具有神经网络前馈控制器的污水处理模糊控制系统设计
2012-07-13王丽娟
王丽娟
(西安工业大学 陕西 西安 710032)
近年来,随着水资源的日益枯竭和水环境的日益恶化,人们开始越来越关注污水处理,污水处理过程的自动化控制成为一个焦点问题。污水处理厂是一个严重非线性,大时滞和干扰多的系统。近来许多基于人工智能技术的新的控制方法都被研究如何应用到污水处理控制系统中去[1-3,6-9]。模糊控制技术就是其中一种,非常适用于非线性系统,已经被成功应用到污水处理的控制中[9]。但在为干扰颇多的污水处理厂设计模糊控制系统时模糊控制是否能够有效地消除这些干扰对控制的影响是一个值得研究的问题,但上述这些文章中都 没 有 提 到[1-3,6-9]。
此外,对于大多数污水处理厂来说,溶解氧浓度是一个关键的控制参数。例如在文献[1]中,作者提出一个污水处理厂的绝大多数能耗都可以由溶解氧浓度来表示,在文献[2]中,溶解氧浓度是一个预测污水处理厂出水水质的软测量模型的输入参数,在文献[3]中,同过调解溶解氧浓度来避免污泥膨胀。因此本文比较了单独使用模糊控制和将模糊控制和前馈控制器相结合对污水处理厂的溶解氧浓度进行控制的结果,来判断模糊控制是否能有效去除污水处理控制过程中的干扰。此外,如何为污水处理厂设计前馈控制器在文中也进行了研究,提出了使用前馈神经网络来为污水处理厂建立前馈控制器的方法。
1 污水处理的数学模型
文中的研究对象是一个二级污水处理厂。该污水厂使用活性污泥工艺来处理污水。污水流经粗格栅和细格栅,然后进入曝气池,污水中的微生物和活性污泥在氧气作用下起反应,生成污泥沉淀下来。反应结束后污水在流经接触池,变为出水。生成的部分污泥回流到曝气池,继续反应,其余的被处理掉。
根据质量守恒定律,污水处理时的底物浓度,微生物浓度和溶解氧浓度满足以下关系[10]。

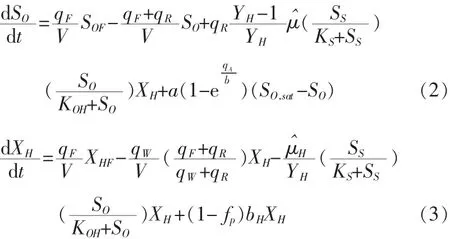
选择污水中的COD浓度以及DO浓度作为状态变量x1,x2,选择曝气量作为操作变量u,选择进水流量作为干扰q,再考虑到污水处理滞后性,可以得到如下所示的系统状态方程。

2 模糊控制系统设计
2.1 模糊控制器设计
模糊控制技术引进了专家和操作人员的经验,不依赖于系统的数学模型,对系统参数变化不敏感,被广泛应用于非线性系统的控制中。文中所设计模糊控制系统的结构如图1所示。
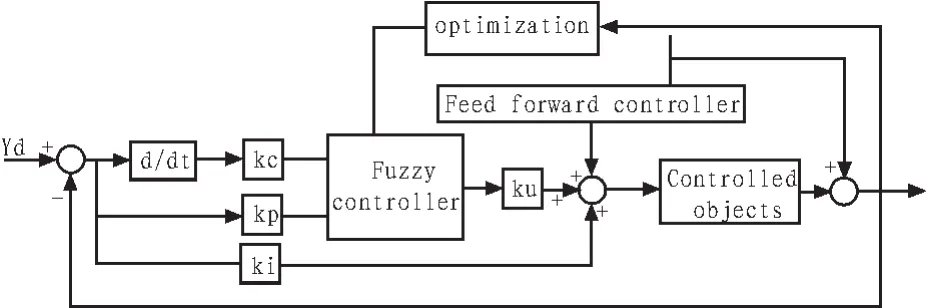
图1 系统控制结构Fig.1 Control structure of system
图中e,ec分别是DO的偏差及偏差的变化率。Ke,kc和ku是量化因子。为改善系统的稳态性能,为模糊控制器增加了一个积分环节。E,EC分别是e和ec对应的模糊语言变量的集合。U表示模糊控制器的输出量,是模糊输出语言变量的集合。根据经验,E,EC分成了7个模糊子集。对误差e,误差变化率ec及控制量u的论域做出规定,均为[-6,+6],语言值取 5 个, 分别为 “负大 NB”,“负小 NS”,“零 ZR”,“正小 PS”,“正大 PB”。 NB,NS,PB,PS取梯形隶属度函数,ZR 取三角形隶属度函数,在模糊规则的生成过程中引入一个算子α[11],输出 u 的模糊规则为 u=-[αE+(1-α)EC],α∈(0,1), 修正因子α取不同值便可得到不同的模糊规则。其中E表示误差e的论域,EC表示误差变化率ec的论域。修正因子α的取值则可以通过寻优函数实现,如图1所示。

同理Ke,kc和ku,ki等量化因子也可以进行优化[11]。优化结果如下:ke=1.5,kc=0.12,ku=0.6,ki=4,a=0.118 8。 对控制系统进行仿真,结果如图3中所示。可以看出此时系统稳态误差为16.7%
2.2 常规前馈控制器设计
进水量是污水处理厂的一个重要干扰,严重干扰系统控制效果。我们对污水处理系统进行线性化处理,为其设计一个常规前馈控制器如下所示。

将模糊控制器和前馈控制器结合起来对污水处理进行控制,仿真结果如图3所示。仿真结果表明系统稳态误差从16.7%几乎减小到0。
3 基于神经网络的前馈控制器设计
为一个控制系统建立前馈控制器,常见的方法需要获取该控制系统控制通道和干扰通道的精确数学模型,并且要求干扰量是可测量的。但事实上,由于污水处理系统的复杂性,通常很难获得其控制系统控制通道和干扰通道的数学模型,并且污水处理系统的干扰,比如进水量是不可测量的,所以难以使用常规的方法为其建立前馈控制器。文中使用了神经网络来设计污水处理厂的前馈控制器,因为它对非线性函数有良好的拟合能力。可将前馈控制器看作一个非线性函数,不失一般性,可以描述成如下公式[12]:y(k)=f(y(k-1),y(k-2)…,y(k-m),X,X(k-1),X(k-2),X(k-m)),表示前馈控制器的当前输出由前m个时刻的输出,当前的输入以及前n个时刻的输入决定。
文中通过神经网络来实现该前馈控制器,选择进水量这一干扰的当前及前两个时刻的 q(k),q(k-1),q(k-2)值及控制器的前一刻输出unn(k-1)作为神经网络的输入,决定当前时刻的输出unn(k)。如图1所示,当系统给定输入yd为0时,模糊控制器和积分控制环节输出一个控制信号ucom,我们选择其作为训练误差。最终建立一个三层神经网络,隐含层有5个神经元,输出层有一个神经元。我们使用48个样本对该神经网络进行训练,然后使用该网络取代图1中的常规前馈控制器,对系统进行仿真,结果如图2中虚线所示。结果表明使用神经网络前馈控制器取代图1中的常规前馈控制器后,系统的稳态误差约为10%,证明神经网络前馈控制器对干扰起到补偿的作用,虽然它的补偿效果比常规前馈控制器稍差,但是对于难以建立常规前馈控制器的污水处理系统来说,具有重要的实际意义。
4 结 论
文中为一个非线性、大时滞和多干扰的污水处理厂建立了模糊控制系统。并对该控制系统进行了仿真研究,仿真结果表明,模糊控制解决了污水处理系统的非线性和大时滞的问题,但对于污水处理过程中所受到的干扰没有显著的效果。文中对污水处理系统分别设计了一个常规的前馈控制器和基于bp神经网络的前馈控制器,将模糊控制器和前馈控制器结合在一起组成模糊控制系统,对其进行仿真,仿真结果表明:
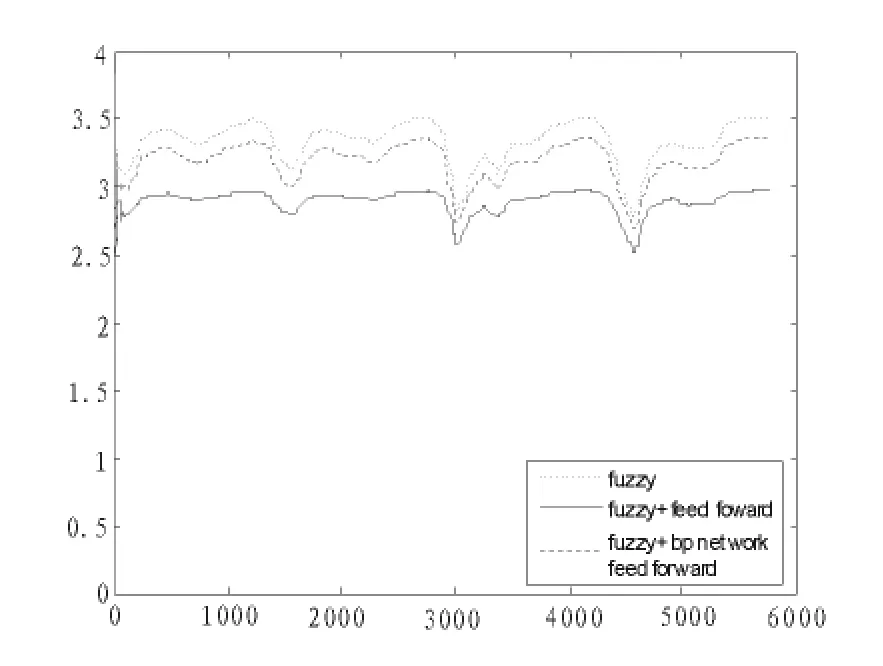
图2 控制系统仿真结果Fig.2 Simulation results of control systems
1)模糊控制器对控制系统中的干扰的影响去除效果不明显。
2)将模糊控制器和前馈控制器结合在一起可以克服干扰,减小系统稳态误差。
3)对于污水处理这样的复杂系统,可以使用神经网络技术为其建立前馈控制器,神经网络前馈控制器的性能虽然比常规的前馈控制器稍差,但对于难以建立常规前馈控制器的污水处理系统具有重要的实际意义。
[1]WANG Li-juan.Study on sewage treatment plant biologicalchemical energy consumption monitormodel based on BP Network[C]//Manila,Filipine:The 2010 internationalConference on Networking and information Technology,2010.
[2]GAO Mei-juan,TIAN Jing-wen,LI Kai.The study of soft sensor modeling method based on wavelet neural network for sewage treatment [C]//Beijing,China:IEEE International Conference on Wavelet Analysis and Pattern Recognition,2007:721-726.
[3]Bailey M,Kasabov N,Cohen T.Hybrid System for Prediction-A Case Study of Predicting Effluent Flow to a Sewage Plant[C]//IEEE,1995.Predicting chaotic flows to a sewage treatment plant based on neural networks,1995.
[4]Olsson G,Newell B.Treatment Systems:modelling, Diagnosis and Control[M].IWA publishing,1999.
[5]Steffens M,Lant P.Multivariable control of nutrient removing activated sludge systems[J].Water Research,1999,33(12):2864-2878.
[6]Yin M T,Stenstrom M K.Fuzzy logic process control of HPO-AS process[J].Journal of Environmental Engineering,1996,122(6):484-492.
[7]HU Yu-ling,CAO Jian-guo,QIAO Jun-fei.Fuzzy neural network control of activated sludge system[J].Journal of System Simulation,2005,10(17):2541-2544.
[8]Chen W C,CHANG Ni-bin,CHEN Jing-chun.Rough setbased hybrid fuzzy-neural controller design for industrial wastewater treatment[J].Water Research,2003(37):95-107.
[9]Tong R M,Beck M B,Lattern A.A fuzzy control of activated sludge wasterwater treatment process[J].Automation,1980,16(6):695-701.
[10]王丽娟.活性污泥水处理模糊控制系统设计[J].计算机工程与设计,2009,30(18):4263-4265.
WANG Li-juan.Design of activated sludge treatment fuzzy control system [J].Computer Engineering and Design,2009,30(18):4263-4265.
[11]王丽娟.基于调整函数的模糊控制器优化研究[J].计算机技术与发展,2011,21(5):44-47.
WANG Li-juan.Research on the fuzzy controller optimization based on adjusting function[J].Computer Technology and Development,2011,21(5):44-47.
[12]张卫东,胡大斌,陈国钧,等.前馈控制的神经网络实现[J].海军工程大学学报,2000,4(93):23-26.
ZHANG Wei-dong,HU Da-bin,CHEN Guo-jun,et al.Feed forward control on neural network[J].Journal of Naval University of Engineering,2000,4(93):23-26.
