便携式水下声信标探测定位设备技术设计与实现
2012-07-11曲加圣
曲加圣,杨 松
(中国船舶重工集团公司第七六○研究所,辽宁 大连 116013)
便携式水下声信标探测定位设备技术设计与实现
曲加圣,杨 松
(中国船舶重工集团公司第七六○研究所,辽宁 大连 116013)
针对声基阵水下搜寻定位系统需要使用大型船只及直升机等大型操作平台的缺点,介绍了一种简单、便携、高效的水下声信标探测定位设备的设计与实现方法。利用指向性水听器及混频方法,将需要探测和定位的水下声信标信号通过音频形式输出,充分利用指向性水听器较普通水听器空间增益高以及人耳对信号识别能力强的特点,提高了复杂海况条件下对弱信号的检测能力。阐述了设备的组成、工作原理以及设备主要单元的设计方法,给出了设备样机在海上试验的结果,并对其适用的场合进行了说明。
水声探测;混频;带通滤波;正交编码
0 引言
对水下目标声源进行探测、搜寻和定位时,设置声基阵为目前应用最广泛的一种水下定位技术。根据系统定位基线的长度,可分为长基线阵(LBL)、短基线阵(SBL)和超短基线阵(SSBL/USBL)。这些系统的共同特点是基线较长,超短基线的长度也接近10 m[1-3],需要较大的操作平台,且作用距离短,信号处理的接收设备复杂。
本文根据实际应用需求,针对声信标的信号形式,设计了一种简单、便携、高效的声信标探测定位设备,单人手持即可完成对声信标的大范围搜索,短时间内即可完成对声信标的探测和定位,大大提高了搜索效率,该设备已经在实际使用中得到了很好的应用效果。
1 设备组成及工作原理
便携式声信标探测定位设备主要由指向性水听器、接收处理主单元、控制单元、本振信号单元、功放单元、操作面板单元、电池及电源电路单元以及水密耳机等部分组成。设备采用低功耗设计,利用锂电池供电。进行了密封耐压设计,可整体在水下使用。指向性水听器与系统壳体采用纵向水密通过螺纹连接,防水耳机通过水密连接器与主机相连。系统框图如图1所示,示意图如图2所示。
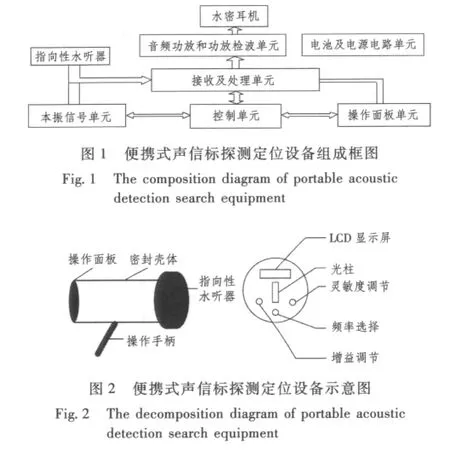
便携式声信标探测定位设备可对5~80 kHz范围内有规律的CW(单频脉冲)信号目标声源探测和搜索,利用指向性水听器的指向性特性,可以像手电筒一样对目标进行探测。水听器信号放大后经过频带范围在5~80 kHz之间的有源带通滤波器,滤波器电路利用2个数字电位器,通过控制单元使其中心频率可调。设备的面板有2个机械编码器,分别用来调节电路的增益大小和选择搜寻的目标频率。
使用时,操作者可通过操作面板机械编码器选择需要探测搜索的目标频率,控制单元根据机械编码器的输出将该信息在LCD显示屏上显示,同时控制带通滤波器的数字电位器变化,调整滤波器的中心频率,并输出混频器的本振信号。本振信号和滤波器输出通过混频电路和音频功放电路,得到人耳能辨别的1.5 kHz左右的声音信号,同时信号的强弱在面板上的LED光柱指示器上也显示出来。
本设备的设计充分利用了指向性水听器较普通水听器空间增益高以及人耳对信号识别能力强的特点,提高了复杂海况条件下对弱信号的检测能力。
2 实现方法
2.1 滤波器设计
接收机的滤波电路是由运放器件构成有源带通滤波器,频率范围在5~80 kHz之间。带通滤波器电路采用多重反馈改进型电路结构,为了使本滤波电路的中心频率连续可调,采用了调整精确、可以程序控制的数字电位器。多重反馈电路结构如图3所示。
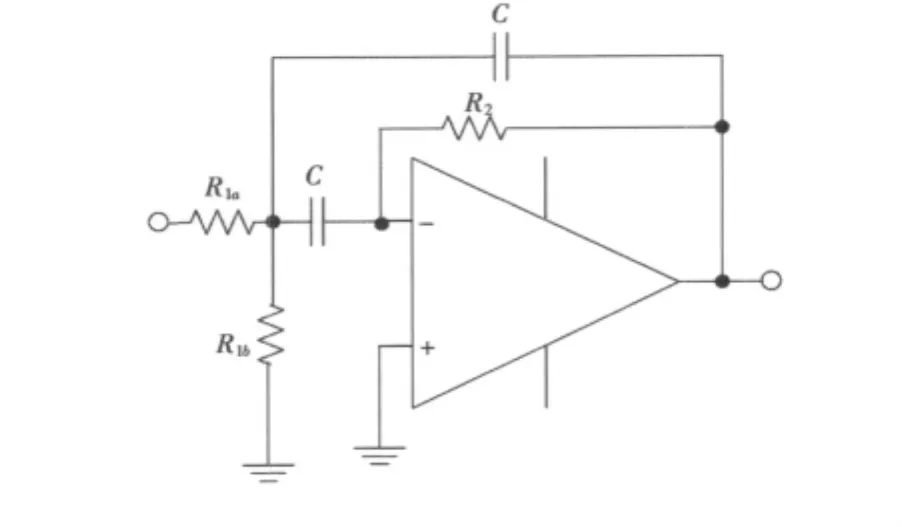
图3 多重反馈电路结构Fig.3 The structure of multiple reactive circuit
图中R1b和R2为数字电位器,此滤波器特点是电路简单,元件数量少,容差的灵敏度低。中心频率和滤波器品质因数Q可调,Q值受放大器的增益限制[4],它的传递函数为:

式中:R1为R1a和R1b并联的总电阻。
而每个全级点带通节的二级标准传递函数为:
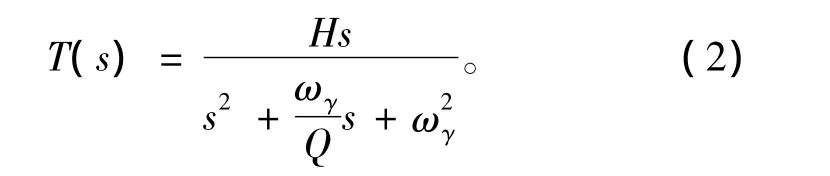
式中:ωr等于2πfr,即极点谐振频率;H为增益常数。通过式(1)和式(2)得到

2.2 混频器设计
混频技术在高频电子电路中应用非常广泛,在现有的集成电路中大多数应用于高频、甚高频信号处理,在低频、甚低频时不能通用。一般低频混频可通过采用模拟开关或运放配合适当的电阻、电容来实现,并在后端加低通滤波器来获得有用信号。这种方法电路实现简单,但同时其效果也差强人意,如果要达到较为理想的效果,则需要在混频后接入较高性能的低频带通滤波器,给电路设计带来不便。
为了更好地解决低频混频问题,在本设备设计中,混频器主体由三极管电路构成,在基极上施加输入信号,发射极施加本振信号,集电极输出接1个互感线圈。本振信号由直接频率合成器电路产生,输入到三极管的发射极。集电极和电源之间有一电感和电容构成谐振电路(频率为1.5 K)通过互感线圈输出,以得到我们所需的音频信号。
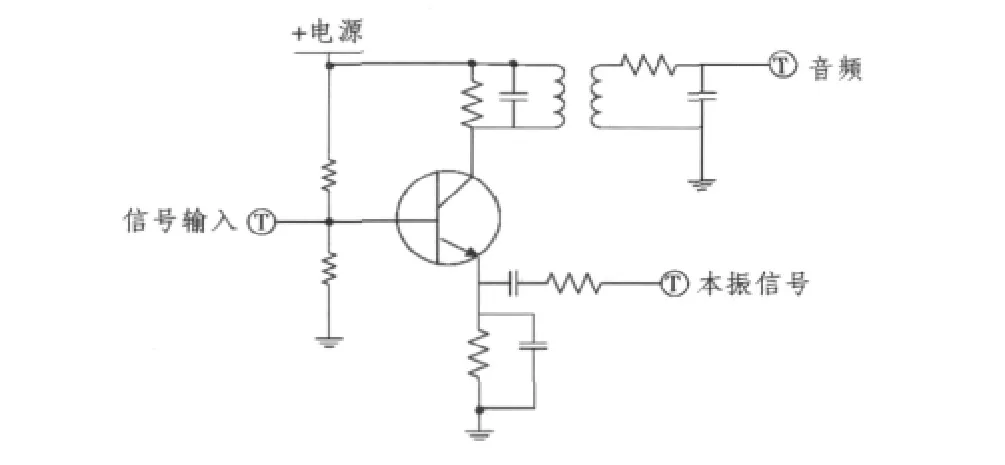
图4 混频原理Fig.4 The mixing principle
本振信号为混频器的输入之一,需要根据用户选择的目标声源的频率变化输出相应频率的正弦信号。目标频率范围5~80 kHz,以0.1 kHz为最小分辨率,如此高的分辨率以及需要输出的本振数量直接利用控制器件分频是无法实现的。在本设备中,采用了直接数字频率合成器(DDS)芯片AD9832。该芯片具有超高速的频率转换时间,极高的频率分辨率和较低的相位噪声,在频率改变与调频时,DDS器件能保持相位的连续,因此很容易实现频率、相位和幅度调制,并且可编程控制。AD9832芯片的控制时序如图5所示。
可通过对AD9832器件的SCLK,SDATA,FSYNC等管脚的控制,根据输出的本振频率写入相应的数据SDATA至内部寄存器。输出频率通过Fout=FREG*FMCLK/232计算得到,其中,MCLK为数字时钟输入端,FREG为写入频率寄存FREG中的数值。
2.3 音频功率放大单元
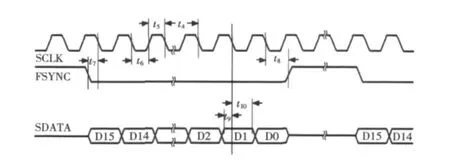
图5 AD9832控制时序Fig.5 The control timing of AD9832
音频功率放大单元以音频功率放大器芯片LM386为主体,该系统具有自身功耗低、电压增益可调整、电源电压范围大、外接元件少和总谐波失真小等优点。电路的工作原理如图6所示。
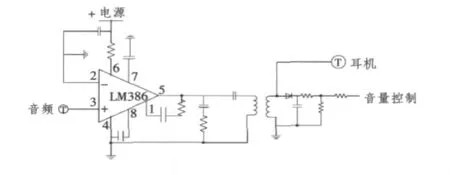
图6 功率放大电路原理Fig.6 The principle of the power amplifier circuit
由于在交流通路中LM386芯片内部的1个晶体管发射极近似为地,电路的放大倍数可以通过外部电阻灵活调整,电路的放大倍数的调整范围为20~200,增益约为26~46 dB。在实际电路中,在引脚1和8(或者1和5)外接电阻时,只改变交流通路,所以必须在外接电阻回路中串联1个大容量电容。
2.4 控制单元设计
控制单元主要完成的功能如下:
1)监测面板频率选择控制机械编码器的变化,根据判断结果,控制混频电路的2个数字电位器、AD9832的正弦波本振输出,以及面板的LCD上显示用户当前选择搜索的目标频率;
2)监测面板增益选择控制的机械编码器的变化,根据判别结果,控制数字电位器输出。
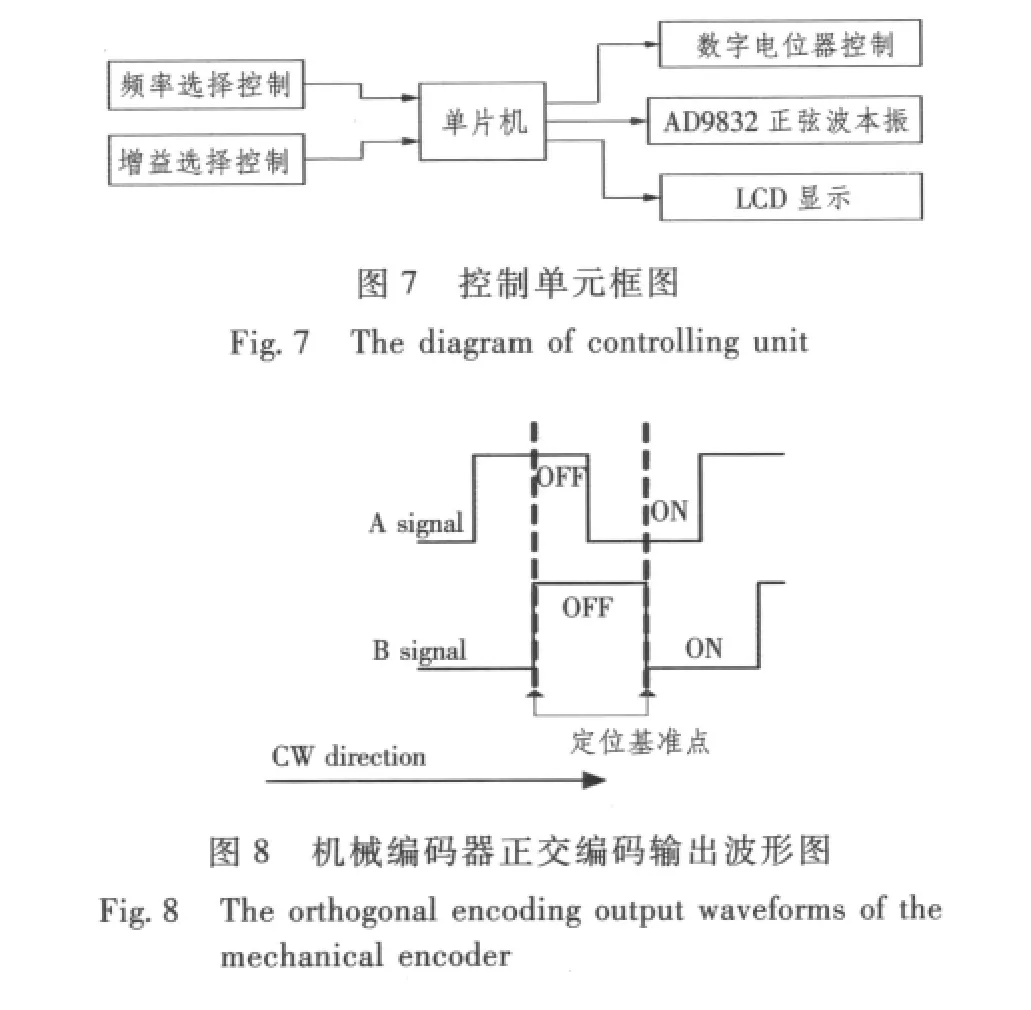
考虑到系统电池供电,选择了低功耗的MSP430单片机,控制单元框图如图7所示。
探测搜索频率控制和增益选择控制通过操作面板上的2个机械编码器来完成,机械编码器的输出为2路相位差90°的正交脉冲信号,波形如图8所示。根据2路正交脉冲信号之间相位的超前与滞后关系,可以有效地对正交信号进行辨向和细分。机械编码器可360°旋转,单片机根据触发程序中断的机械编码器输出端子判断旋转方向,确定频率、增益的加减,根据触发中断的次数确定加减的数值。控制单元程序流程如图9(a)所示,主程序流程图如图9(b)所示。
3 结语
本设备样机在海上进行了相关性能测试试验,测试人员利用摩托小艇,搜寻目标选择为国际通用民航黑匣子水声信标,布放于水下。声信标发出的信号为频率为37.5 kHz,周期1 s,宽度为10 ms的CW脉冲信号,搜索距离可达到2 km。
本设备采用电池供电,通过水密设计可整体在水下使用。设备功耗低、体积小,对操作平台要求较少,可应用于小艇探测、指导潜水员水下手持作业等多种场合,也可通过安装适宜的支杆在水面辅船使用。
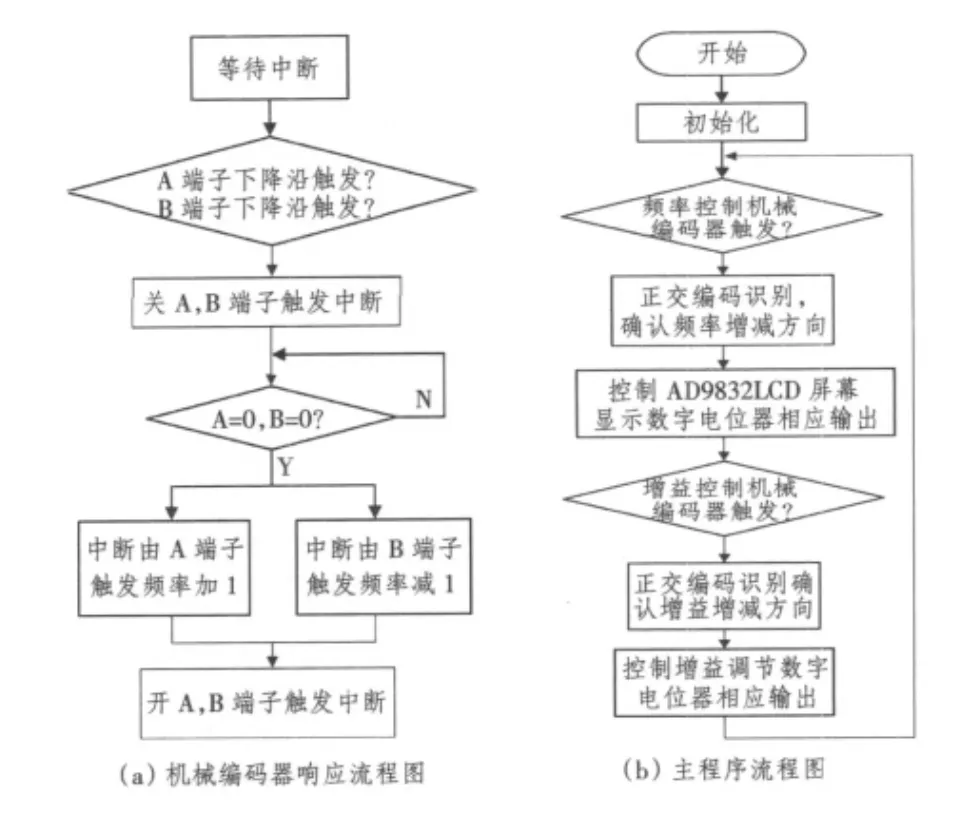
图9 控制单元程序流程图Fig.9 The flow chart of controlling unit program
[1]孙树民,李悦.浅谈水下定位技术的发展[J].广东造船,2006,(4):19 -24.
[2]孙贵青,李启虎.声矢量传感器研究进展[J].声学学报,2004,29(6):481 -490.SUW Gui-qing,LI Qi-hu.Progress of study on acoustic vector sensor[J].Acta Acustica,2004,29(6):481 -490.
[3]喻敏.长程超短基线定位系统研制[D].哈尔滨:哈尔滨工程大学,2006.
[4]阿瑟.B.威廉斯.电子滤波器设计手册[M].喻春轩,等译.北京:电子工业出版社,1986.177-180.
[5]沈建华,杨艳琴,翟骁曙.MSP430系列16位超低功耗单片机原理与应用[M].北京:清华大学出版社,2004.
[6]秦龙.MSP430单片机C语言应用程序设计实例精讲[M].北京:电子工业出版社,2005.
The design and implementation in portable underwater acoustic beacon detection and orientation equipment
QV Jia-sheng YANG Song
(The 760 Research Institute of CSIC,Dalian 110613,China)
Aiming at the defect which the underwater search orientation system based on acoustic array requires use the big ship and helicopter.This report introduces the design and realization of the underwater detective search instrument which is simple,portable,high efficient.The use of directional hydrophone and mixing methods,the underwater acoustic beacon signal required for detection and orientation is output for the audio format.It utilizes the space gain of directional hydrophone which is higher than the common one and the strong ability that human distinguish from signal.It improves the detectability of weak signal in the complex condition of sea.The report expatiates on the composition,operation principle and the designing method of the primary unit of the instrument,gives the experiment result on the sea for the swatch instrument,and explains the available situation of the instrument.
underwater acoustic detect;mixing;band filter;orthogonal encoding.
TB566
A
1672-7649(2012)04-0075-04
10.3404/j.issn.1672-7649.2012.04.017
2011-07-26;
2011-08-03
曲加圣(1980-),男,工程师,主要从事水声信号处理及工程应用方面的研究。
