航空磁探中水下目标的自适应探测方法
2012-07-11林春生
邓 鹏,张 坚,林春生
(1.海军工程大学兵器工程系,湖北 武汉 430033;2.海军潜艇学院战略导弹与水中兵器系,山东 青岛 266071)
航空磁探中水下目标的自适应探测方法
邓 鹏1,2,张 坚1,林春生2
(1.海军工程大学兵器工程系,湖北 武汉 430033;2.海军潜艇学院战略导弹与水中兵器系,山东 青岛 266071)
目前普遍采用的飞机磁场模型存在一定的复共线性,传统方法很难准确计算其模型系数。模型系数的不准确对水下磁异常信号探测的影响也很大。自适应探测方法假设飞行测量过程为平稳随机过程,利用对背景噪声的统计特性的学习,实现飞机背景噪声的白化。根据磁性目标的时序特点和噪声的统计特性提出的探测因子,在强起伏干扰背景下对磁异常信号具有较强的探测能力,同时简化了补偿过程,提高了探测效率,具有工程应用价值。
磁异常探测;航空磁探;自适应滤波;小尺度信号
0 引言
航空磁探技术是在二战中由于探测潜艇的需要而发展起来的。战后,又在地质调查、矿产普查和地球科学研究工作中得到广泛应用。航空磁探是通过测量磁性物质在地磁场中迭加产生的异常磁场来探测目标的。一般由磁性目标产生的磁异常信号十分微弱,例如离中型潜艇300 m的上空,它所产生的磁异常仅有0.5~1 nT,是地磁场的几万分之一。而1架中型飞机在距离机体2~3 m处产生的磁场也能达到几十nT的量级。
为了在复杂的飞机磁场噪声和地磁场中检测出磁异常信号,国内外学者很早就对运动飞机产生的磁场进行了研究。早期的有 Tolles 和 Lawson[1-2],后来又有 Paul Leliak[3],S.H.Bickel[4-5],Luyendyk[6],吴文福[7]等。他们主要是通过建立运动飞机的磁场模型来补偿掉外部干扰磁场,从而检测出磁场的异常。但是,这类模型具有很强的复共线性,常采用的岭估计、主成分估计等方法计算量大,估计精度不高。
自适应探测方法将磁性目标的磁场信号看作小尺度信号。在此前提下,利用背景噪声的统计特性自适应地调整滤波器参数,抑制干扰信号,增强目标信号。根据小尺度信号的时域特点和最小均方误差准则,提出检测因子,对滤波后的信号提取目标特征,识别异常信号。实验结果表明,该方法对强起伏干扰背景下的弱磁异常信号具有较强的检测能力。同时,该方法简化了飞机磁场的补偿过程,缩短了飞行学习时间的距离,提高了探测效率。
1 运动飞机的磁场分析
通常对运动中的飞机磁场采用Tolles-Lawson模型进行分析。飞机与磁性探测仪坐标系的选取方法如图1所示。将磁性探测仪设于原点,X轴和其单位矢量i与飞机的横轴T平行,对T向左为正;Y轴和其单位矢量j与飞机的纵轴L平行,以L向前为正;Z轴和其单位矢量k与飞机的垂直轴V平行,以V向下为正。飞机的运动可以由俯仰角λ、偏航角Ω和横滚角Ψ这3个角度来表示。地磁场矢量的方向由地磁场与x,y,z轴形成的方向角α,β,γ决定。方向余弦(cosα,cosβ,cosγ)可由飞机的机动角、磁偏角和磁倾角表达。飞机的磁航向角θ由左顺时针测量。磁俯仰角φ是地磁场矢量与水平面的夹角,向下为正。
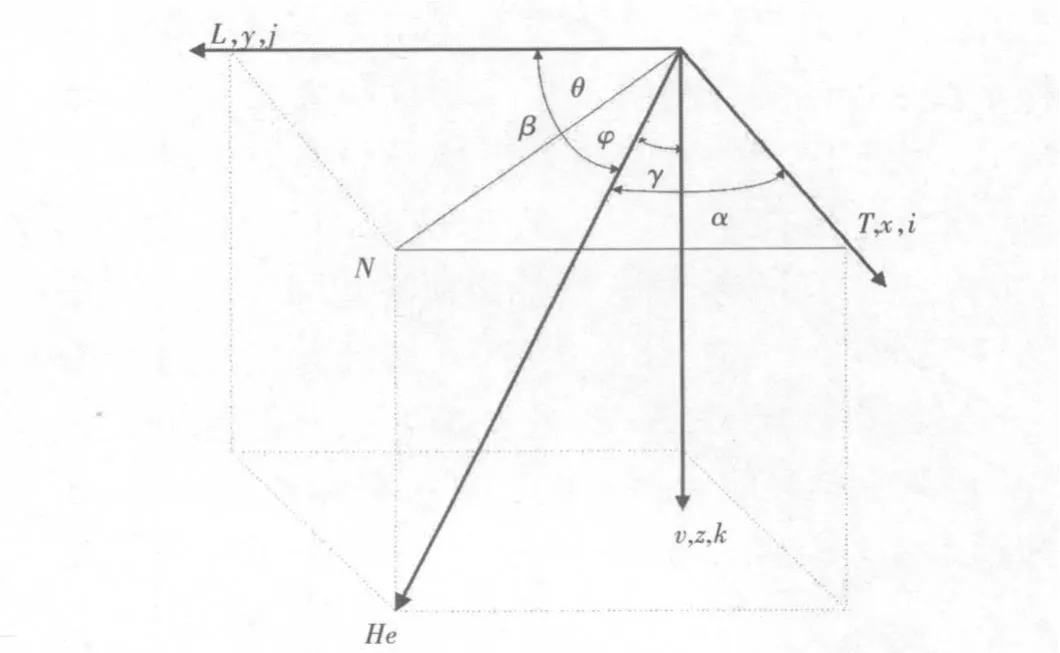
图1 飞机与磁性探测仪坐标系Fig.1 Coordinate of aircraft and magnetometer
对Tolles-Lawson模型分析,可得

式(1)右边第1项为飞机恒定磁场,第2项~第4项为飞机感应磁场,与飞行姿态和地磁场的夹角有关,第5项~第7项为飞机涡流磁场,与夹角关于时间的导数有关。
传统的航空磁探中,飞机起飞后,需要补偿飞机磁场。在高空沿1个方形区域的平行四边作学习飞行。每条边的飞行过程中飞机分别作小角度的俯仰、横滚和偏航动作若干次,再根据飞机机动时所测磁场的变化情况和飞机的机动角度,求解出Tolles-Lawson模型中的18项参数。但是,参数间存在一定相关性,使得模型存在很强的复共线性,很难精确估计模型参数。此外,学习飞行区域的地磁场梯度不能太大,否则会影响模型参数的求解精度。飞机的各种实时机动角度也需要由GPS提供。飞机作完学习飞行后,再降到低空进行探测飞行。根据学习飞行中解出的模型参数和飞机的飞行姿态计算出飞机的实时磁场,与机载磁探仪测得的磁场相抵消,得到地磁场参数,进而判断出有无磁异常信号。
2 小尺度信号的自适应检测

其中,a=[a1,a2,…,aN]为 AR 系数;u(n)均值为0,方差为σ2的白噪声。
滤波器权向量为:

滤波器的输出信号向量为:

通常情况下,机载磁探仪对磁性目标的探测表现为小信号模型的磁异常信号。因此,航空磁探对磁异常信号的探测可以归结为对小尺度信号的检测。根据式(1),飞机磁场在飞行过程中产生波动的主要原因是飞行姿态的变化。在探测飞行时,飞机应该尽量保持飞行姿态的稳定,以减少飞机磁场的干扰。但是,在实际飞行中,由于气压、空气密度等因素的影响,飞机不可能实现完全的平稳飞行。小尺度信号的自适应检测,假设飞机探测飞行为平稳随机过程,利用学习过程中背景噪声的统计特性自适应地调整滤波器参数,使得输出信号白化,从而滤除飞机磁场产生的强起伏杂波,再通过检验因子检测出目标信号。
探测飞行过程为1个平稳随机过程。建立AR模型:

误差信号为:学习过程中,根据最小均方误差准则,最佳滤波器的权向量应使均方误差最小。代价函数为:

采用递推收敛的方法可以找到滤波器权向量的迭代公式:

其中,μ为步长。
学习过程收敛后,得到滤波器传递函数:

根据磁异常信号为小尺度短时信号的时序特点,在未探测到异常信号时进行学习,收敛后输出信号为白噪声,此后探测到异常信号,输出信号将为白噪声与磁异常信号的叠加,由此提出磁异常信号检测因子:

3 实验仿真与分析
某中型飞机采用自适应检测方法进行磁探实验。采集的数据为机载铯光泵测量所得,采样频率20 Hz。飞机飞行高度300 m,航速80 m/s,飞行姿态平稳,飞行方向正北。磁异常信号来源于文献[10],为某中型舰艇的磁通过曲线,信号长度为200。飞行区域地磁场强度55 000 nT。检测因子通过9阶巴特沃兹低通滤波器输出。
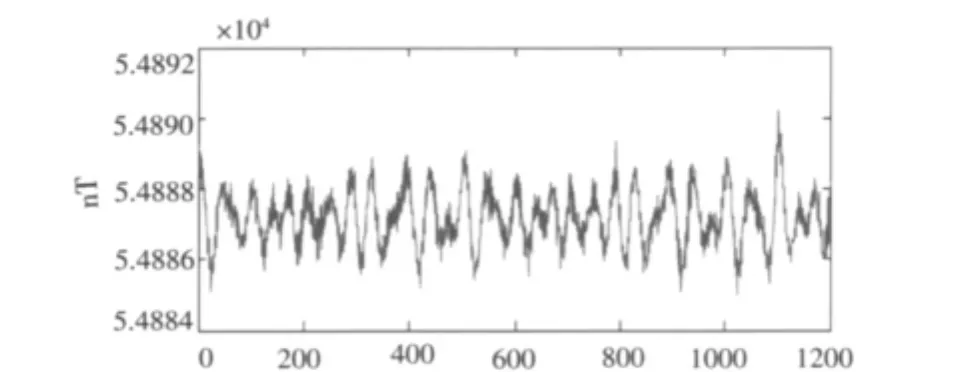
图2 目标信号Fig.2 Target signal
图2中的磁场信号为磁探仪实测数据与目标信号的迭加。图3中的目标信号为目标上方300 m高空磁场通过曲线。从图2和图3可看出,虽然磁异常信号的迭加对飞机磁场有一定影响,但是,与之前的飞机背景噪声相比较,磁异常信号很难直接从背景噪声中区分出来。通过采用自适应检测方法后,从图4中y(n)和e(n)的曲线可以看到,虽然自适应滤波对异常信号有一定效果,但效果仍然不明显。而k(n)的曲线在磁异常信号出现的时间区域波动明显变大,出现了1个高峰值。由曲线变化即可发现检测到磁异常信号。说明检测因子提高了自适应滤波的检测能力。由于采用的自适应输出信号和噪声的关系,k(n)曲线会有不到0.5 s的时延。

根据麦克斯韦方程,磁性物质在空间中产生的磁场,其强度与r3成反比。通过实验,自适应检测方法可以在距离目标433 m远处检测到磁异常信号。图5中的目标信号同时存在2个磁异常信号,第1个目标距离377 m,第2个目标距离300 m,磁场强度为前1个的1倍。可以看到,虽然2组磁异常信号基本上已经完全被噪声信号湮灭,且相互磁场存在叠加,但是采用自适应检测方法仍能发现。
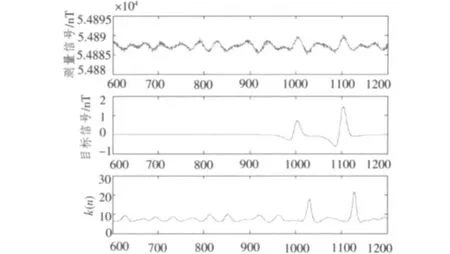
图5 多目标自适应检测Fig.5 Multi-objective adaptive detection
4 结语
根据小尺度信号的时序特点提出的航空磁探自适应探测方法,不仅简化了传统的飞机磁场补偿过程,提高了磁探效率,实现了磁异常的快速探测,而且能同时探测多个磁异常信号,探测距离可达到433 m。自适应检测方法易于硬件实现,且不需要其他辅助设备提供数据。磁探仪安装时也不需要坐标校准,安装要求低。通过实验,该方法在强背景磁场干扰的情况下具有较强的微弱磁异常信号探测能力,对航空反潜和地质探矿有一定意义。
[1]TOLLES W E,LAWSON J D.Magnetic compensation of MAD equipped aircraft[R].New York:Airborne Instruments Lab.Inc.,1950.
[2]TOLLES W E.Compensation of induced magnetic fields in MAD equipped aircraft[R].New York:Airborne Instruments Lab.Inc.,1943.
[3]LELIAK P.Identification and evaluation of magnetic field sources of magnetic airborne detector equipped aircraft[J].IRE Trans.Aerosp.Navig.Electron.1961,8:95 -105.
[4]BICKEL S H.Small signal compensation of magnetic fields resulting from aircraft maneuvers[J].IEEE Trans.on AES,1979,15(4):515 -525.
[5]BICKEL S H.Error analysis of an algorithm for magnetic compensation of aircraft[J].IEEE Trans.on AES.,1997,15(5):620-626.
[6]LUYENDYK A P J.Processing of airborne magnetic data.AGSO journal of australian[J]Geology & Geophysics,1997,17(2):31 -38.
[7]吴文福.16项自动磁补偿系统[J].声学与电子工程,1993,(4):14 -21.
WU Wen-fu.16 automatic magnetic compensation system[J].Acoustics and Electronics Engineering,1993,(4):14-21.
[8]孙恩昌,李于衡,张东英,易克初.自适应变步长LMS滤波算法及分析[J].系统仿真学报,2007,19(14):3172-3175.
SUN En-chang,LI Yu-heng,ZHANG Dong-ying,et al.Adaptive variable-step size LMS filtering algorithm and its analysis[J].Journal of System Simulation,2007,19(14):3172-3175.
[9]魏国珩,曲毅.不同变换域下LMS算法收敛性能分析[J].舰船科学技术,2007.29(6):94 -97.
WEI Guo-heng,QU Yi.Convergence of LMS algorithm in differenttransform domains[J].Ship Science and Technology,2007,29(6):94 -97.
[10]林春生,龚沈光.舰船物理场[M].北京:兵器工业出版社,2007.
Adaptive detection method of magnetic anomaly detection in aeromagnetic survey
DENG Peng1,2,ZHANG Jian1,LIN Chun-sheng2
(1.Departmentof Weaponry Engineering Naval University of Engineering,Wuhan 430033,China;2.Departmentof of Strategic Missile and Underwater Weapons,Navy Submarine Academy,Qingdao 266071,China)
Due to multi-collinearity of the airplane magnetic model,it is difficult to estimate the parameters of model and the underwater magnetic anomaly detection(MAD)are affected too.Flight of aeromagnetic survey was assumed to be stationary processes.Using the statistical characteristics of aircraft's background noise,the adaptive detection method whiten magnetic inference noise.Base on the time-domain characteristics of magnetic target and the statistical characteristics of target and noise,the detection factor was proposed and it has a strong magnetic anomaly detection capability in strong complex noise.Adaptive detection method simplifies the compensation process and improves the detection efficiency of aeromagnetic survey.
magnetic anomaly detection;aeromagnetic survey;adaptive filter;small size signal
TN713
A
1672-7649(2012)03-0076-04
10.3404/j.issn.1672-7649.2012.03.016
2010-07-06;
2010-09-09
国防重点实验室基金资助项目(51444060101JB1108)
邓鹏(1982-),男,博士研究生,研究方向为舰船物理场、微弱信号检测技术与航空磁性探测。
