一种利用测角信息改善空中机动平台无源定位精度方法
2012-07-11夏清涛张国栋
夏清涛,张国栋,杨 揆
(海军工程大学电子工程学院,湖北 武汉 430033)
一种利用测角信息改善空中机动平台无源定位精度方法
夏清涛,张国栋,杨 揆
(海军工程大学电子工程学院,湖北 武汉 430033)
针对机载光电测角信息采样率远高于飞机导航数据采样率的情况,为了充分利用测角信息,提出了一种利用高频率光电测角信息改善空中机动单站平台目标定位精度的方法。在进行数据的时间配准前通过对测角信息进行线性滑动平滑,消除了测角信息的随机噪声,进而提高了定位精度和稳定性。试验结果验证了该方法的有效性,对目标跟踪的工程实践具有一定指导意义。
线性滑动平滑;最小二乘;空中机动平台;光电载荷
0 引言
在现代战争中,舰载武器系统为了完成超视距攻击任务,往往需要借助各种类型空中侦察平台的力量。其中,无人机具有远距离及强机动的特性,若在其上搭载方位探测精度高但作用距离近的光电探测设备,可以有效增大光电探测设备的探测距离,既能充分发挥光电载荷的优势,又可弥补探测距离上的不足,实现对目标的高精度定位[1],从而满足舰载武器系统超视距攻击的需要。文献[2]提出了一种利用最小二乘原理建立的空中机动单站平台目标定位模型,但在工程实践中发现,由于GPS数据和飞机姿态数据的采样率为1 Hz,光电探测设备对角度数据的采样率为10 Hz,在对以上数据进行时间配准时浪费了大量光电测角数据,使系统定位精度受到一定影响。因此,如何充分利用高频率高精度的光电测角信息以提高目标定位精度,对工程应用具有重要的意义。本文提出了一种利用高频率光电测角信息改善空中机动单站平台目标定位精度的方法,并用实际工程数据验证了算法的有效性。
1 目标定位方法
1.1 定位模型
设空中平台的航向为Kw,航速为Vw,在初始时刻t1,目标相对空中平台的初始斜距为D1,俯仰角为ε1,方位角为β1;在时刻tj,目标相对空中平台的斜距离为Dj,俯仰角为 εj,方位角为 βj。设目标作匀速直航,未知航向为Km,未知航速为Vm。目标运动的几何态势如图1所示。根据相对运动的空间几何封闭性原理,由图1中四边形O'A'B'C'得到[3]:
式中:φm为目标俯冲角;φw为空中平台俯冲角。
以此为基础,利用最小二乘原理,经过一定的转化处理后,可以实现对目标的纯方位定位。
图1 目标运动态势图Fig.1 Target motion situation
1.2 定位过程
式(1)的推导是在地理坐标系下完成的。输入的测量数据如空中机动平台的GPS信息是在大地坐标系下得到的,光电载荷的角度测量数据则是在空中平台坐标系下得到的,而最终的定位结果如目标的经度、纬度等还需要变换到大地坐标系下。各数据及坐标系转换间关系如图2所示。

图2 数据及坐标转换流程Fig.2 Conversion process of data and coordinate
在空中平台对目标定位的过程中会涉及到以下几个常用坐标系[4-5]:
1)WGS-84大地坐标系。空中机动平台的GPS位置数据(经度、纬度、高程)在此坐标系下测得;
2)地球坐标系。要应用GPS位置数据,首先就要转化到该坐标系下;
3)地理坐标系。文中提出的无源定位算法的模型即是在此坐标系下实现的;
4)空中平台航迹坐标系[6];
5)空中平台坐标系。光电载荷测角数据是在此坐标系下得到的。
为利用定位模型进行解算,需要将测角数据转换到空中平台航迹坐标系中,转换时测角数据应当与GPS数据、飞机姿态数据进行时间配准,最普遍的方法是取与GPS数据和飞机姿态数据时间上最为接近的测角数据进行配准,丢弃其他测角数据。
2 对测角信息进行平滑的目标定位方法
图3 采样间隔图Fig.3 Sample interval
对序列方位数据分析表明,当目标匀速直航时,目标方位随时间变化的规律实际上是1条曲率很小的曲线,而在一定时间间隔内,可用直线近似代替[7]。因此,在对量测数据进行野点剔除后,采用直线滑动平均法对光电测角数据进行平滑处理,消除高频噪声,再进行目标定位解算。
直线滑动平均法就是利用最小二乘法原理对离散数据进行线性平滑的方法。该方法主要根据某点邻近的采样点的波幅来对该点进行波幅修正,从而达到对波形去噪的目的,可以对邻近点作简单的平均,也可根据需要对邻近点进行加权平均[8]。以三点线性滑动平滑为例:
对第i时刻的测角数据,取其本身及前后共3个数据点为 (xi-1,yi-1)、(xi,yi)、(xi+1,yi+1)。根据前面假设,用直线拟合这3个数据点,设拟合方程为[8]:

由上式求出的x=xi时的ui=a0+a1xi,此值即为yi的平滑值。在此,为了计算方便,对自变量作线性变换:

其中:xi-1,xi,xi+1对应的zi-1,zi,zi+1分别为 -1,0,1,Δz=zi-zi-1=1。现在可对(zi-1,yi-1)、(zi,yi)、(zi+1,yi+1)用直线

根据最小二乘原理,应使偏差平方和

为最小。按照极值原理,分别求Q对b0和b1的偏导数,得到使Q为最小的条件:
将上式展开,并将zi-1=-1,zi=0,zi+1=1代入得到
由于zi=0,故由式(3)可知ui=b0。则在z=zi和x=xi处,对因变量作三点线性滑动平滑的算式是

其中,ui为yi的平滑值。而在i=1和i=n时,由于其前面(后面)的点不存在,故采用与其相邻的三点作滑动平滑,用相同的方法可以推导出:

对于i=n,

同理,可以用五点、七点以至m点来平滑观测数据。通常来讲,取m值越大,对高频噪声抑制得越强。本文采用五点2次多项式平滑法。计算公式为:
根据最小二乘理论,式(10)的估计误差方差为:

式中:2n-r为自由度,即数据数m=2n+1减去带估计参数r+1,r为多项式次数。本文中,m=5,r=2。
对相邻2次GPS数据之间的测角数据应用式(11)平滑后再进行时间配准,估计精度可由式(11)计算得到。这样,虽然仍有大量测角数据没有参与时间配准,但是参与配准的测角数据利用它们滤除了高频噪声,改善了数据质量。
算法流程如图4所示。
3 试验验证
为验证上述方法的有效性,选取2009年下半年的试验测量数据进行分析。具体试验背景为:以海上匀速直航的靶船作为目标,空中机动平台挂载光电载荷,以一定的航路对目标进行跟踪。空中平台的GPS位置数据及姿态角度可以实时得到,目标的GPS位置也是事先已知;根据二者的GPS位置数据可以计算目标相对于空中机动平台的方位角和俯仰角;由于GPS精度很高,计算得到的角度值可以作为理论真值。
原始测角数据和经过平滑处理的测角数据对比如图5所示。
由式(11)计算得到的方位角五点二次多项式误差方差为7.302 6;俯仰角五点2次多项式误差方差为1.597 1。
由结果可以看出,平滑很好地滤除了量测数据所包含的随机噪声,并且使数据变化趋于平缓,可以有效防止数据突变对定位算法带来的不利影响。
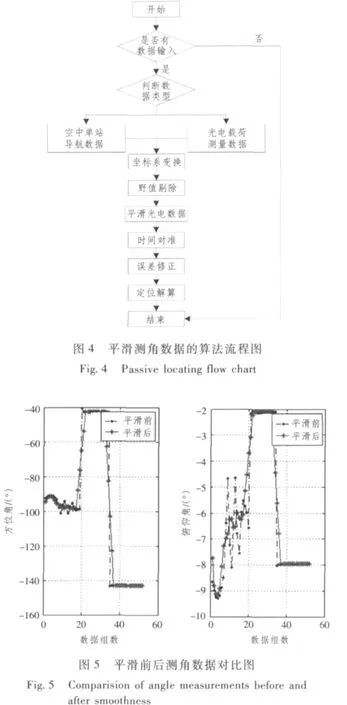
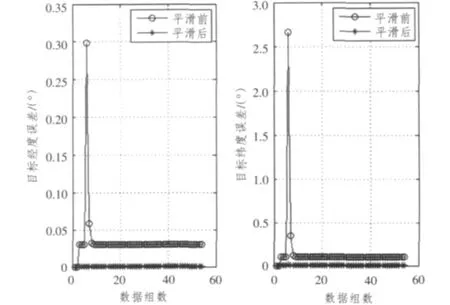
图6 平滑前后定位结果误差对比图Fig.6 Comparision of location error before and after smoothness
利用平滑前后的测角数据分别对目标进行定位跟踪,跟踪误差结果如图6所示。
结果说明,经过平滑的角度信息对目标定位解算更加有利,降低了算法的跟踪误差,并且防止了跟踪过程中算法的发散,得到了更为精确的目标状态估计。
4 结语
针对空中机动单站平台所搭载的光电载荷测角频率高于自身导航数据采样频率的情况,提出了一种
利用平滑方法消除测角数据随机噪声,进而提高目标定位精度的方法。试验结果表明,在不增加设备成本下,该方法可有效提高算法的收敛精度和稳定性,具有一定工程实践指导意义。
[1]RONG L X,JILKOV V P.Survey of maneuvering target tracking[J].IEEE Transactions on Aerospace and Electronic Systems,2005,41(4):1255 -1321.
[2]曲毅,刘忠,郭睿,黄亮.基于光电观测信息的空中机动平台被动跟踪研究[J].系统工程与电子技术,2009,31(5):1093-1096.
[3]黄亮,刘忠,李剑辉,刘松林.空中机动平台光电载荷无源定位算法及坐标变换分析[J].海军工程大学学报,2009,(6):36 -40.
[4]周宏仁,敬忠良.机动目标跟踪[M].北京:国防工业出版社,1991.
[5]RICHARD A P.Electronic warfare target location methods[M].Boston:ArtechH ouse,2005.
[6]王剑锋,卢利斌,金国栋.无人机对目标的大地定位[J].战术导弹技术,2005,(1):37 -40.
WANG Jian-feng,LU Li- bin,JIN Guo-dong.Target positioning in geodetic coordinate for UAV[J].Tactical Missile Technology,2005,(1):37 -40.
[7]代广进,侯正信.小波域信号去噪算法[J].电子测量技术,2005,(6):37 -42.
DAI Guang-jin,HOU Zheng-xin.A new model of signal denoising in wavelet domain[J].Electronic Measurement Technology 2005,(6):37 -42.
[8]柳锦森,高飞,过家春.线性滑动平滑在变形监测数据处理中的应用[J].勘察科学技术,2008,(4):53 -55.
A method of improving aerial mobile platform passive location's precision using angular measurements
XIA Qing-tao,ZHANG Guo-dong,YANG Kui
(College of Electronic Engineering,Naval University of Engineering,Wuhan 430033,China)
Aiming at the situation that angular sampling rate of aircraft is much higher than the rate of aircraft navigation data sampling,in order to make full use of angular measurements,a method of improving the aerial mobile platform passive location's precision is presented up,which uses high-frequency angular measurements.Before the data time registration,using linear slippage smoothness to smooth angular measurements,eliminating the random noise of angular measurements,so the location's precision and stability get improved.Experimental results show the effectiveness of this method,the method has a certain significance on the engineering practice of target tracking.
linear slippage smoothness;least-square estimation;aerial mobile platform;photoelectric payload
TN953
A
1672-7649(2012)03-0091-04
10.3404/j.issn.1672-7649.2012.03.020
2011-04-08;
2011-05-11
海军工程大学自然科学基金资助项目(HGDQNJJ10024)
夏清涛(1979-),男,硕士研究生,讲师,主要研究方向为火力控制系统。
