PLC在闭环控制系统中计算偏差信号的方法
2012-07-11韩亮
韩 亮
(山西机电职业技术学院电子电气工程系,山西 长治 046011)
PLC在闭环控制系统中计算偏差信号的方法
韩 亮
(山西机电职业技术学院电子电气工程系,山西 长治 046011)
闭环控制系统中,控制器将给定信号与反馈信号进行比较后得到偏差信号,再将偏差按照一定的控制规律进行运算,实现对过程参数的自动控制。针对模拟式控制器,需要硬件电路转换属于不同量纲的给定与反馈才能计算偏差的特点,提出一种不需要转换电路,通过PLC的软件设计,直接计算偏差信号的方案。重点考虑PLC对模拟量信号的滑动平均值滤波与缩放处理。实践证明,该方案不仅节省硬件资源,而且增强了抗干扰能力,可广泛应用于工业闭环控制系统中。
PLC;模拟量信号;滑动平均值滤波;缩放
0 引言
由于扰动的影响,使闭环控制系统中的被控参数偏离了给定值,产生了偏差信号。控制器将偏差按照一定的数学关系转换为控制量,并作用于被控对象,以校正扰动对控制系统造成的影响。
偏差信号由给定信号与反馈信号进行比较后得到。在工业现场,由变送器检测被控参数,并将其转换成电信号作为反馈信号。给定信号分为内给定和外给定。内给定由模拟式控制器内部的内给定电路直接给定,而外给定是由外部的变送器,或是电位器来给定。[1]
模拟式控制器由输入电路计算偏差。[2]控制器的输入电路接收给定与反馈,当二者是同一量纲时直接相减获得偏差;如果不是同一量纲(电压、电流),需要电压/电流转换器将其转换为同一量纲,再计算偏差。使用数字式控制器,可以通过软件设计对采集到的不同量纲的模拟量信号进行缩放处理,直接计算偏差,这种方法不需要硬件转换电路,节省了硬件资源,而且能耗低。
本文给出一种以PLC为数字式控制器的解决方案。使用2个 PLC的模拟量扩展模块EM235,1块配置成电压型的输入,1块配置成电流型的输入。利用PLC的软件设计算法,对模拟量信号进行缩放处理,将不同量纲的给定与反馈,直接通过CPU计算出偏差。考虑到EM235进行模数转换时存在干扰,为提高模数转换精度,采用滑动平均值滤波算法对EM235的采样值进行滤波处理。
1 PLC对模拟量信号的处理
PLC具有极高的可靠性、丰富的扩展模块、丰富的内置集成功能等特点,在工业现场有着广泛的应用。PLC除了可以对数字量信号进行处理外,还可以通过模拟量扩展模块,对采集到的模拟量信号进行处理。
选用西门子的S7-226 CPU模块作为主控制器,EM235作为CPU模拟量扩展模块。S7-226 CPU集成了24输入/16输出共40个数字量I/O点,而且最多可连接7个扩展模块,具有13 kB程序和数据存储空间。EM235具有4路模拟量输入,1路模拟量输出。针对不同的输入信号,通过DIP开关,可将EM235设置为电压单极性输入、电压双极性输入与电流输入。EM235是高速12位模拟量输入模块,它可直接与变送器相连,在149 μs内将模拟量输入转换成相应的数字值。
工业现场存在的各种被控参数(如,温度、压力、流量、液位等),通过相应的变送器,转变为电流或电压。EM235采集来自变送器的模拟量,并将其转换成数字量。如果配置EM235的输入范围是单极性的,则EM235将模拟量信号转换为0~32 000的数字量;如果配置成双极性的,则将模拟量信号转换为-32 000~+32 000的数字量。
2 数字滤波算法
由于控制现场存在诸多干扰因素,使EM235转换出的数字量明显偏离了真值,信号的模数转换存在较大误差。为此,采用数字滤波算法,对EM235采集到的模拟量进行滤波处理,以提高模数转换的精度。
PLC常用的数字滤波算法是平均值计算法[3],即对EM235采样得到的N个数字量求加权平均值,此平均值作为EM235转换的最终结果。基本的平均值算法有算术平均值法、滑动平均值法和抗干扰平均值法。[4]
算术平均值法是利用EM235对模拟量信号采样N次,然后对N次模数转换得到的数字量求平均值,该值作为EM235模数转换的最终结果。该算法实现简单,适用于被控参数在某一值附近上下波动,且波动幅度不大的情况,但缺点是响应速度慢,每得到1次模数转换的结果,需要等待N次模拟量采样结束。抗干扰平均值法与算术平均值法类似,只是将N次采样到的模拟量转换为数字量后,舍去最大值与最小值,然后对剩余的(N-2)个数字量求平均值。这在一定程度上提高了模数转换精度,但是仍然存在实时性不高的问题。
滑动平均值滤波法与算术平均值法相比,每采样1次模拟量信号,即可计算出本次模数转换的最终结果,是实时性较好的数字滤波算法。在PLC的V存储区开辟一数据队列,数据队列的长度固定为N。如果是第一次采样,则将该采样值赋值给存储区内的所有队列变量。然后每进行1次新的采样,就将存储区队列中除了队首的(N-1)个数据依次向前移位,把最新采样的结果存放在存储区队列的末尾,将原来位于队首的采样结果挤出存储区。此时,产生了一新的数据队列,将此队列中的N个数据进行算术平均计算,就可得到最新的模数转换结果。[5]EM235每采样1次,数据队列便随之更新,并且队列中保留了最新的采样结果。经过滤波后,可有效降低干扰所产生的误差,提高模数转换的精度。滑动平均值滤波算法程序流图如图1所示。
3 PLC对模拟量信号的缩放处理
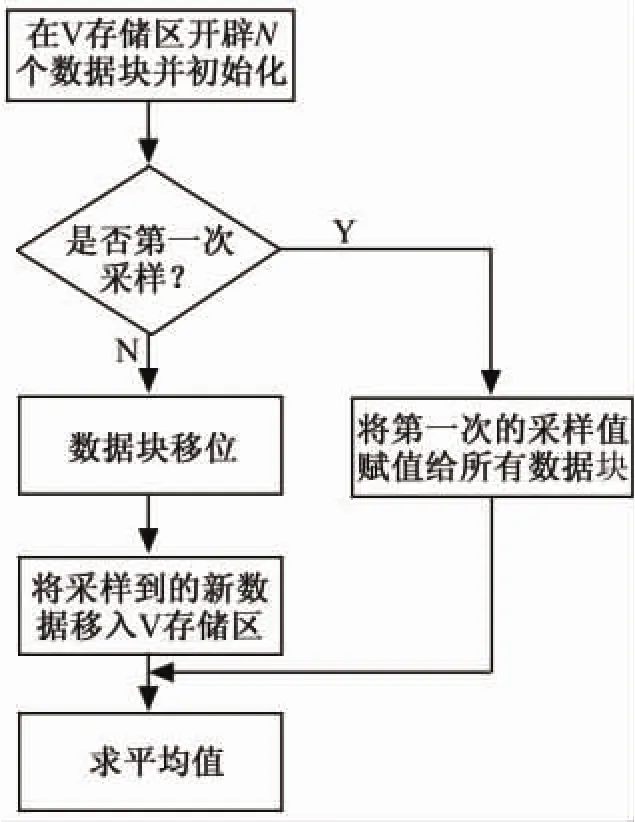
图1 滑动平均值滤波算法程序流图
给定信号反映了被控参数的期望值,反馈信号反映了变送器检测被控参数的实际值。当给定与反馈属于不同量纲时,通过PLC对模拟量信号进行缩放处理,缩放处理后得到的数字量通过CPU直接相减得出偏差信号。
为得出缩放公式,首先设置以下变量,设Ov为缩放后的数字量输出值;Iv为模拟量输入值;Osh、Osl分别为缩放后输出的数字量高限值与低限值;Ish、Isl分别为输入的模拟量高限值与低限值。当EM235采集到模拟量信号后,可根据Ov=[(Osh-Osl)(Iv-Isl)/(Ish-Isl)]+Osl缩放公式对模拟量信号进行缩放处理:
使用2块EM235模块。将第一块配置成电压单极性输入,采集来自变送器的0~10 V模拟量信号,EM235将其按线性比例关系转换为0~32 000的数字量。该数字量作为闭环控制系统的给定信号,不作缩放处理,直接送入V存储区。将第二块配置成电流输入,采集来自变送器的4~20 mA模拟量信号,EM235将其按线性比例关系转换为64 00~32 000的数字量。该数字量需要PLC对其进行缩放处理后,才能作为闭环控制系统的反馈信号。
主程序由子程序SBR_0和子程序SBR_1组成。使用首次扫描时为1的特殊存储器字节的状态位SM0.1调用子程序SBR_0。SBR_0用于数据初始化。设置VD1=32 000、VD4=0,用来存放缩放后输出的数字量高限值与低限值(Osh、Osl);设置 VD8=32 000、VD12=6 400,用来存放模拟量输入的高限值与低限值(Ish、Isl)。
子程序SBR_1用于计算偏差。电压信号由EM235转换成数字量后存入AIW0,然后转换为双字类型送入V存储区作为给定值;而电流信号由EM235采集后存入AIW6,将其转换为双字类型后送入V存储区,然后通过缩放公式计算出缩放后的数字量输出值 Ov。缩放处理后,4~20 mA的模拟量对应的数字量不再是6 400~32 000,而是同比例缩放的数字量0~32 000。此时,将Ov作为反馈值,可直接与给定值相比较计算出偏差。得到的偏差信号是数字量,通过PLC按照预先设置的算法对偏差进行数学运算,可以校正扰动对控制系统造成的影响,PLC的程序流程图如图2所示。
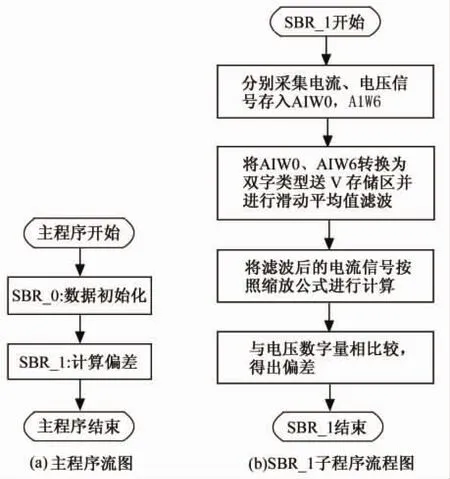
图2 PLC的程序流程图
4 结语
针对模拟式控制器,需要硬件电路转换属于不同量纲的给定与反馈才能计算偏差的特点,提出一种不需要转换电路,通过PLC在软件中对采集到的模拟量进行缩放处理,直接计算出偏差的方案。为减小模数转换的误差,提高模数转换的实时性,采用PLC对模拟量信号的滑动平均值滤波处理。实践证明,该方法不仅节省了硬件资源,而且降低了信号采集过程中的干扰因素,可广泛应用于工业闭环控制系统当中。
[1]丁炜,曹秀敏,荆珂,等.过程控制仪表与装置[M].北京:电子工业出版社,2011:59-68.
[2]吴勤勤.控制仪表及装置[M].北京:化学工业出版社,2010:20-22.
[3]任克强,刘晖.微机控制系统的数字滤波算法[J].现代电子技术,2003(3):15 -18.
[4]郑涛,石秀华,许晖.数字滤波新方法尝试与验证[J].测控技术,2004,23(4):19 -20.
[5]杨克远,周丽佩,赵越,等.一种改进的数字滤波方法[J].大庆石油学院学报,2003,27(2):45 -46.
The Calculation Method of Deviation Signal for Closed-loop Control System Based on PLC
HAN Liang
(Department of Electronic and Electrical Engineering,Shanxi Institute of Mechanical and Electrical Engineering,Changzhi 046011)
In the closed-loop control system,reference signal and feedback signal are compared by the controller to generate deviation signal,and then the deviation is calculated according to the control law to realize the automatic control of the process parameters.When the reference signal and feedback signal belong to different dimensions,the analog controller needs the hardwired connection as a converter to calculate the deviation.This paper proposes a method directly calculating the deviation signals by designing PLC software rather than relying on a converter.The moving average filtering and scaling of analog signals are particularly elaborated upon.Practice shows that the method can save hardware resources,improve the capacity of resisting disturbance,and thus be widely applicable in industrial control system.
PLC;analog signal;moving average filtering;scaling
TP274+.2
A
1671-0436(2012)06-0021-03
2012-12-05
韩亮(1981— ),男,硕士,助教。
责任编辑:张秀兰
