk(j,k=1,2,3) 是行列式|A|的余因子。
3.3 目标跟踪流程图
目标跟踪系统流程图如图3所示。
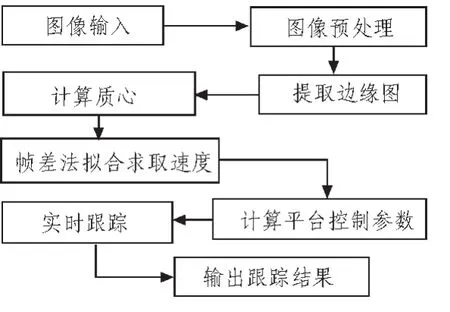
图3 目标跟踪系统流程图Fig.3 Flow chart of the target tracking system
4 测试结果和分析
对跟踪全过程进行视频录制,经过合理采样,可得到每一帧的图像。视频跟踪的窗口大小为19.00×14.00 cm,当系统平台对黑色圆球进行跟踪时圆球位于窗口中心,即(9.50,7.00)(假定坐标原点位于左下角)。当圆球运动时,从图像中可以测出圆球偏移中心的距离,计算其数学期望和方差可以判定该系统平台跟踪的好坏。
4.1 黑色圆球沿X轴运动
黑色圆球沿X轴自左向右运动1 m。t表示时间,单位s;x表示X轴方向距离原点的距离,单位cm;表示中心点(9.50,7.00)。 测试数据如表1所示。
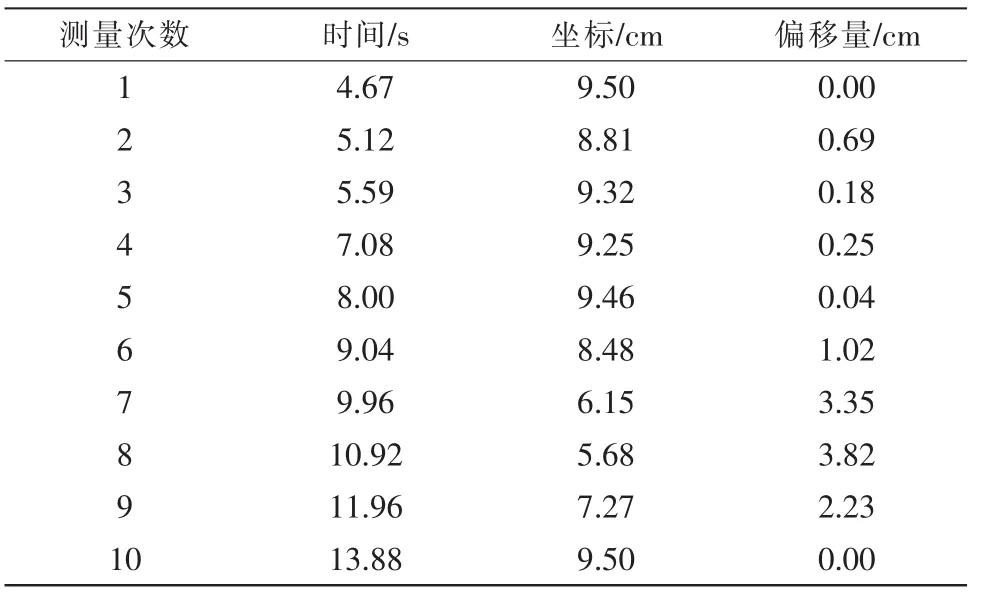
表1 X轴测试结果Tab.1 Test result of X axis
数据分析:
最大偏移量 xmax:
偏移量的数学期望 E(|x-x0|):
相对数学期望 ηx:

结论:该系统平台在X轴方向跟踪良好。
4.2 黑色圆球沿Y轴运动
黑色圆球沿Y轴自上向下运动1 m。t表示时间,单位s;y表示Y轴方向距离原点的距离,单位cm;表示中心点(9.50,7.00)。测试数据如表2所示。
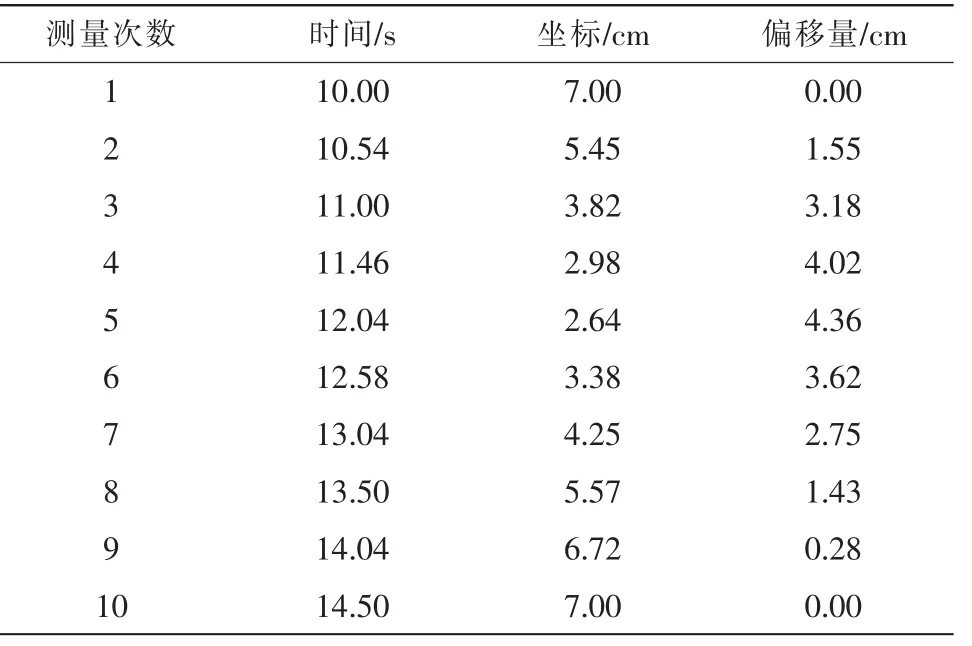
表2 Y轴测试结果Tab.2 Test result of Y axis
数据分析:
最大偏移量 ymax:
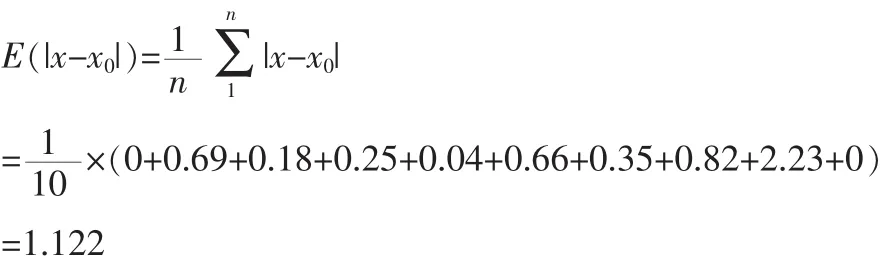
偏移量的数学期望 E(|y-y0|):
相对数学期望ηy:

结论:结论:该系统平台在Y轴方向跟踪良好。
5 结 论
黑色圆球沿XY轴两个方向运动,分析方法类似。由于转台本体由两套伺服电机控制PAN和TILT两个转动关节,所以沿X轴、Y轴的跟踪运动相互独立,互不影响。通过分析各个时刻的偏移量可以得出结论偏移量与运动的线速度成正比,即运动线速动越大偏移量越大,当偏移量在规定范围之内(X方向9.5 cm,Y方向7.0 cm)系统平台可以可靠稳定的跟踪目标;当偏移量大于允许的最大偏移量,系统平台会丢失跟踪目标。
[1]Ernesto A,Cassiano S,Daniel S.Video target tracking by using competitive neural networks[C]//WSEAS Transactions on Signal Processing,2008.
[2]LIU Yu-hui,YAN Qian-qian,LIU Wei,et al.An effective target tracking algorithm in infrared images video[C]//Wireless Communications Networking and Mobile Computing(WiCOM),2010 6th International Conference on,2010.
[3]PENG Xu,DE Zhong-yao.A study on medical image registration by mutual information with pyramid data structure[J].Computers in Biology and Medicine,2007(37):320-327.
[4]Shapiro L G,Stockman G C.计算机视觉[M].赵清杰,钱芳,蔡利栋,译.北京:机械工业出版社,2005.
[5]LIANG Guang-ming,SUN Ji-xiang.Otsu algorithm applies in canny algorithm[J].Journal of National University of Defense Technology,2003(5):36-38.
[6]Hill J,Park W T, Real time control of a robot with a mobile camera[C]//Proc.9th ISIR,Washington,D.C.1979.
