要地防空指挥控制系统设计
2012-07-09王昌金张永辉
王昌金,张永辉,黄 彬
( 海军航空工程学院 a.兵器科学与技术系;b.研究生管理大队,山东 烟台 264001)
近代战争表明,空袭与防空不仅是攻防作战的先导,而且很大程度上主宰着战争的发展,贯穿于整个战争的全过程。现代空袭能对敌方实施“非”接触式纵深打击,迅速达成战争目的。随着技术的发展,现代空袭作战呈现出许多新特点[1]:①空袭兵器多样化。空袭兵器从单一的飞机演变为飞机类、飞航导弹类和战术弹道导弹类等多种武器装备,具有快速的机动力和强大的攻击力。②空袭体系更加完善。现代空袭是有计划的,事先协调的,空袭兵器通过统一集中指挥,能按照约定的时空关系实施大规模对地( 水) 面目标的空中攻击。③预警时间短。空中目标速度越来越快,隐身飞机的隐身技术越来越高,巡航导弹的飞行高度越来越低,使发现目标的相对距离越来越近,预警和作战准备时间越来越短。④防空理论和作战样式发生变化,出现了信息防空观、空天一体观、联合防空观等新的防空观念,防空作战效能的发挥不仅取决于防空武器系统的作战能力,而且还取决于防空武器系统的协同作战能力及整个防空体系的共同作用。
海军要地作为海军主要兵力的驻屯地域以及海上重要战略、战役方向的支撑点,在海军战略甚至国家战略中所处的地位越来越高。在未来战争中,海军要地必将成为敌空袭的重点对象[2],因此,必须加强海军要地的防空建设,保护祖国的门户。为适应未来防空体系对抗作战的需要,在海军要地部署先进防空武器系统的同时,必须建立具有协同作战、快速反应和抗毁能力强的指挥控制系统,将各防空武器系统进行优化组合、统筹安排、合理使用,以形成统一有效的防空体系,提高作战指挥效率、综合发挥各种防空作战武器系统的效能,增强海军要地的防空能力。
1 海军要地防空指挥控制系统需求
海军要地防空作战指挥控制过程为:接收上级指挥所和所属多个雷达站的空中预警情报,对各情报源数据进行融合处理;进行目标识别和威胁判断;根据各火力单元部署位置、兵器战技指标及射击准备状况,进行目标分配; 下达射击决心;监督各火力单元射击和判断射击效果[3]。拥有一体化指挥控制系统,是打赢未来信息化条件下防空战争的客观要求。指挥控制系统建设是1 项涉及范围广、相关因素多、内部关系复杂的系统工程。只有坚持系统“一体化”建设原则,采用“分布式”系统结构形式,使系统具备强大的全维信息融合能力、多级辅助决策能力、灵活协调控制能力和整体信息对抗能力等,才能获得指挥控制系统建设的最佳效能,保障未来信息化条件下防空体系作战指挥的高效和稳定[4]。海军要地防空指挥所对指挥控制系统的作战能力需求有以下几方面。
1.1 全维信息融合能力
未来防空作战,战场空间向多领域延伸,呈现立体化、多层次化,是陆、海、空、天高度一体化的多维综合战场,并且战场信息呈现密集化,指挥信息贯穿指挥控制系统的各个领域。保证各业务领域的连通性,拥有信息优势将是未来防空作战取得胜利的关键。指挥控制系统作为指挥员与指挥环境发生联系的中介和桥梁,必须具备全维信息融合能力,最大限度地衰减情报信息的复杂性,放大决策信息对指挥对象的控制力,使决策这一作战指挥的核心职能达到科学高效。
1.2 多级辅助决策能力
未来防空作战中,作战发起突然、阶段转换迅速、样式更迭频繁,战场节奏加快,作战双方都将力求速战速决。从情报的获取、决策的制定到命令的下达及情况的反馈等各指挥环节无一不需要争分夺秒,时间的争夺必将贯穿于作战指挥的全过程。只有进行适时高效的决策,才能缩短指挥周期,抓住战机,在指挥对抗中始终比敌人快半拍,立于不败之地。以往的指挥结构往往是层次树状结构指挥体制,其优点是由上到下能实现高度集中统一指挥,缺点是指挥结构层次多,在实战中极易造成“断其一点,影响一片”,以致整个作战指挥系统出现瘫痪的局面。在信息作战条件下,随着指挥控制系统的日益完善,横向技术一体化的采用,分层、线式指挥体系将被纵横联通的网络体系所取代。此种结构的特征为外形扁平、横向联通、纵横一体。外形要求扁平,减少指挥层次,缩短信息流程,充分发挥横向网络的作用。横向联通是指平级单位及各作战平台之间能直接沟通,实时交换信息。实现纵横一体的核心设备是计算机、指挥控制中心、网络节点及至单兵作战单元,从而使全方位的信息流动实现最优化、实时化。防空指挥控制系统只有具备了多级辅助决策能力,才能提高作战指挥的时效性,掌握并保持体系作战指挥上的主动权。
1.3 灵活协调控制能力
信息化条件下体系防空作战,各防空武器系统都有自己的优势领域,各防空武器系统之间既有一定的互补性,也有一定的独立性。战场空间范围广,涉及空中、水面和陆岸,作战行动样式多,袭击反袭击、机动反机动、封锁反封锁等不同性质、不同样式的行动将在不同空间相互交错进行,使作战任务和作战地理环境变化迅速,必须根据不同作战阶段、不同作战时节的具体情况,对某些兵力和行动采取“分散式”指挥或“委托式”指挥方式,并明确指挥关系及其转换的时机和方法等,使指挥关系呈现多样化。战场控制的“实时和有序”向拥有一体化指挥控制系统的一方倾斜,灵活协调控制能力是指挥控制系统必须具备的1 项能力。系统中通信网、计算机网、指挥控制网系统和情报系统等形成分布式、多层次和开放性的网络体系,构成信息在数量、质量、时效、层次上的最佳组合。分布式体系结构是指在地理或空间上分散、相互用多手段多路由联通的、功能上能互相替代和补充的系统结构形式。各防空武器系统之间通过指挥控制系统,把分散部署或远离战场的平台凝聚起来,做到形散神聚、点面结合,在需要的时机实施快速有效的兵力机动或火力机动,对既定目标发动精确攻击。
1.4 整体信息对抗能力
信息化条件下的体系作战,是系统对系统、体系对体系的对抗。没有制信息权,就没有制空权、制海权,亦会丧失战场的主动权,“制信息权”的斗争贯穿始终。在激烈、复杂的指挥对抗环境中,摧毁对方指挥控制系统或压制其指挥效能的发挥,使其不能做出及时、准确的反应,成为夺取作战胜利的重要保证。指挥控制系统将面临敌方“硬摧毁”和“软打击”的严重威胁。未来防空作战,谁能在以电子战为主的信息作战中取得主动权,就能为取得兵力机动和火力打击的主动权提供强有力的保障,这就要求指挥控制系统必须具备整体信息对抗能力。
2 要地防空指挥控制系统的体系结构
体系结构是1 个系统的基本框架,他规定了系统的组成原则、组成部分以及各部分之间的关系和实现这些关系的方式[5]。体系结构支持系统全生命周期内的活动,有助于系统从最初的概念直到最后退役的开发、运用和维护,是复杂大系统设计中不可缺少的内容。美军先后颁布了C4ISR 体系结构框架和DOD 体系结构框架[6],以指导体系结构的设计。美国的George Marson 大学信息工程学院C4I 体系结构研究中心的高级工程师安德鲁·P·塞奇博士把C4I 体系结构定义为3 层,即功能结构层、物理结构层和逻辑结构层[7]。下面围绕要地防空指挥控制系统的功能结构、物理结构和逻辑结构进行设计。
2.1 功能结构
系统的功能结构描述系统需要实现的功能及其相互关系。要地防空指挥控制系统是整个要地防空体系的枢纽,其基本任务是对所属防空导弹武器系统实施指挥、控制,调整下属指挥控制系统的活动,与其他部队联络,获取大范围防空警戒信息,评定火力群的作战态势,确定部队的状态,提供目标指示、分配和下达射击任务[8]。其基本功能就是实现信息采集、数据传递和处理自动化,为相应的指挥机构提供准确、实时、完整的态势信息,辅助指挥员进行科学决策,保障指挥机构对部队和防空武器系统实施高效指挥。系统主要由信息获取分系统、信息处理分系统、辅助指挥决策分系统、武器控制分系统以及各分系统之间的信息传输分系统组成。要地防空指挥控制系统的功能结构如图1 所示。
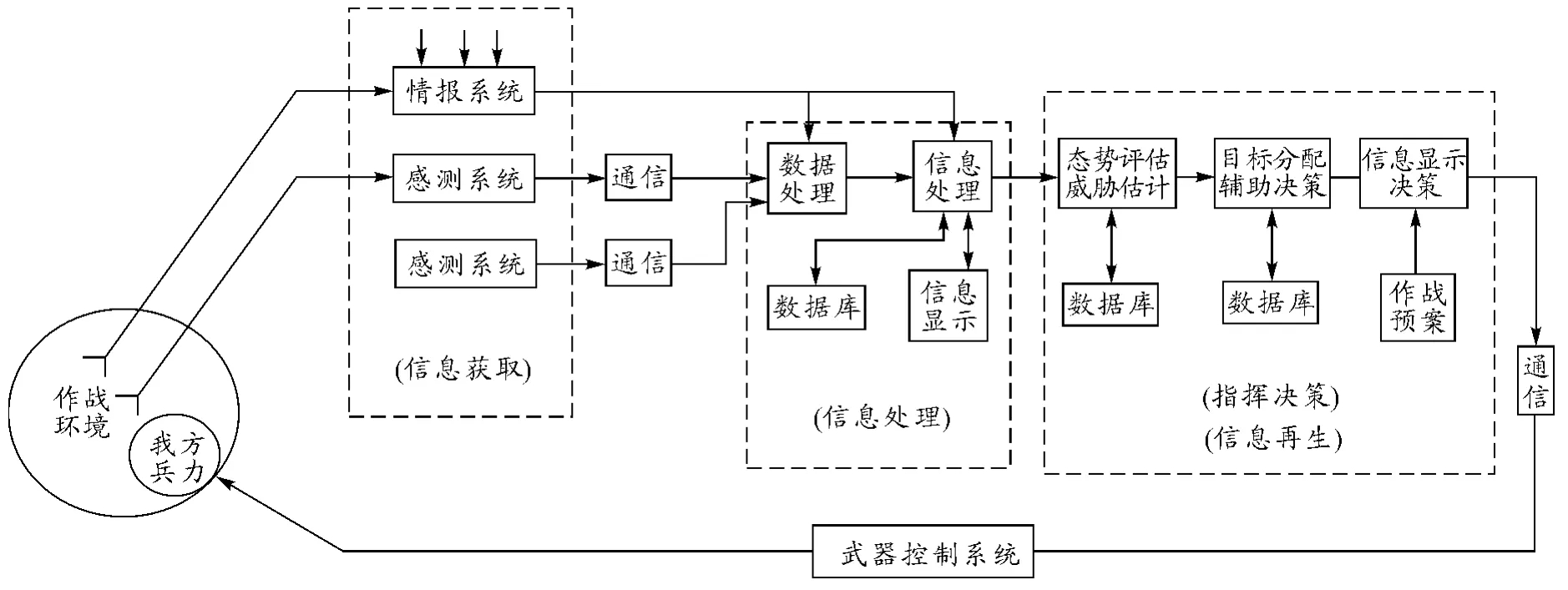
图1 要地防空指挥控制系统功能结构
2.2 物理结构
物理结构确定该系统的物理实体、分配布置及其物理连接结构。
为适应复杂、残酷的空防对抗环境,防空指挥控制系统体系结构必须采用分布式体系结构,并且具备中心节点转移能力,以提高抗毁能力和作战的灵活性。要地防空指挥控制系统的指挥体系采用“旅-营”2 级指挥体制,利于构建分布式结构。要地防空分布式指挥控制系统的物理结构如图2所示,即将要地防空体系中的旅指挥所、目标指示雷达以及防空武器系统火力单元的指挥控制系统、制导雷达、目标指示雷达等形成1 个个节点,利用通信网络将各节点相互连接,形成1 个功能上分布、资源上共享的指挥控制网络,指挥所根据从预警雷达获得的敌军空袭情报以及要地火力单元的状态信息,指挥控制适当的防空武器系统在适当的时机拦截空袭目标。
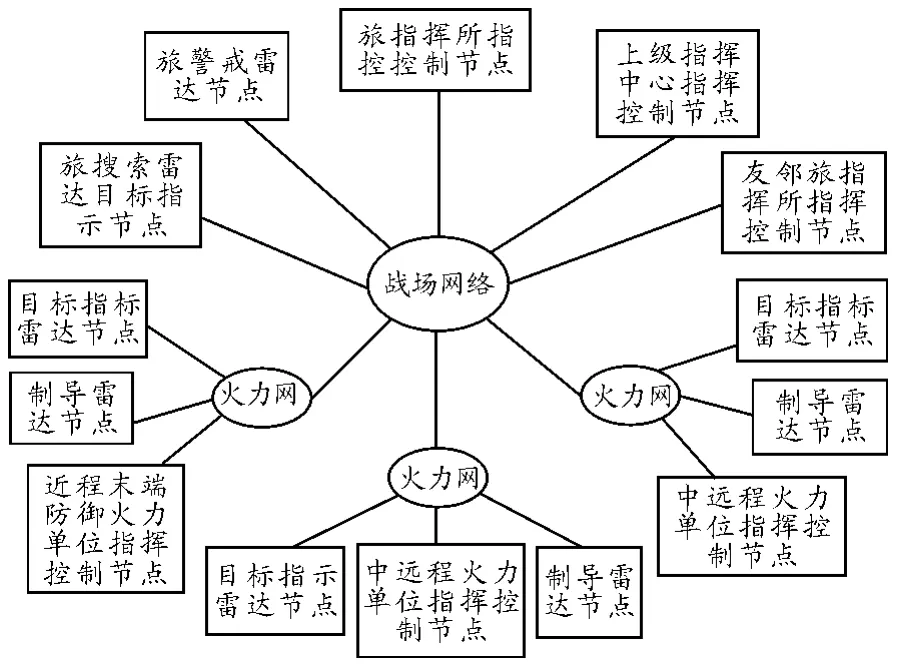
图2 要地防空指挥控制系统物理结构
2.3 逻辑结构
系统的逻辑结构是对整个系统从思想的分类,把系统分成若干个逻辑单元,分别实现自己的功能。
要地防空指挥控制系统主要采用3 层逻辑网结构,即探测制导网、指挥控制网和火力拦截网。3 层网络通过通信网络的连接,紧密耦合形成防空指挥控制系统的逻辑结构。探测制导网由多功能制导雷达( 通常为相控阵雷达) 组成。指挥控制网由各级指挥控制中心组成,对分布在不同地域的发射节点和跟踪制导节点进行指挥控制。火力拦截网由作战区域内不同功能、不同性能、不同成本的导弹武器系统、弹炮结合武器系统和各种信息对抗装备组成,是要地防空体系的直接作战终端。要地防空指挥控制系统的逻辑结构如图3所示。
3 系统功能设计
要地防空指挥控制系统是要地防空体系的核心,负责整个信息系统的数据处理、显示控制、辅助决策和作战指挥,实现对战场从上到下不间断、无缝隙、适时高效的指挥控制,主要用于快速、准确、全面收集和处理信息,适时准确地分发信息,为指挥员提供辅助决策,以提高部队的快速反应能力和整体作战效能[9]。从整体来看,要地防空指挥控制系统的功能可大致归结如下。

图3 要地防空指挥控制系统的逻辑结构
1) 预警探测。预警探测可获得所属预警雷达站提供的雷达空情、作战单元提供的火控空情、观察哨提供的侦察信息和战区通报的空情信息4 类空域的动态情报。
2) 空情综合处理。系统自动获取多批次雷达网内外空情信息后,在转换到统一地心直角坐标系基础上,以自动或人工干预的半自动方式,进行航迹相关和目标属性判断、自动编批、选取上报指挥所等情报综合处理,形成高质量综合空情数据。
3) 目标识别。能以清晰、明确的方式对敌我空中目标进行识别判断,并建立准确的空中态势。
4) 威胁评估。根据目标类型、属性、位置、可能攻击要地的重要程度,以及我方武器配置、状态等因素,对所有空袭目标的威胁程度进行评估。
5) 决策支持。系统能辅助生成作战预案,能进行兵力区分、目标分配、火力协调、作战部署等辅助决策,满足突发事件和应急业务处理的需求。
6) 作战指挥。包括威胁警告、战场数据处理、决策与指挥、作战资源管理、指挥引导( 与武器系统交链) 与监视、作战效果评估与反馈等。
7) 记录、重演。系统能模拟、复现防空作战过程,提供模拟训练功能,保障部队平时训练,模拟训练产生的数据、报文、话音等应与作战数据自动区分、存储、调阅。
4 系统防空信息流
在防空作战中,每个指挥控制节点既具有战术单位和作战单元指控系统( 以下简称指控中心节点) 功能,又具有火力单元指控系统( 以下简称本地指控节点) 功能。网络化防空作战过程由当前指定的指控中心节点进行统一指挥;当指控中心节点出现故障或被毁时,按照战前确定的替代准则,由其他某个本地指控节点行使指挥中心节点功能。根据当前指控中心节点确定的网络化作战样式,通过对各探测制导系统进行动态组合和资源合理调度,形成相应的探测制导网络,提高对目标的探测跟踪质量,扩大跟踪覆盖范围。当前指控中心节点根据战场态势和体系内资源可用情况等,适时形成若干个由本地指控节点、探测制导网、发射装置和拦截导弹组成的动态作战组合。
系统防空作战信息流程如图4 所示,典型防空作战过程可描述如下。
图4 系统防空作战信息流程
1) 预警系统及目标指示雷达发现目标后,通过信息接口输入各指控节点;每个指控节点均按照统一算法进行分布式信息融合( 包括状态融合和属性融合) ,形成统一信息场。
2) 当前指控中心节点根据统一信息场提供的目标空域分布特性和种类,确定当前采用的网络化作战样式,适时组成探测制导网络。
3) 当前指控中心节点根据统一的空情态势,实时进行威胁判断与排序,拦截适宜性检查,并根据各种作战资源当前可用状态实时形成作战组合。
4) 本地指控节点计算发射诸元,进行发射决策。
5) 在给定的发射时间内,发射防空导弹。
6) 防空导弹飞行过程中,当前作战组合中的探测制导网截获跟踪导弹;按该探测制导网提供的目标信息形成制导指令,修正防空导弹的弹道。
7) 指控中心节点实时监控拦截过程,判断杀伤效果。8) 若目标全部被拦截,或目标已返航,或防空系统失去作战能力,则停止。
9) 若还有未杀伤目标重新进入指控中心节点目标队列,则返回2) 。
5 需要解决的关键技术
5.1 空情综合技术
空情综合是防空指挥控制系统的支撑技术。空情综合的准确性、可靠性是进行目标校对、目标分配等指挥控制的基础[10]。由于目前战场环境复杂,单一的雷达已不能满足空情保障的需要,需要运用组网技术,根据作战任务,进行多雷达组网,获取更准确的空情信息。由于雷达精度不同、体制不同、探测距离误差、复杂空情等的影响,导致目标航迹不一致或不连续平滑,必须进行空情综合。空情综合技术是利用计算理论和方法,将网内每个雷达测量得到的目标航迹,传送到组网数据处理中心进行互联、相关、估计等处理,得到融合后的航迹,以便获得准确的目标状态、及时的战场态势和威胁估计。
5.2 威胁判断、评估技术
目标威胁评估是指来袭目标对被保卫对象或导弹阵地威胁程度的预测,主要任务是查明或预测敌机可能攻击的目标,到达的时间,以及各批敌机的威胁程度,它是防空作战指挥控制过程中进行目标优化分配的主要依据之一[8,11]。对于网络化作战系统的威胁评估,决策的准则是空中目标对网络化作战系统( 或保卫要地) 的威胁程度。决定目标对导弹阵地的威胁因子主要有到达时间、航路捷径、飞行高度、电子干扰和目标类型等。威胁估计要考虑的因素很多,而且相互间的关系复杂,要全面合理地考虑各种因素,定出1 个威胁程度等级与各种因素的函数关系,困难很大。即使能定出这一标准,在实战中不少因素也往往不能确切知道,例如敌机是否带有核武器,攻击目标、作战任务不可能完全明确,即带有一定的模糊度( 灰度) 。有时在严重干扰情况下空中情况不可能完全查清,要解决这些问题还要用到其他数学方法( 如模糊数学、灰色系统) 建立更为复杂、严谨的数学模型。所以,利用计算进行威胁程度估计时,为提高判断的实时性,往往不得不忽略一些因素和采用一些简便的估计方法。通常使用的简便方法有到达时间判断法、相对距离判断法、相对方位判断法、线性加权求和法等。威胁评估的步骤如图5所示。
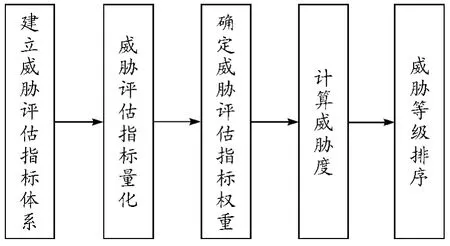
图5 威胁评估的步骤
5.3 目标分配辅助决策技术
目标分配辅助决策是防空指挥控制系统的核心[8-9],他将确定的作战指挥程序与目标分配原则在指挥控制系统中实现,形成以自动生成战斗方案并对武器系统实施指挥控制为主,人工干预为辅的战斗程序,他能在空防斗争激烈复杂的环境中,减少人工决策的差错,提高指挥效率。目标分配是为了充分发挥各火力单元的整体优势,将空中目标在给定的约束条件下分配到不同火力单元的一系列决策过程,它是一个动态的、多因素优化分析的决策过程。目标分配的重点主要集中在模型的构建和优化算法的研究上。在目标达到分配终线之前,对该目标的分配决策将一直进行,而且分配预案将随着目标飞行诸元参数、各火力单元的战技指标和射击准备状况进行动态调整[12]。要地防空体系由多个防空武器系统火力单元组成,火力单元之间存在杀伤区重叠区域,为了协调火力单元之间的防空作战,避免重复射击或漏射击,减少导弹消耗量,提高防空指挥效率和效能,研究目标分配辅助决策是十分必要的。
6 结束语
本文通过对要地防空指挥控制系统进行需求分析,构建了分布式指挥控制系统的功能结构、物理结构和逻辑结构,设计了系统应具备的功能,明确了防空作战信息流程,并研究了系统需要解决以及实现的关键技术。本文的研究对要地防空指挥控制系统的构建具有理论指导意义,可为要地防空体系实现网络化、一体化提供参考。同时如何将本文提出的分布式指挥控制系统应用于实践,相应的技术问题还需要进一步研究。分布式指挥控制系统建设的具体问题也有待在实践中逐步丰富和完善。
[1]李学焦,王建民.重点区域防空指挥自动化系统分析与研究[J].战术导弹技术,2002(4):38-43.
[2]严必虎,顾洪江,对海军要地多维一体防空作战体系建设的思考[J]. 防空兵指挥学院学报,2010,27(6):21-23.
[3]蒋为民.俄罗斯防空体系建设研究[M].北京:国防大学出版社,2002.
[4]张未平.指挥信息系统体系作战结构研究[M].北京:国防大学出版社,2011.
[5]刘昌云,刘进忙,张金成.分布式防空C3I 的体系结构研究[J].系统工程与电子技术,2003,25(1):27-30.
[6]罗雪山,罗爱民,张耀鸿,等.军事信息系统体系结构技术[M].北京:国防工业出版社,2010.
[7]刘曙阳,李双景.指挥中心体系结构[M].北京:军事科学出版社,1999.
[8]张多林,吕辉,王刚,等.防空指挥自动化指挥控制系统[M].西安:西北工业大学出版社,2006.
[9]陈瑞源.防空导弹武器指挥控制通信系统[M].北京:宇航出版社,1995.
[10]李旭东.陆军防空雷达组网与指挥控制系统的集成研究[J].现代雷达,2009,31(5):7-10.
[11]骆文辉,杨建军.灰色逼近理想解排序法在目标威胁评估中的应用[J]. 火力与指挥控制,2009,34( 2): 130-133.
[12]张杰勇,姚佩阳,王欣,等.基于时间约束的多平台协同目标分配算法[J].系统工程与电子技术,2011,33(6):1287-1292.
[13]高方君. 一种指挥控制系统中的目标优化分配方法[J].火力与指挥控制,2009(12):14-143.
