智能步进电机控制器设计
2012-07-12南阳防爆集团股份有限公司刘平顺
南阳防爆集团股份有限公司 刘平顺
中国矿业大学信息与电气工程学院 乔凤杰
智能步进电机控制器设计
南阳防爆集团股份有限公司 刘平顺
中国矿业大学信息与电气工程学院 乔凤杰
本设计是根据现实生活中常用的步进电机和常用功能设计的驱动器,设计的主要目的是解决步进电机驱动器功能单一和生产成本的问题。设计中采用AT89S52单片机芯片作为核心控制模块,驱动芯片采用带细分功能的TB6560AHQ芯片,最多可达16细分,且自带正弦波电流驱动,存储芯片采用24C04。最终系统可以实现多模式选择,圈数、速度设定和存储,低速自动细分,各种数据的液晶显示,过热和掉电保护等功能。
步进电机;细分驱动;多模式;数据存储
1.引言
步进电机驱动器是步进电机控制系统的核心,步进电机能否更好的应用,很大程度上取决于步进电机驱动器的水平。伴随着步进电机的产生,步进电机驱动器就一直在不断发展和进步,目前国内外步进电机驱动器种类很多,但是大部分功能比较单一,很多是针对固定的步进电机或者固定的应用领域,而且价格一般较高,很多不带细分功能,很难满足现实生活中需要灵活应用且成本较低的场合。
本设计的目的就是解决现实生活中需要灵活应用和低成本的问题,并且是使用应用最广泛的混合式步进电机而制作的步进电机控制器,步进电机采用三洋公司的2-4相两用混和式步进电机。系统可以实现正反转控制,多模式选择,圈数、速度设定和存储,速度调节范围宽,低速自动细分,输出转矩大且可调,各种数据的液晶显示,过热和掉电保护等功能。
2.设计分析与方案的确定
2.1 设计方案
方案1:细分完全靠软件实现,驱动电路采用三极管和A/D转换芯片;脉冲用单片机的定时器产生;显示采用数码管;存储采用单片机内部的特殊存储单元。这种方法侧重于软件设计,当脉冲太快时,定时器中断就会和细分程序产生冲突,造成程序的混乱;存储的数据容易丢失;显示内容比较单一;控制的实时性不易保证,调试也比较烦琐,可靠性较低;而且效率较低,大部分能量消耗在三极管得发热上。
方案2:驱动电路采用东芝公司最新推出的步进电机驱动芯片TB6560AHQ,它内部集成双全桥MOSFET驱动;最高耐压40V,单相输出最大电流3.5A(峰值);具有整步、1/2、1/8、1/16细分方式;内置温度保护芯片,温度大于150℃时自动断开所有输出;具有过流保护;配合单片机可以实现自动细分、电流和力矩自动控制、过流和温度过高自动保护等功能。掉电存储电路采用Atmel公司的AT24C04(EEPROM);显示电路采用1602液晶显示模块;输入设备采用4*4矩阵键盘。
2.2 方案对比及确定
用分立元件做的驱动电路比较复杂,调试繁琐,如果设计的电路稍有瑕疵,就会造成故障率急剧上升,效率较低,很大一部分能量浪费在驱动电路上,而且很难实现细分和正弦波电流驱动。集成芯片驱动方式具有外围电路简单,调试容易,稳定性高,效率高,体积小,功能齐全等优点,能做到自动细分和正弦波电流驱动,但是功率一般不能做的很大。
当速度增大时单片机定时器中断较快,因此细分不能全部用软件实现,若使用三极管和A/D转换芯片时必须大量依靠软件实现细分;圈数和速度必须牢靠的存储起来,方便应用,因此必须使用专业的掉电存储芯片;使用中必须实时显示速度和圈数,因此应该选用能显示多个数据的1602液晶显示模块;使用中对稳定性和实用性有很高的要求,使用集成芯片外围电路简单、功能强大,可以把单片机大量的资源用在其他地方,不仅增加了系统的整体稳定性和实用性,而且还能增加许多其他功能,使系统的实用性更强。

表1 力矩控制选择模式

表2 电流衰减控制

图1 总体设计框图
所以综合以上情况考虑,选用方案2来设计步进电机智能控制器。总体设计框图如图1。
3.主要模块设计
3.1 驱动模块
3.1.1 TB6560AHQ简介
TB6560AHQ是东芝公司最新推出的步进电机驱动芯片,通过采用BICD工艺将低电阻与高许可损耗封装相结合,使其与其它同类产品相比能够极大减少热量的产生,还能支持使用时钟输入控制的无微控制器应用环境下的微步驱动。自动产生纯正的正弦波控制电流,与其它高集成度步进电机控制芯片相比,在相同高转速下力矩不但不会下降,反而有所增加;支持各种步进电机选型。
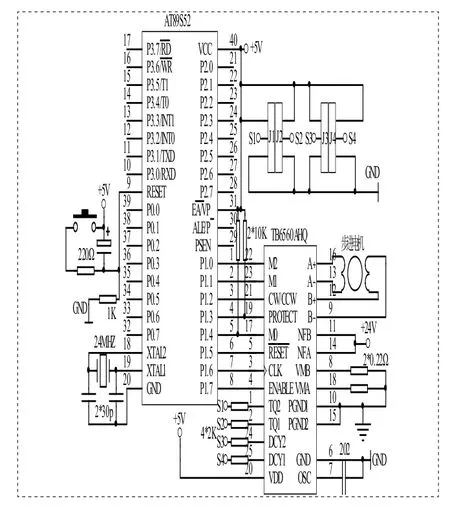
图2 TB6560AHQ驱动电路

图3 细分函数流程图
TB6560AHQ的主要特点有:
●内部集成双全桥MOSFET驱动;
●最高耐压40V,单相输出最大电流3.5A(峰值);
●具有整步、1/2、1/8、1/16细分方式;
●内置温度保护芯片,温度大于150℃时自动断开所有输出;
●具有过流保护。
3.1.2 硬件电路的设计及驱动原理
驱动芯片硬件电路如图2。

图4 掉电存储电路

图5 液晶显示电路
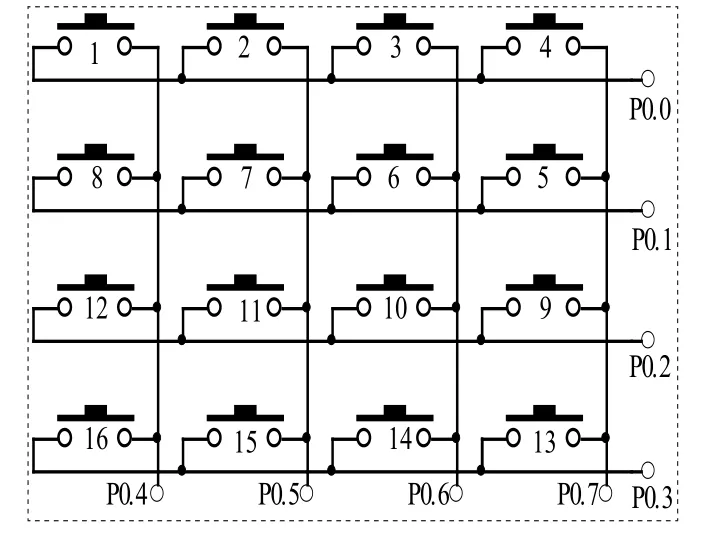
图6 矩阵键盘
工作原理如下:M1(22)和M2(23)引脚通过单片机的程序控制细分,共有2、8、16三种细分模式,CW/CCW(21)引脚控制电机的正反转,当需要正转时单片机P1.2输出高电平,需要反转时输出低电平;PROTECT(19)引脚是芯片的保护输出端,当芯片正常工作时由于上拉电阻的作用,单片机P1.3口采集到高电平,当芯片过热保护时,把单片机P1.3口拉低,此时可令程序断开所有输出,从而保护芯片;MO(17)引脚是芯片初始化引脚,芯片初始化结束后会输出低电平,通过这个引脚单片机可以查询芯片初始化是否结束。
TQ2(1)和TQ1(2)控制驱动芯片的输出电流,通过这两个端的选择可以选择不同的工作电流,具体选择模式如表1。可以通过J1和J2跳线选择最大电流的100%、75%、50%和25%。改变电机的驱动电流也就改变了电机力矩的大小。
DCY2(24)和DCY1(25)是电流衰减模式控制端,通过这两个端的选择可以选择不同的衰减模式,具体模式如表2。可以通过J3和J4跳线选择0、25%、50%和100%四种衰减模式。

图7 主程序流程图

图8 加速曲线流程图
由于电机本身状况、供电电源状况及脉冲频率等其他因素的影响,步进电机可能会产生高频噪声,通过选择不同的电流衰减模式可以很好的降低甚至消除这种噪声。
OSC(7)引脚是斩波频率控制端,所接电容的大小可以控制斩波频率的大小。当所驱动的步进电机固定后,电容值也随之确定。
当单片机上电后,在初始化程序中对芯片进行复位(把RESET(5)拉低,然后再置高电平),当检测到M0(17)出现低电平时,表示芯片已经初始化。然后根据按键输入或者24C04存储的信息输出脉冲,芯片在脉冲的作用下产生正弦波驱动电流,驱动步进电机运转。在芯片运行期间,保持ENABLE(4)引脚为高电平;当按下停止键或者PROTECT(19)引脚出现低电平时,保持ENABLE(4)引脚为低电平,断开所有输出。
3.1.3 软件程序流程
驱动芯片的控制程序采用C语言进行程序设计,便于主程序的调用,程序流程如下:
⑴初始化TB6560AHQ;
⑵根据速度的大小定义芯片细分管脚;
⑶发送脉冲和正反转信号;
⑷监控芯片保护端,当温度过高时自动断开所有输出。
驱动芯片的细分程序流程图如图3所示。
驱动芯片TB6560AHQ自带2、8、16三种细分模式,单片机通过M1(22)和M2(23)两个引脚可以实现对细分的控制。在程序设计中定义了一个细分标志位t2,当执行完上述程序后t2会自动的被覆上细分值,在圈数程序处理单元,把t2自动的乘上,因此就能实现在细分情况下,速度和圈数的准确对应。
3.2 掉电存储模块
3.2.1 硬件电路设计
掉电存储模块采用ATMEL公司生产的AT24C04芯片,它的容量是512字节×8位,既4k位,对于本系统来说已经足够了。电路的连接如图4所示。
电路中的SDA接单片机的P3.0口,SCL接单片机的P3.1口,由单片机模拟I2C的工作与存储芯片进行通信;上拉电阻如4图所示,选用5.1k的普通电阻。
3.2.2 软件程序设计
3.3 显示模块
3.3.1 硬件电路的选择与设计
显示电路使用RT1602C显示模块,其接线图如图5。
3.3.2 显示设置
本设计中,0—04h显示"MODE";06h—0Bh显示"SPEED:";0Ch—0Eh显示三位速度值;然后第二行和第一行对应显示模式、圈数。
设计中采用P2口作为数据口;采用P3.5、P3.6、P3.7三个接口作为控制接口,通过设置电平高低控制1602的工作状态。
3.4 单片机最小系统模块
3.4.1 硬件电路中晶振选择
单片机的外围电路选择:因为步进电机运行时的速度靠定时器的定时中断产生,因此中断频率要求高一些,所以晶振选用24MHZ。电容选用30PF的瓷片电容。
3.4.2 定时器初值计算
根据所用步进电机(三洋公司的2-4相两用混和式步进电机)的资料进行分析和现场试验得出:当用四相四拍方式运行时,每个脉冲周期走过1.8°,也就是200个脉冲周期走一圈;当用两相两拍(本设计所选驱动芯片驱动方式)时,每个脉冲周期走过0.9°,也就是400个脉冲周期走一圈。当使用细分驱动时,脉冲数还要乘上细分数。
因此可以得出公式如下:

式中:S—速度,单位:圈数/分;M—定时器每分钟产生的脉冲数;N—细分数,有2、8、16三种。
脉冲的周期:

式中:P—脉冲的周期,单位:毫秒;定时器定时时间:T=P/2。
根据公式(1)和公式(2)可以得出:

根据定时器计算公式:

式中:T0—定时器初值;振荡周期—1/24MHZ。
根据公式(3)和公式(4)可以得出:

当S=100转/分,T=2.5ms;当S=200转/分,T=1.5ms。
根据定时器计算软件,根据T可以得出对应的定时器T0初值。因此把T0初值和S带入公式(4),并经过修正,可以得出:

这样就可以根据速度自动求出定时器初值:

3.4.3 圈数计算
由3.4.2的介绍可以得出每400个脉冲周期走一圈。当使用细分驱动时,脉冲数还要乘上细分数。可以在程序中设置一个标志位,标志位初值为0,每产生一个定时器中断,标志位就自动加1,当标志位的值和400*N(N:细分数)的值相等时,就表示走过了一圈,此时圈数自动减1或者加1,标志位自动清零。
3.5 按键模块
使用4*4矩阵键盘作为输入设备,[4]硬件电路如图6,可以很方便的输入各种数据和执行各种操作,方便用户使用。
其中数字键10个,用来输入圈数和速度值、模式选择键1个,用来选择模式(共有2种模式:模式1和模式2。模式1能进行存储;模式2不能存储)、正转键1个,按下后电机正转、反转键1个,按下后电机反转、停止键1个,按下电机停止转动、确定键1个,用来把输入的圈数和速度值写进程序的相应位置、调整键1个,按下后进行速度和圈数的设定。
由于按键较多且各自都具有自己独立的功能,在联合调试时经常出现按键混乱的现象,因此解决的办法是在程序中增加按键判断标志位,当进行设置速度、圈数时用对应标志位屏蔽正、反转按键,当电机运行时用标志位屏蔽设置按键的操作。
4.主程序设计
主程序模块中包含了系统初始化、速度和圈数采集、定时器初值计算、按键的判断、驱动芯片控制、以及各个模块的调用等。其中定时器用的是单片机16位的定时器3。主程序流程图如图7所示。
5.联合调试
5.1 细分的实现
步进电机细分技术是步进电机控制器的重要性能指标,细分可以有效降低步进电机运行时的震动和噪音,特别是低速状态下。
但是,当电机需要高速运转时,过多的细分会限制速度的提高,而且,在电机高速运转的时候细分的效果已经不太明显,因此,什么状态下细分、细分数的多少是细分驱动技术的关键点。本设计通过软、硬件联合实现细分驱设置细分数。因此可以达到很好的驱动效果。以八细分为例,通过细分可以很明显观察到细分后电流变化的效果,本来每个脉冲对应的是一个方波的输出,现在经过8细分后每个脉冲只能达到原来的1/8,这样电机的步进角就变为原来的1/8,而且根据速度的大小程序会自动的精度就提高为原来的8倍。这样就很好的解决了电机在低速时的震动和精度问题。本设计采用软硬件联合实现细分实现容易、可靠性高,具有很好的应用价值。
5.2 正弦波驱动电流的实现
传统的控制器由于种种原因大部分采用方波驱动,方波驱动实现容易。但是噪音和振动很大,而且不可能使转速做的很高,输出力矩也较小。正弦波驱动可以显著提高步进电机的运行性能,可以增加电机的转矩,可以提高空载转速,可以降低电机运行时的震动和噪音,因此是新型控制器的首选方案。
5.3 加速曲线的设计
步进电机在启动的时候很重要的一个性能指标就是空载启动频率,在现实应用中,特别是需要高速运动的场合,直接启动频率更是决定了步进电机控制器的应用领域。提高电机启动频率的方法基本上有两种:使用更好电流驱动波形和做一个加速曲线。本设计所用的电机在使用方波电流驱动和没有加速曲线的情况下直接启动的速度最高为200转/分。本设计采用TB6560AQH驱动芯片,它内部自带正弦波电流驱动波形,能很好的提高步进电机的启动频率,但是经过多次的实验得出也只能提高到300转/分左右,还是差强人意。
最终使用阶跃式加速,速度一阶一阶递进式加速,这种方法易于实现,占用单片机资源较少,但是用这种方法时如果阶跃得速度过大,电机会出现震动和噪声。
但是为了不使电机出现震动和噪音,本设计在单片机资源允许的前提下使速度阶跃尽可能的小。具体的做法是:单片机上电工作后首先对速度进行比较,以200转/分为基准,如果速度小于200转/分则完全可以直接启动,不需要加速曲线;当速度高于200转/分时,首先把速度差求出来,让定时器首先以200转/分的速度产生脉冲,在定时器中断函数中根据速度差把速速逐渐提高,直到速度差为零。具体的流程图如图8。
5.4 本设计达到的主要性能指标
⑴运行速度精度:可以使速度精度达到96%以上(速度精度=实际速度/设定速度*100%)。
⑵最大空载起动频率:可达到的最大空载启动频率为1.5KHZ。
⑶最大空载的运行频率:最大空载运行频率3KHZ。
⑷运行矩频特性:本设计由于没有专业的转矩测试仪器,因此无法给出准确的转矩数值,转矩变化时的频率为800HZ。
6.结论
步进电机是一种通过电脉冲信号控制相绕组电流实现定角转动的机电元件,与其他类型电机相比具有易于开环精确控制、无积累误差等优点,在众多领域中获得了广泛的应用。国内研究步进电机驱动器的科研单位和公司很多,但是功能大多单一化,很多都是只能驱动固定用途的步进电机,且多不带细分,价格较贵。很难满足社会生活中需要灵活运用、低成本且功能要求较全的场合。
本设计是根据现实生活中常用的步进电机和常用功能设计的驱动器,设计的主要目的是解决步进电机驱动器功能单一和生产成本的问题。
[1]杜坤梅等.电机控制技术[M].哈尔滨:哈尔滨工业大学出版社,2002年2月
[2]徐大诚等.微型计算机控制技术及应用[M].北京:高等教育出版社,2003年5月
[3]沙占友等.单片机外围电路设计[M].北京:电子工业出版社,2006年6月
[4]余永全等.单片机应用系统的功率接口技术[M].北京:北京航空航天大学出版社,2004年9月
[5]葛宝明等.先进控制理论及其应用[M].北京:机械工业出版社,2007年6月
乔凤杰(1986—),男,河南安阳人,现就读与中国矿业大学信息与电气工程学院。