动态规划算法在被动声呐目标检测中的应用
2012-07-11柳俊峰章新华许林周
柳俊峰,章新华,许林周
(海军大连舰艇学院,辽宁 大连 116018)
动态规划算法在被动声呐目标检测中的应用
柳俊峰,章新华,许林周
(海军大连舰艇学院,辽宁 大连 116018)
基于动态规划的检测前跟踪方法可用于检测跟踪低可观测目标。它利用检测前跟踪的技术在检测目标的同时给出目标航迹的优点,实现对低信噪比下目标的检测与跟踪。本文分析了动态规划法进行弱小目标检测的基本原理,结合水下目标检测的特殊性对该算法进行了修正,得到了适应水下目标的检测前跟踪方法。通过实际的海试数据进行验证,证实了检测前跟踪技术在水声领域进行目标检测跟踪的可行性。
检测前跟踪;动态规划;被动目标检测
0 引言
检测前跟踪(Track-Before-Detect)是一种新兴的主要用在红外图像检测弱目标的方法[1-4],即对单次观测数据先不进行判断,而是结合图像特点,对目标进行多次观测,计算出目标在各帧图像之间的移动规律,预测目标在下一帧图像的可能出现位置,同时在帧与帧之间将多次扫描得到的数据沿着预测轨迹进行几乎没有信息损失的相关处理,从而改善目标的信噪比,提高检测性能,在得到检测结果的同时获得目标航迹,在低信噪比下有强大的检测能力。
动态规划算法(Dynamic Programming)最早是由美国数学家贝尔曼等于1951年提出的,基本思想是采用多阶段决策策略,将1个N维问题转换为个N个一维问题,对问题进行分级处理[5]。动态规划算法已经广泛应用到各个领域,前期在红外图像处理方面[6]进行红外目标的检测与跟踪,后期动态分配法应用到雷达领域,从单个目标的检测与跟踪[7-8]发展到多目标检测跟踪[5,9],从低速度目标的检测跟踪[10]发展到高速目标的检测[11-12]。针对这些算法的广泛的应用,检测前跟踪动态规划算法的性能也在不断地得到验证[13],较之常规的检测跟踪方法具有很大的优势。
在红外图像与雷达中,目前研究的检测前跟踪动态规划法主要集中在笛卡尔坐标下直线运动目标,其状态转移与测量方程存在一定的线性关系。但是在水声领域被动传感器里面,通过水声换能器接收到的声压信号,经过基阵的波束形成以后,只有来自目标的能量与传感器测量的目标的方位信息,并且目标的测量数据与运动状态之间存在很大的非线性关系。此外,由于海洋环境的复杂性,目标信号淹没在海洋噪声下,信号的检测存在很大难度。常规检测方法是,首先通过门限进行每次接收的数据做门限检测,然后利用超过门限的测量做后续的跟踪处理。这种方法虽然可以有效抑制数据流,但是同样损失了许多有用信息,尤其是在潜艇隐身技术的提高与噪声自适应抵消技术的广泛应用的背景下。检测前跟踪则能很好地解决这个问题。
1 目标运动态势与测量模型
本文所采用的数据是在黄海某近海区域内真实海洋环境下所做的实验。该次试验中,由一刚性线列被动接收阵对监测区域内经过的目标进行检测跟踪,目标运动状态与传感器所成的态势如图1所示。目标的初始位置与接收阵约成120°夹角,目标在此方位附近进行斜向运动,信号录取时间为100 s。
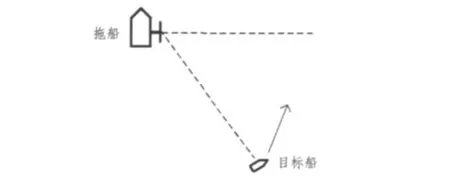
图1 目标运动态势Fig.1 State of motion
假设在k时刻传感器接收的方位能量向量为

其中,B为测量的方位,B∈(0,180°)。
到k时刻接收到的累积能量向量为

2 动态规划算法
动态规划在检测的各个测量时刻上按照特定准则选择某个变量的值,使得全过程按该指定的准则达到最优,每个时刻上状态变量的选择就是问题的决策,一般用决策函数uk(xk)表示决策过程。整个决策过程相对应的决策函数序列

称为策略[4]。决策过程还必需有一个度量决策好坏的准则,称为值函数。

其中,Ik(xk)为从初始状态x1到终点状态xk的最优值函数或目标函数。于是问题归结为选择1个k阶的策略使得值函数最大。

其中,φk(xk)为决策过程中使得值函数达到最大值时对应的目标的状态。
由纯方位被动传感器测量所得到的目标的测量为一维方位信息,不包含距离信息,因此在最佳路径选择时与红外图像和雷达中的选择方式有所不同。由于未知目标出现的先验信息,缺乏相应的目标状态估计,需要对所获得的测量向量进行逐个方位的检测,以此来确定满足条件的状态预测。
动态规划的基本流程如下:
1)初始化
对于k=1的时刻,

2)递推
对于k=2时刻,首先采用的矩形方位波门进行关联,波门的大小选择为M=5,则第2次的预测为

在得到前2次的关联测量以后,通过直线外推得到预测方位,计算前2次的测量误差作为下一时刻的关联确认区域的大小,则:
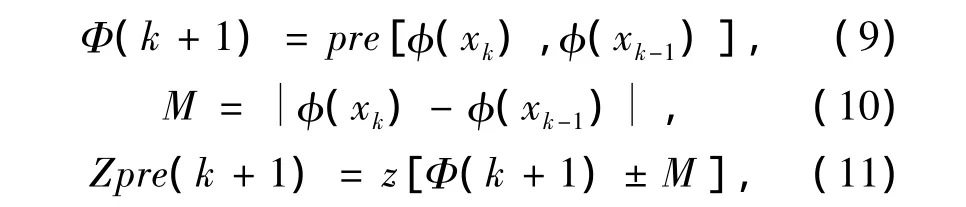
则对于k≥2,

3)终点
找到满足

状态值的估计值x^k,其中VT为门限。
4)回溯
对于超过门限的路径,由终点状态估计x^k逆推至起点,则有目标的航迹为

3 检测门限

其中,S为接收的目标信号功率;N为接收的噪声功率。图2为声学手册(P371)中声呐接收器的工作特性曲线。
在保证虚警概率不大于0.001,检测概率不小于0.6时,选择门限为Vt=10。
在声呐接收器中,接收信号的强度与接收频带内噪声的功率之比定义为检测门限,则
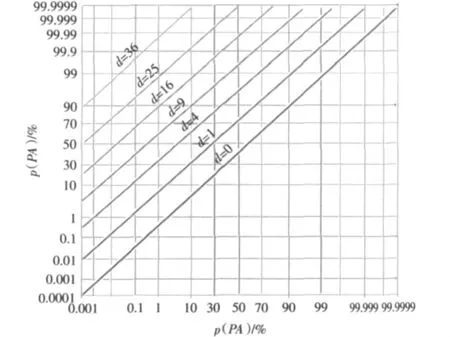
图2 接收器工作特性曲线Fig.2 Characteristic curve of the receiver
4 海试数据验证
为了验证算法的有效性与可行性,采用真实海洋环境中所做的一次实验数据,目标运动态势如图1所示。图3是经基阵聚焦最小无失真(MVDR)波束形成接收器接收的目标功率强度示意图。
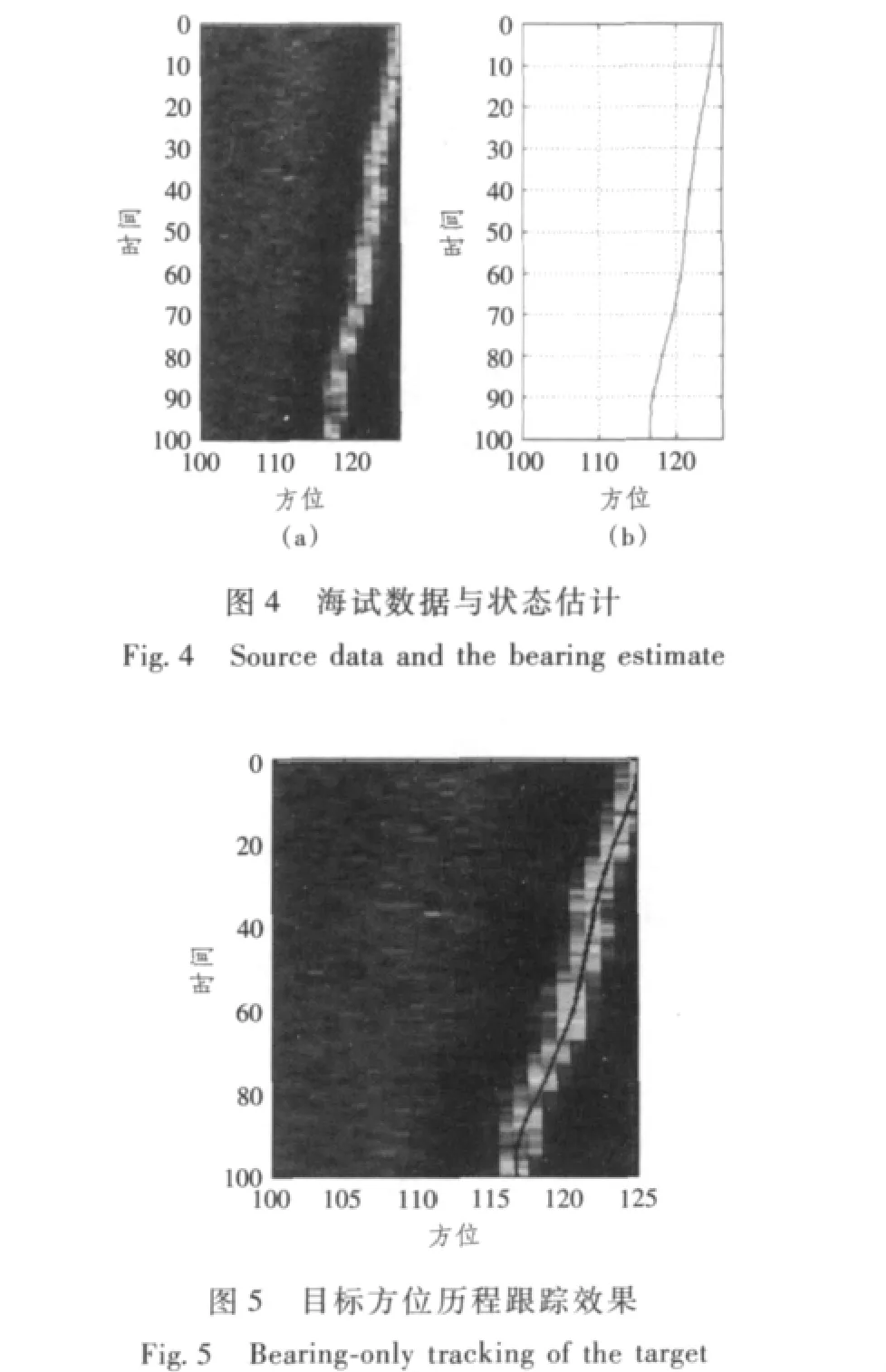
在实际数据的实时处理中,由于未知目标具体方位与运动状态,需要对所得到的测量向量的每个方位进行决策,从而得到每次处理中的最大值函数,估计出此时值函数取得最大值时对应的方位信息,将此作为目标的状态估计值,然后预测递推下一次数据中目标可能出现的位置,在反复的递推中得到目标的状态估计值,如图4所示。其中图(a)为传感器接收目标的测量向量的原始数据,图(b)为经过动态规划算法递推估计得到的最终目标状态估计。图5为得到的方位历程跟踪效果图。
5 结语
动态规划算法能以有效的方式对所有可能的目标航迹进行搜索,并对这些航迹进行能量的相关积累,当航迹上的能量累积值超过门限时,则认为检测到目标并返回目标的航迹与状态估计。从图4与图5中也可以发现,检测前动态规划的方法能对水中目标信号进行有效的检测与跟踪,目标的状态估计比原始显控瀑布图清晰,有效减少了目标信号在帧与帧之间的扩散现象。由实测数据的最终验证结果看,利用动态规划算法进行水中目标的检测跟踪是可行的。
[1]BARNIV Y.Dynamic programming solutioin for detecting dim moving target[J].IEEE Trans.On AES,1985,AES-21,(1):144 -155.
[2]ARNOLD J,SHAW S,PASTERNACK H.Efficient target tracking using dynamic programming[J]. IEEE Transactions on Aerospace and Electronic Systems,1993,29(1):44-56.
[3]TONISSEN S M,EVANS R J.Performance of dynamic programming techniques for track-before - detect.[J].IEEE Transactions on Aerospace and Electronic Systems,1996,32(4):1440 -1451.
[4]强勇,焦李成,保铮.动态规划算法进行弱目标检测的机理研究[J].电子与信息学报,2003,25(6):721 -727.
QIANG Yong,JIAO Li-cheng,BAO Zheng.Study on mechanism of dynamic programming algorithm for dim target detection[J].Journal of Electronics and Information Technology,2003,25(6):721 -727.
[5]胡琳,万洋.基于动态规划的多目标的TBD算法[J].舰船电子工程,2010,30(1):75 -78.
HU Lin,WAN Yang.Track-before-detect algorithm of multi-target based on dynamincal programming[J].Ship Electronic Engineering,2010,30(1):75 -78.
[6]王新余,黄林梅,张桂林.基于动态规划的红外弱小运动目标的实时检测方法研究[J].计算机工程与应用,2003,39(23):24 -26.
WANG Xin-yu,HUANG Lin-mei,ZHANG Gui-lin.Study on real-time detection method for the moving infrared small dim target based on dynamic programming[J].Computer Engineering and Applications,2003,39(23):24 -26.
[7]邓晓波,皮亦鸣,曹正林,付合山.基于TBD方法的弱小目标预警研究[J].现代雷达,2009,31(12):57 -61.
DENG Xiao-bo,PI Yi-ming,CAO Zheng-lin,FU He-shan.Early detection of small targets based on track-beforedetection method[J].Modern Radar,2009,31(12):57 -61.
[8]李涛,吴嗣亮,曾海彬,侯舒娟.基于动态规划的雷达检测前跟踪新算法[J].电子学报,2008,36(9):1824-1828.
LI Tao,WU Si-liang,ZENG Hai-bin,HOU Shu-juan.A new radar track-before-detectalgorithm based on dynamic programming[J].Acta Electronica Sinica,2008,36(9):1824-1828.
[9]曲长文,黄勇,苏峰.基于动态规划的多目标检测前跟踪算法[J].电子学报,2006,34(12):2138 -2141.
QU Chang-wen,HUANG Yong,SU Feng.Radar trackbefore-detect algorithm of multitarget based on the dynamic programming[J].Acta Electronica Sinica,2006,34(12):2138-2141.
[10]黄勇,曲长文,苏峰,何友.基于动态规划的低可观测目标的检测与跟踪[J].海军航空工程学院学报,2004,19(5):521-523.
HUANG Yong,QU Chang-wen,SU Feng,HEYou.Detecting and tracking dim target using dynamic programming[J].Journal of Naval Aeronautical Engineering Institute,2004,19(5):521 -523.
[11]李涛,曾海彬,田中成,张斌.一种高速运动微弱目标雷达检测前跟踪的新算法[J].数据采集与处理,2008,23(6):641-645.
LI Tao,ZENG Hai-bin,TIAN Zhong-cheng,ZHANG Bin.New radar track-before-detect algoritm of weak target with high velocity[J].Journal of Data Acquisition &Processing,2008,23(6):641 -645.
[12]JOHNSTON L A.Performance analysisofa dynamic programming track before detect algorithm.[J].IEEE Transactions on Aerospace and Electronic Systems,2002,38(1):228-242.
[13]罗倩,王岩飞.雷达微弱目标检测的有效方法[J].计算机工程与设计,2009,30(21):4964 -4966.
LUO Qian,WANG Yan-fei.Effctive algorithm for radar dim moving target detection[J].Computer Engineerging and Design,2009,30(21):4964 -4966.
Application of dynamic programming in passive sonar for detecting target
LIU Jun-feng,ZHANG Xin-hua,XU Lin-zhou
(Dalian Naval Academy,Dalian 116018,China)
The dynamic programming(DP)algorithm,using the advantage of the track-before-detect giving the track while detecting the target,is used to detect and track low-observable targets under low signal-to-noise ratio(SNR).In this paper the fundamental principles of the DP is formulate,then we modify it and make it useful in passive sonar signal processing.Finally we prove it practically in passive sonar for targets detecting and tracking after testing it using the data from real marine environment experiment on a linear array.
track-before-detect;dynamic programming;passive target detect
power spectrum
TB56
A
1672-7649(2012)03-0095-04
10.3404/j.issn.1672-7649.2012.03.021
2011-05-27;
2011-07-05
声呐技术国防科技重点实验室开放基金资助项目(F201106)
柳俊峰(1986-),男,硕士研究生,研究方向为水中被动目标检测与跟踪。
图3 接收功率示意图 Fig.3
