DSP在无刷直流电动机中的应用
2012-07-12成都理工大学核技术与自动化工程学院解洪亮
成都理工大学核技术与自动化工程学院 张 安 康 东 解洪亮
DSP在无刷直流电动机中的应用
成都理工大学核技术与自动化工程学院 张 安 康 东 解洪亮
本文根据无位置传感器无刷直流电动机的原理,采用TMS320F2812 DSP,实现了无刷直流电机的数字PID速度控制。仿真结果表明,本控制系统运行稳定,控制精度高,有着很强的应用推广价值。
无刷直流电机;无位置传感器;DSP
1.引言
从20世纪70年代以来,通用单片机开始在电动机控制系统中广泛应用。然而,受单片机本身结构的限制,系统组成元器件比较多、处理能力有限。一些厂家开发了电动机的专用芯片,许多工程师也设计了以单片机和专用芯片为核心的电动机控制系统,但它们仍然具有单片机系统固有的缺点。为了使电动机控制系统既可以适应一般的应用场合,又可以满足一些高精度、高性能的控制要求。TI公司推出了面向数据处理、运动控制等的一系列DSP芯片。其中,TMS320F2812 DSP芯片[1]上集成了多种先进的外设,具有灵活可靠的控制和通信模块,完全可以采用单芯片实现电机控制系统的控制和通信功能。本文设计和实现了以TMS320F2812 DSP为核心的无刷直流电动机[2]速度控制系统,整个系统结构紧凑,功能完善。
2.无刷直流电机的数学模型[3]
以采用绕组Y型连接,三相六状态120。两两导通方式的永磁无刷直流电动机为例,定子三相绕组的电压方程可表示为:

式中,aU,bU,cU为定子相绕组电压;ae,be,ce为定子相绕组电动势;ai,bi,ci为定子相绕组电流;L为定子每相绕组自感; 为A相和B相绕组的互感(其它类推);R为三相定子电阻;P为微分算子。
由式(1)可以得到永磁无刷直流电动机的等效电路模型,如图1所示。
定子绕组产生的电磁转矩表达式为:
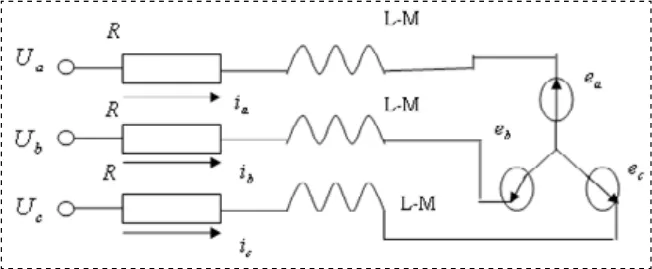
图1 无刷直流电机等效电路模型

运动方程:

式中:eT为电磁转矩;LT为负载转矩;B为阻尼系数;ω为电机机械转速;J为转动惯量。
3.基本设计方案
从理论上来看,直流无刷电动机的速度和转矩控制主要依据如下的转矩和反电动势工程计算方程
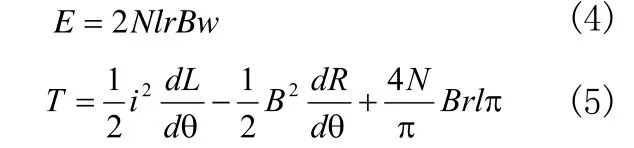
其中,N为直流无刷电动机定子每相线圈数,l为转子的长度,r为转子的内径,B为转子的磁通密度,ω为电动机的角速度,i为相电流,θ为转子的位置,R为相阻抗,L为相感抗。
从上述方程可以看到,反电动势与电动机的转速成比例,而转矩与相电流也几乎是成比例的。根据这些特点,在本系统采用如图2所示的控制策略。
可以看到这是一个典型的双闭环直流调速系统,包括一个速度调节环和一个电流调节环。首先,根据所检测到的电动机转子位置信号,计算得到电动机的当前转动速度;然后与速度参考值比较,得到速度误差信号,经过一个PI控制器调节以后,得到相应的电流参考信号(Iref)。该电流参考信号与实际的电动机相电流信号进行比较,误差值经PID控制器调节后,将适当的PWM信号施加到电动机的功率电子主回路上,通过控制功率晶体管的开通关断顺序和时间,可改变电动机定子绕组中的电流大小和绕组的导通顺序,从而实现对直流无刷电动机转速和输出转矩的控制。
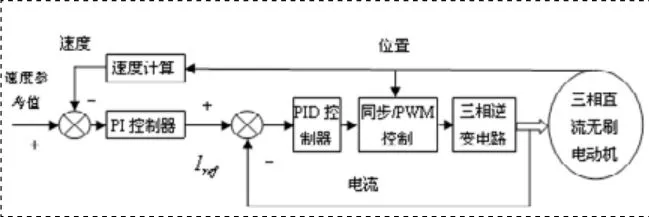
图2 直流无刷电动机的速度和电流控制
4.系统整体结构
要设计一个完整的DSP控制器的直流无刷电动机速度控制系统,首先要了解电动机的特性,其次应明确设计指标和设计任务。在此基础上,至少要完成以下几部分的设计:
a.电动机转子位置的检测。b.电动机相电流的检测。c.参考速度输入。d.速度的测量e.速度误差和电流误差的调节f.PWM信号的产生g.DSP控制器与外部元器件的连接。h.功率转换器的设计。
图3给出了系统的整体结构图,从图中可以看到,DSP控制器输出的6个PWM信号用来驱动三相功率变换电路。功率开关换向时刻的确定可通过检测三相直流无刷电动机反电动势波形的过零点来实现。利用简单的分压电路,通过检测电动机的三相电压,就可以实现反电动势过零点的检测。由于在任何时刻,电流仅流过三相中的两相,在反电动势过零区域中,没有转矩产生。因此,系统只需要检测一个相电流。
5.电流、电压检测
5.1 电流检测
在该系统设计中,使用了一个旁路电阻来检测各相的电流。该电阻位于三相全控功率变换电路的下端功率桥臂与地之间;电阻值的选取根据用户需要而定,一般应该使它可以起到一个功率变换电路的过电流保护作用。电阻上的压降信号经过放大以后,送到TMS320f240片上的某一路A/D转换通道,经过A/D转换以后,得到合适的电流信号。在A/D转换结束的时候,A/D转换模块向CPU发出一个中断请求信号,等待CPU对该电流信号的处理。每隔50sμ,DSP控制器对相应电流进行采样,从而实现了频率为20kHZ的电流调节环。根据电流误差,PID控制器在每个PWM周期开始时对PWM脉冲的占空比进行调节。
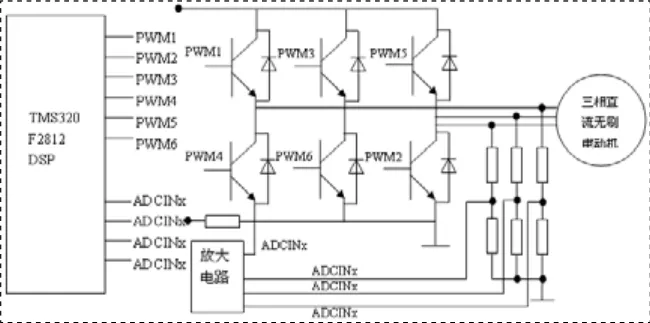
图3 系统总体结构图

5.2 电压检测
(1)用于无位置传感器方案的专用硬件
该系统采用了直接测量电动机反电动势的方法。图4给出了专门用于无位置传感器算法的硬件原理电路。可以看到,该电路使用由电阻、电容等构成的简单电路来代替原来的电动机轴位置传感器,从而降低了系统的成本。
(2)无传感器算法
由理论分析可知,在没有位置传感器的情况下,通过检测电动机各相绕组的反电动势[4]过零点,就可以间接确定转子的实际位置。因此,无位置传感器算法的关键在于得到与各相绕组对应的反电动势过零点。图5给出了电动机的一个相模型,假设为A相绕组。
这里R是相阻抗;L是相感抗; Ex为反电动势; Vn是Y连接点对地电压;Vx是对地相电压; Ix是相电流。相电压Vx的测量可通过F2812 DSP控制器的模拟转换单元及图4所示的分压电路实现。这样,直流无刷电动机的定子相电压方程可写为如下形式:

三相绕组中有两相的电流大小相等而方向相反,另外一相上的电流为零。在电动机的某个运行时刻,假设相绕组C未被馈电(即其中没有电流通过),由上述方程和前面的分析可以得到如下的相电压方程组:

图6给出了三相直流无刷电动机的瞬时反电动势波形。从图中可以很明显的看到,在反电动势的过零点,3个反电动势的总和为零。因此,上述方程可以写为:

对于未反馈电的定子绕组C而言,如果知道了互感点电压(nV)和电动机的瞬时相电压(xV),其反电动势可按照如下方程来计算:

6.PID调节
本系统采用数字PID控制器作为直流无刷电动机速度控制系统所需要的控制器。
事实上,这里的PID调节模块是一个PI控制器,其一般形式为

这里, Ts为采样周期;
7.软件设计
根据系统的控制策略,可以得出整个控制系统软件由主程序和INT3中断服务子程序组成。流程图如图7所示。
软件采用模块化设计。在主程序中,初始化各个软件模块,然后初始化通用定时器T2,利用定时器T2来产生所需的采样周期,在通用定时器T2的周期中断处理子程序中,对电动机的相电流等信号进行采样,使能T2的周期中断和相应的系统中断。另外,初始化其他的系统参数。接下来,整个程序进入循环等待状态,等待中断请求信号的出现。在相应的中断服务程序中,完成系统的控制、驱动操作。
8.控制系统仿真及分析
双闭环调速系统电动机启动过程中的超调量为4.3%,转速的超调量为8.3%。通过MATLAB[5]仿真,从运行结果可以看出,该系统具有无穷大的幅值裕度,系统闭环响应比较理想,满足设计要求。
[1]苏奎峰,吕强,耿庆锋,等.TMS320F2812原理与开发[M].北京:电子工业出版社,2005.
[2]韩安太,刘峙飞,黄海.DSP控制器原理及其在运动控制系统中的应用[M].北京:清华大学出版社,2003.
[3]康怀祺,史彩成,赵保军,等.一种基于扩展数学形态学的边缘检测方法[J].光学技术,2006,32(4):634-635.
[4]Jianwen Shao.An ImprovedMicrocontroller-Based Sensorless Brushless DC(BLDC)Motor Drivefor Automotive Applications.IEEE Transactions on IndustryApplications.2006.Volume:42.Pages:1216-1221.
[5]王海英,袁丽英,吴勃.控制系统的MATLAB仿真与设计[M].高等教育出版社,2009:177-199.
张安(1986—),男,河南商丘人,成都理工大学2010级硕士研究生,研究方向:测试计量技术及仪器。
