无人机在电力系统中的应用及发展方向
2012-07-09刘国嵩贾继强
刘国嵩,贾继强
(中国科学院 长春光学精密机械与物理研究所,长春130033)
随着我国国民经济的快速发展,对电力能源的需求日益旺盛,与之相应的电力工程建设的力度也在不断加强。2011年1月15日中国前国家能源局局长张宝国发言表示,中国电网规模已经超过美国,居世界第一。我国目前已经建成东北、华北、华中、华东、西北和南方共六个跨省区电网,其中110千伏以上输电线路超过51.4万千米,而500千伏输电线路已成为各大电网的主力。由于我国国土辽阔,地形复杂,平原少、丘陵及山区较多,气象条件复杂,对于特高压和跨区电网等大型工程的初期规划建设,到建成后的日常巡查维护,现有的常规测试和检查手段已不能满足其快速高效的要求。而随着自动控制技术、GPS导航技术、航空遥感测绘技术及无线通信技术等的发展,无人机的使用已从军事领域拓展到许多民用领域,如地球物理探测、灾情监测、农作物监测。其中利用无人机航空遥感测绘能够高效完成电力建设规划及巡查任务[1]。
1 无人机各种电力应用
无人机测绘系统具备高灵活、快响应、低成本、实时等特点。与卫星遥感和普通航空遥感相比,尤其在低空获取光学图像、输电线路规划、厂(站)址地形图像获取,无人机测绘系统拥有不可代替的作用。同时,还在灾害应急响应方面具有重要作用。
1.1 输电线路规划
在各种类型电站输电线路走廊规划中,利用无人机测绘系统对规划区域进行详细的测绘,并高效地获得相应参考数据,可有效减小地面现场不利环境对勘测的不利影响。通过分析数据,考虑相关因素,各工程项目关系协调,充分利用有限的通道资源,使线路走向和区域规划更加合理。2011年5月18日,重庆电力设计院利用无人机测绘技术,仅用15天时间,完成了重庆220千伏张秀线的数字航空摄影任务。标志无人机航拍测绘技术首次运用于重庆电网输电路径优化设计工作中,优化了输电线路路径,节约了工程投资。
1.2 地形图测量
无人机测绘适用于小比例尺的地形图测量,成图比例尺一般小于12 000。但电网工程的可研设计阶段,可增加野外控制车的方法并利用野外测量数据优化航测高程信息等,从而获得1 1 000比例尺的地形图。为站址布置及优化提供影像、高程等详细的基础资料,减少测绘强度,提高规划效率。
2009年3月,中南电力设计院采用无人机低空摄影测量技术进行大比例尺测图实验,并于2010年设立《无人机低空摄影测量在电力工程中的应用研究》大型科研项目,对无人机低空摄影测量作业的流程、测量精度进行了研究。为了确保地形图的高程精度,提出采用高程面状拟合的办法对无人机低空摄影高程数据进行处理,以满足工程测量大比例尺用图的要求。通过江西某特高压变电站地形图测量项目的实践检验,证明该科研项目取得了良好的效果。图1为低空摄影测量作业的流程和江西某特高压变电站备选站址正射影像图。

图1 低空摄影测量作业流程和江西某特高压变电站备选站址正射影像图
1.3 在常规线路巡查上的应用
巡线维护现代化的重要性越来越得到国内电力专家的重视。实际上,欧美各国在上世纪50年代开始研究并使用直升机完成巡线、带电作业和线路施工[2],最早利用无人直升机巡线的是英国威尔士大学和英国EA电力咨询公司[3]。而我国从20世纪80年代开始研究利用直升机巡线的技术。
线路巡查是一项检测目标多样、分散、检测难度大的任务,表1对其主要检测目标进行了统计。

表1 线路巡查检测目标统计表
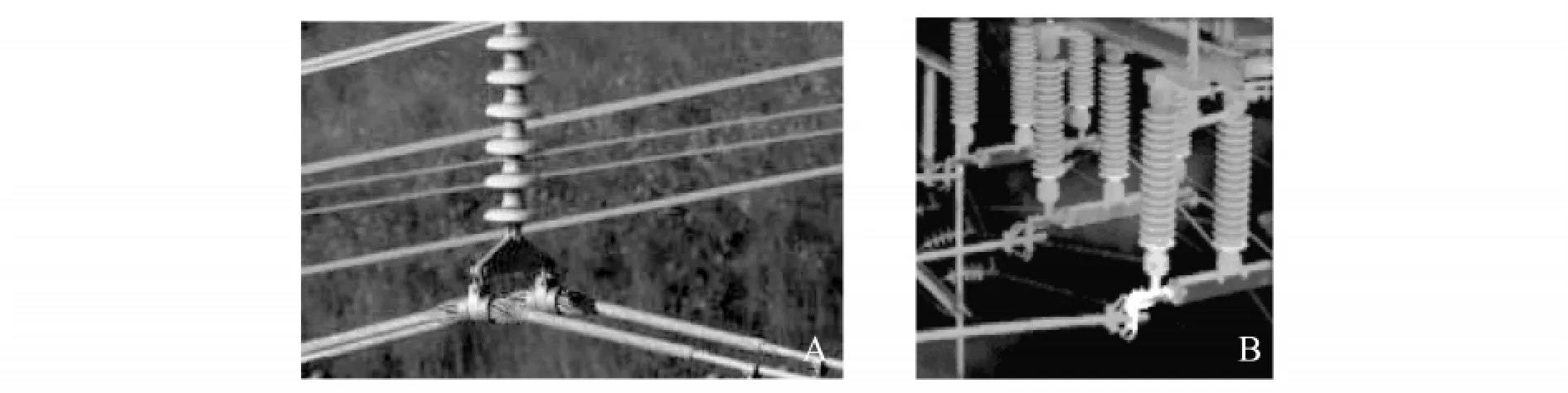
图2 导线接头可见光(A)和红外照片(B)
从可见光照片图2(A)中,可以清楚地观察输电设备的外观情况,并可以判断检测目标是否存在物理缺陷:导线是否出现断股、紧固件是否出现松脱、绝缘子是否有破损或污秽、防震锤是否异常等设备缺陷。从红外光照片图2(B)中,可以观察设备是否存在热缺陷:线路、接头、线夹、耐张管、接线管、绝缘子等部位是否存在由缺陷所导致的发热点。由于主干输电网都设立在野外,植物也可以影响其正常工作。2003年,美国和加拿大的输电网由于树木引起故障造成供电中断事故[4]。澳大利亚的科研工作者进行了相关的研究,他们使用无人机对电网附近的高大树木进行观察,通过不同的图片处理算法算出树木和电路之间的位置关系,判断是否会产生不利影响[6]。图3为他们获得的图像及其经过不同算法处理后的效果。

图3 澳大利亚科研工作者通过无人机获取的输电网及其处理照片
1.4 灾难应急响应
近几年,我国经受了洪涝、高温和严寒等极端天气的考验,由此引起的洪水、泥石流、冰冻等自然灾害对当地的电力基础设施造成了非常不利的影响,及时对这些设施的实际工作情况进行检测显得尤为重要。
2011年初,我国南方遭遇了罕见的冰冻灾害,很多基础电力设施遭到破坏。为了快速获得第一手的资料,湖南电力公司试研院和国家电网公司输变电设备防冰减灾技术重点实验室派出四旋翼无人机技术小组,在湖南电网建设公司的配合下,对江城线1724号耐张塔进行了高空近距离观冰,图4是四旋翼无人机及其拍摄的冰冻照片。该杆塔是历年覆冰最严重的杆塔之一,由于冬季长期大雾笼罩,对线路的覆冰观测极为困难。四旋翼无人机是一种能够垂直起降、无人驾驶自动飞行系统,适用于杆塔等定点目标的低空近距离观察和拍摄,能在高寒大雾等恶劣天气中进行飞行,完成线路覆冰观测任务。整机重量(包括摄像机)只有980克,使用充电电池(充电时间仅2分钟),飞行高度达600米,一次飞行滞空时间半个小时以上,具有非常好的飞行稳定性和灵活性。
2011年7月,辽宁省抚顺地区普降暴雨,派抢修队伍前往现场,因交通受阻无法进一步执行故障排查和电力抢修任务。工作人员启用辽宁电力信息系统并配合无人驾驶勘查飞机共同完成此次电力设施事故排查抢修作业。该系统是基于大型三维空间信息平台EV-Globe开发,以自主采集0.5米全辽宁高清影像数据为基础,配以高精度DEM数据、影像、三维电力设施数据、CAD数据、动态GPS数据完全一体化集成系统。图5所示为基于EV-Globe平台的三维电网模拟图。这是该三维电力系统首次进行山区大范围长距离搜索抢险工作,达到了良好的效果。

图4 四旋翼无人机执行任务及其拍摄的电力设施覆冰照片
1.5 线路架设
无人机系统配装相应的引线装置,还能执行高空架线的任务。2011年3月由辽宁公司与中国科学院沈阳自动化研究所联合研制的旋翼无人机自动架线系统,完成了本溪220千伏程富线输电线路初级导引绳任务。这是辽宁公司输电线路旋翼无人机智能巡检系统首次实际应用在架线作业中,并在架线过程中实现单次连续牵引1 150米初级导引绳过塔,完成多座杆塔的初级导引绳牵引架设,连续跨越3条10千伏线路和河流,成功地将初级导引绳连续布放在铁塔的横担上。

图5 基于EV-Globe平台的三维电网模拟图
完成架线任务的是博翔-3型旋翼无人机,总长3.8米,最大起飞重量120公斤,最大有效载荷30公斤,续航能力1小时,作业半径20千米(以地面站为中心),该机可携带载荷在5级以下风力安全飞行。
2 发展方向
现有的民用无人机测量系统具有如下缺点:(1)相机内方位元素的稳定性不高,影响测量精度;(2)相机镜头畸变大,对摄影测量精度产生不利影响;(3)相机CCD尺寸小,造成相机的收容宽度有限,增加了无人机的测绘工作量;(4)无人机任务载荷功能单一,多为只具有单一的可见光或红外摄影能力。为此,今后民用无人机测量系统发展方向应该为[7]:(1)测量相机专业化,即使用内方位元素稳定,镜头畸变小的专业测绘相机;(2)相机配备大面阵CCD,使得无人机的工作效能得到提高;(3)无人机任务载荷多样化,可以同时装备可见光和红外相机,或者其它如激光测距等新型测量装备,以适应不同的测绘要求;(4)相机可同时进行可见光和红外等不同波长的摄影测量功能,以提高无人机系统的工作效能;(5)相机应具备变焦功能,当发现可疑目标时,可对其进行凝视观察,可以提高巡线时对故障目标的识别能力。
随着无人机及航空测量技术的不断进步,以及我国电力事业的迅猛发展,无人机测量系统必将发挥出更大作用。
[1]郑小兵,郑彦春.无人机摄影测量技术用于电力勘测工程的探索和设想[J].电力勘测设计.2009,12(6):22-24.
[2]I.Ituen,G.Sohn,and A.Jenkins.A case study:workflowlanalysis of powerline systems for risk management[J].The Imernation Archives of the Photogrammetry,Remote Sensingand Spatial.Information Sciences,2008,37(3):331-336.
[3]D.I.Jones and G.K.Earp,Camera sightline pointing require-ments for aerial inspection of over head power lines[J].Electric Power Systems Research,2001,57(2):73-82.
[4]Appelt P.J.,Goodfellow J.W.Research on how trees cause interruptions-applications to vegetation management[J].IEEE RuralElectric Power Conference.2004(23/24/25):1-10.
[5]Zhengrong Li.Towards automatic power line detection for a UAV surveillancesystem using pulse coupled neural filter and an improvedHough transform[J].Machine Vision and Applica-tions ,2010,21(5):677-686.
[6]张福民,曲兴华,叶声华.大尺寸测量中多传感器的融合[J].光学精密工程,2008,16(7):1236-1240.
