带电清除配电线路异物的遥控仿生操作工具
2012-07-13章志钧傅正财
章志钧,孙 伟,傅正财
(上海交通大学 电子信息与电气工程学院,上海 200240)
配电线路带电作业是指在配电线路的各类设备上进行不停电检修和测试的一种特殊作业,可避免检修时线路停电。应用和推广遥控仿生操作工具,可以提高异物清除的带电作业化率。本文主要介绍遥控仿生操作工具的各部件规格与参数,工作原理和特性,以及投入现场应用的情况,就遥控仿生操作方式在配电线路中间电位法带电清除异物的应用实验进行论述。
1 配电线路带电清除异物的状况
1)作业量大且逐年提升 带电作业可以根据人体与带电体之间的关系,分为等电位作业、地电位作业和中间电位作业。为了最大限度保证作业人员的人身安全,配电线路带电作业优先考虑中间电位作业。
带电清除异物最常用的作业方法是中间电位作业法,即人体处于接地体和带电体之间的状态,使用绝缘工具间接接触带电设备来达到清除异物的方法。在利用绝缘高架车带电清除异物的过程中,工作人员处于中间电位下,关键是要对带电体保持一定的安全距离。
带电清除异物是供电公司日常带电作业工作的重要组成部分,嘉定供电公司带电作业组有关2005年,2008—2010年带电作业类别统计数,如表1所示。
由表1可见,近年来随着配电自动化率的提高,配电线路带电断接导线的工作逐年减少,而随着人民物质生活水平的提高,各类活动产生的异物造成配电线路障碍次数增多,带电清除线路异物的比重增幅比较显著。

表1 带电作业组作业类别统计
对2010年带电清除异物工作单进行细分,将最后通过停电作业清除的异物以及缺陷处理较为困难的异物按照形状、缠绕方式、位置、导电性分类,统计结果如表2所示。

表2 2010年带电作业组清除困难异物统计
由表2可见,现有操作方式难以清除的异物几乎都导电,重力支持与非重力附着方式参半,大部分位于导线和横担上。
2)作业方式不断创新和完善 最初清除异物是利用有效长度的绝缘操作棒接触异物,改变异物的重心位置,使异物受到重力影响,从指定的方向或轨道脱离配电线路设备。随着配电线路异物多样性的发展,带电清除异物的工器具与操作方法也在不断地完善和拓展,如绝缘操作棒端部机构的更新,利用辅助绝缘操作杆传递机械能等。
3)作业项目安全风险高且艰难 带电清除异物是带电作业中安全风险最高的项目,由于异物种类、缠绕方式、结构等受各种因素的影响,不能观察透彻,仅靠带电作业过程中“随机应变”的方式,往往会埋下安全隐患。以目前清除异物的方法进行作业,受现场环境因素和异物类别的制约,部分清除异物的作业难度大、耗时长,占用了较大的带电作业资源。例如:农村中被大风吹起的塑料薄膜、广场上断线的风筝、各类文化活动放飞的气球、喜庆节日燃放的鞭炮……与配电线路构件缠绕紧密。另外,随着地区生态环境的逐步改善,各类候鸟栖息繁殖,配电线路上的鸟巢也被列为带电清除异物作业的对象。
2 遥控仿生操作工具的研制
遥控仿生操作工具由机械端部、绝缘杆、遥控发射器和接收机组成。机械端部用来实施具体操作,绝缘杆用以维持人体与带电体有效绝缘,发射器与接收机实现操作命令的无线传输功能。
2.1 机械设计
在停电情况下,登杆作业清除异物最主要是通过“手”的操作,实施“拉、钩、抓”等动作,遇到仅靠手无法清除的异物,一般采用实施“割、剪”动作工具的配合,即可使异物脱离配电线路设备。遥控仿生操作工具的机械功能设计,满足“割、拉、钩、剪、抓”5个动作的功能,如图1所示。

图1 遥控仿生操作工具
遥控仿生操作工具端部与绝缘部位采用万向接头,用以调整端部操作工具与绝缘部位的角度,以满足现场作业环境多变的需要,如图2所示。
2.2 绝缘设计
遥控仿生操作工具的性能指标,要满足35kV及以下工器具的安全标准并通过电气试验。其端部机构的尺寸有严格的技术要求,对于延展性与机械强度要求较低的部位采用绝缘材料,在确保电压稳定的前提下,选择体积小巧的微型电机与电池,使配电线路带电清除异物操作过程满足国家GB/T 18857—2008标准。
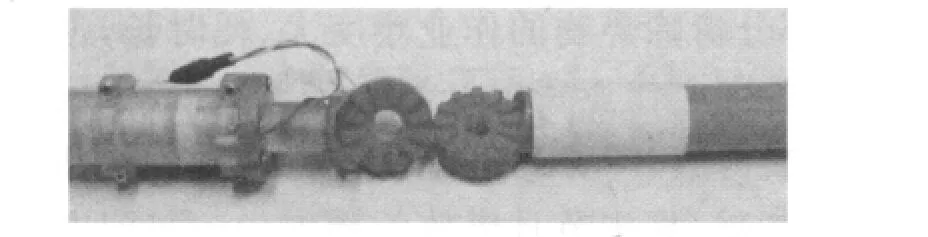
图2 遥控仿生操作工具端部万向接头
2.3 电气设计
为了保证遥控仿生操作工具接收器的正常工作,选用了12V的2 500mA/h锂电池,充电后能连续工作10h,当电池电压低于9.5V时,电源指示灯熄灭,此时必须给锂电池充电,以免电池损坏。
因为在夹钳夹紧和张开太大时,电机会因停转而引起很大的堵转电流(电机正常工作时的电流在70~100mA,堵转时大于700mA),为了防止电池大电流放电和电机过热被烧毁,特增加限流保护电路,在堵转时限流保护电路工作,把电流限制在350mA以下(实践证明,该电流太小会影响夹钳的夹紧力,太大会影响电机和电池寿命),并用蜂鸣器报警,告诉操作人员通过发射器关闭电机。遥控仿生操作工具主要电气技术规范,如表3所示。

表3 遥控仿生操作工具主要电气技术规范
为了清晰地指示夹钳的夹紧和放开两种工作状态,在接收器的下方装有两只LED灯,绿灯亮表示操作机构处于闭合状态,红灯亮表示操作机构处于分开状态。
2.4 遥控设计
遥控发射器和接收机采用超高频无线电波通信,具有较好的抗干扰性能。遥控发射器采用专用芯片编码,通过高频调制,形成无线电波发射给接收机。接收机将接收到的无线电波信号,放大解调后再经专用单片机解码,分别去控制不同的继电器,使直流电机正转或反转。电机输出的高转速,通过高变比的变速器,降为50~100r/min,并产生较大的力矩,通过丝杆推动机构的分合动作。
2.5 遥控仿生操作工具的试验
除了进行绝缘耐压试验之外,遥控仿生操作工具还进行了4项试验。
1)电动力矩试验 根据电机转速、调速装置以及端部机构设计,测试机械钳紧固力,机械剪剪切力,机械钩张力,确保操作机构能够顺利夹紧、切断和拖拉异物。
2)遥控试验 仿生操作工具可以在高架车等绝缘环境下进行操作,在杆上操作人员视线不佳的情况下也能由地面人员帮助遥控,遥控距离试验将确定地面遥控人员的位置范围。
3)电场干扰试验 不同于家用电器的遥控装置,仿生操作工具在操作过程中时刻受到高压设备电场的作用,电场干扰试验是将操作机构触碰带电设备的条件下进行开合操作,以确认其不受带电设备电场的影响。
4)操作可靠性试验 用以测试工具的电池寿命、端部机械构件的回程误差等。
3 带电清除异物
3.1 带电作业及实例
1)作业机理中间电位作业法是带电清除异物的主要作业方式,作业人员站在绝缘平台内,用绝缘工具进行操作。此时,人体与导线之间构成一个电容C1,人体与地(杆塔)之间构成另一个电容C2,绝缘工具的电阻为R1,绝缘平台的绝缘电阻为R2。作业人员通过两部分绝缘体分别与接地体和带电体隔开,这两部分绝缘体共同起着限制流经人体电流的作用,同时两段组合空气间隙防止带电体通过人体对接地体发生放电。中间电位作业的位置示意图及等效电路如图3所示。
2)清除异物功效 应用遥控仿生操作工具清除异物,由于采用远程遥控的方式取代了人为施力的方式,在操作过程中力的施加更加准确,减少了端部机构的抖动,保持了人体与带电体间的有效空气间隙,保证了作业工具的有效绝缘距离,使电容C1与电阻R1维持在一个较为稳定的数值,从而有效地降低了流经人体的泄漏电流,提高了带电作业的安全性。
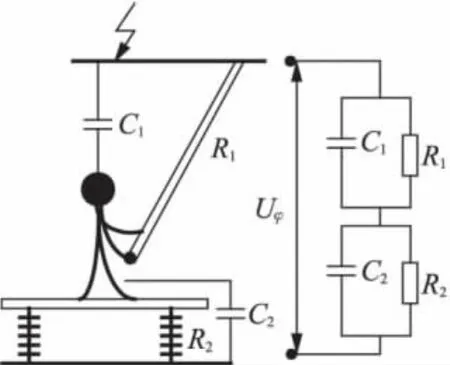
图3 中间电位作业的位置示意图及等效电路
3)应用实例 2012年1月至6月嘉定供电公司利用仿生遥控操作工具进行带电清除异物作业68次。清除线路异物、作业次数、处理时间汇总后如表4所示。

表4 2012年1至6月嘉定供电公司带电清除异物统计
在68次带电清除异物过程中,将遥控仿生操作工具端部机构放在合适的位置,利用功能控制即可方便地实现抓取、拽拉或剪断异物的操作,使带电作业过程更安全、更平稳、更迅速、更轻松,平均清除异物时间为5.4min,较以往的平均清除异物时间11.2min减少了51.79%,节约了大量人力、物力和车辆台班。利用拇指化的遥控操作取代传统的体力操作,对于鸟巢的清除更彻底,减少候鸟在配电线路同一设备处重复筑巢的概率,降低鸟害的风险。
4)注意事项 在清除异物时,只需将操作棒端部机构放在合适的位置,利用功能控制即可方便地实现抓取、拽拉或剪断异物工作,操作极其简便,平均带电清除异物的工作时间显著减少。仿生遥控操作棒现场作业如图4所示。

图4 仿生遥控操作棒现场作业
3.2 仿生遥控绝缘机械钳使用方法
1)使用前在发射器内装上12V遥控器专用电池。倘若按下发射器上的工作按键电源指示灯不亮,说明电池电压过低,应及时更换电池。
2)把配套专用的充电插头,插入接收机的充电孔内,将充电器接入市电,此时充电器上的LED灯显示红色,说明电池处于充电状态,当电池充满电后指示灯变绿色,一般在电池用完电的情况下需要经过2.5~3.5h才能充满。新电池最好让其完全用完,再把电池充足,这样可以保持电池能量和延长寿命。
3)向上拨动接收机上的电源开关,此时接收机下方的红色电源指示灯,和红色的“夹钳放开”指示灯亮,电机转动,夹钳做放开动作。按下发射器上的“D”键,红色的“夹钳放开”指示灯灭,电机和夹钳停止工作。此时把操作棒拿到高压线旁,再根据需要,按发射器上的“A”键,红色的“夹钳放开”指示灯亮,夹钳放开,当蜂鸣器响时,再按一下电机停止工作。或按发射器上的“B”键,绿色的“夹钳夹紧”指示灯亮,夹钳夹紧,当蜂鸣器响时,再按一下电机停止工作。
4)当接收机上的电源指示灯明显变暗或不亮时说明电池电压过低,应及时充电。
4 结语
遥控仿生操作工具于2011年6月开始研制,2011年10月完成制造和出厂试验,2011年11月完成模拟线路测试,2011年12月投入应用,至今应用效果显著,使原来体力操作难以完成的带电清除异物工作(操作过程中对安全距离严格要求的异物处理如黏附于35kV电缆头上的薄膜,悬吊在导线上的风筝等)现在都可轻松完成,减轻操作人员体力,提高工作效率,增加带电作业安全性。
在实践中发现,同时满足“割、拉、钩、剪、抓”及其他操作行为的组合式机械端部与控制方法的设计,将是下一步遥控仿生操作工具的发展方向,以实现“一键多能”的操作方法,不仅应用于带电清除异物,更可推广至带电断接导线,带电更换配电线路设备的作业类型中去。
