全柔性铰链平面并联微动机器人的静刚度性能分析
2012-07-05钟春华杨春辉
钟春华,杨春辉
(华东交通大学信息工程学院,江西南昌330013)
机器人指的是能自动执行工作的机器装置,一般由执行机构、驱动装置、监测装置和控制系统及复杂机械等组成。而全柔性铰链平面并联微动机构是靠材料的弹性变形来实现微位移的一种全新机构,此种机构在MEMS、微定位装置、微机电产品的加工和装配以及微外科手术等领域中具有广阔的应用前景[1-2]。微动机器人具有无摩擦、无间隙、响应快、结构紧凑、刚性好、误差积累小等特点,以柔性铰链代替传统铰链后并联机器人就正好具备以上特点适合用作微动机器人。全柔性并联微动机器人的终端执行器的定位精度具有很高的标准,而其静刚度在很大程度上决定着这一指标。早在20世纪90年代初,C.Gosselin对并联操作手刚度控制的基本操作参量进行了研究[3];I.Kao等给出了并联机构的守恒转换刚度矩阵[4];汪满新等应用雅可比矩阵法建立Tricept型4自由度混联机器人的静刚度半解析模型[5],杨启志等利用D-H矩阵变换的方法,推导出一般支链静刚度矩阵求解的理论过程,通过演算得到支链端部的静刚度矩阵[6],这几种方法计算过程复杂。我们根据Lagrange(拉格朗日)方程能量守恒定律推理出此机构线性静刚度方程,此方法不但简单,而且计算量较小,全柔性铰链平面并联微动机器人可看成静态工作,所推导的线性静刚度模型是行之有效的。最后应用ANSYS10.0软件进行有限元分析验证,发现刚度值比理论值大25%左右。因为解析运动学模型是伪刚性模型,而实际全柔性铰链微动机器人的运动学模型是非线性的。
1 解析建立运动学模型
图1为全柔性铰链平面并联微动机构模型,此机构的运动副为圆弧型柔性铰链,3个驱动器是压电陶瓷(PZT)。图2为该机构的伪刚性模型,其中Ai、Bi、Ci(i=1,2,3)为柔性关节,其结构具有对称性,动平台是一个等边三角形ΔC1C2C3,ΔL1、ΔL2、ΔL3分别是三驱动器产生的位移,作为机构的输入位移。在静平台上建立参考坐标系xoy,x轴方向通过机构初始位置的C1点,坐标原点o与动平台初始位置时的几何中心重合,动平台的参数变量为平台位置和方位角X=(ΔxΔyΔγ)T。这里Δx和Δy分别表示输出动平台沿x,y轴的位移变动量,Δγ为输出平台沿z轴的旋转角度变动量。
设θAi,θBi,θCi(i=1,2,3)是以x轴为起始边的对应铰链的初始角度,ΔθAi,ΔθBi,ΔθCi则表示各铰链的角度变化增量,其中ΔθAi为输入角度增量,如图2所示。

图1 3-RRR平面并联微动机构Fig.1 3-RRR planar parallel manipulators
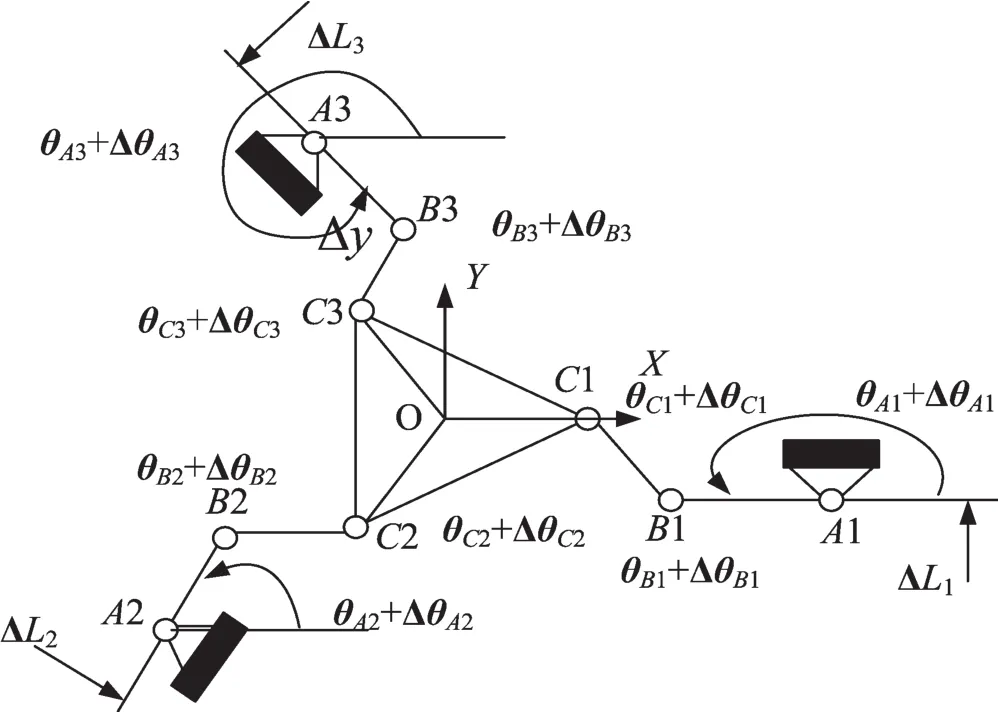
图2 伪刚性模型Fig.2 Pseudo rigid body model
根据文献[8]闭环矢量原理解析全柔性铰链并联微动机器人运动学方法,已知三驱动器产生ΔL1,ΔL2,ΔL3的位移时,可以通过闭环矢量6个方程式,并利用Matlab软件编程计算,就可得其6个未知数的解(即和与三驱动器输入位移的关系):

当已知 ΔL1,ΔL2,ΔL3,通过式(1),(2)及机构的支链就可求出动平台的参数X=(ΔxΔyΔγ)T:

3 理论静刚度
由于3-RRR是平面运动机构,可忽略构件重力的影响。由于微动机器人是在低速低频率下工作,速度和加速度非常小,所以3-RRR并联微动机器人可看成静态工作[4]。且全柔性铰链并联微动机器人的静刚度模型为

式中:F为3×1力矢量矩阵;K为是与驱动器位移ΔL关联的3×3刚度矩阵。
机构的弹性能量方程为

式中:Kr为单个柔性铰链转动刚度。
单个圆型柔性铰链的转动刚度公式为[7]

式中:E为材料的杨氏模量,GPa;b为柔性铰链的宽度,mm;r为柔性铰链的圆弧半径,mm;t为柔性铰链的厚度,mm。MZ为力钜,N;αZ为柔性铰链在MZ力矩下产生的角变形。

已知柔性铰链的参数E=130GPa,b=10mm,r=2.5mm,t=1mm,代入式(6)得Kr=50.28N·m·rad-1。将Kr与式(1),(2)代入式(5)得:

利用Lagrange方程解析出此机构的动力学模型为

该机构可看成静态工作,认为T=0。对式(7)分别ΔLi求导得

其中ΔLi单位为um。

将式(3)代入式(8)可得

4 有限元验证
利用有限元分析软件ANSYS10.0建立并联微动机器人的模型,如图3所示。我们选择单元3-D实体SOLID45,对整个模型使用Smartsize进行自由网格划分,对Mi面进行全约束,面为载荷的施加处。材料参数为E=130GPa,泊松比v=0.3。后置处理如下:倘若在动平台的中心方位设定一节点为o,定义节点C1,C2,并用ANSYS软件显示出节点o,C1,C2的x,y方向的位移,以及点的x,y方向的位移。
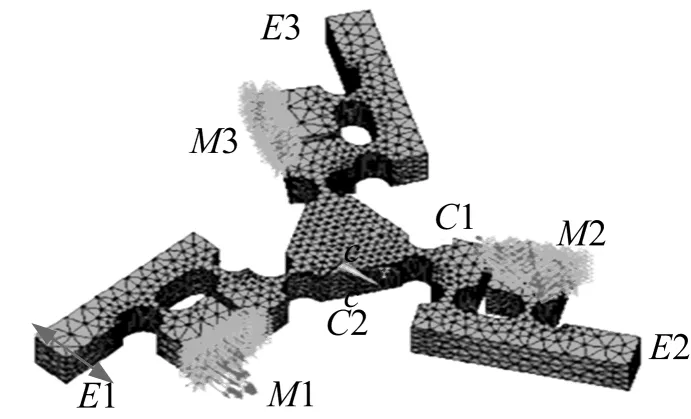
图3 有限元模型Fig.3 Finite element model of 3-RRR planar parallel manipulators
通过分析验证可以得出有限元线性刚度矩阵值如下:

由式(8)计算分析理论和有限元值比较,发现有限元分析的刚度值比理论值大25%左右。
5 结束语
以上对全柔性铰链平面并联微动机构(3-RRR)微动机器人建立解析运动学线性模型,并根据Lagrange能量守恒原理推出机构线性静刚度方程,通过ANSYS10.0软件对机构进行有限元验证,发现有限元刚度比理论值大25%左右。这是由于理论模型是伪刚性线性平面模型,而有限元为三维模型,并且实际微动机器人的运动模型并不完全是线性,而是非线性的,实际柔性铰链不仅会产生转动,还会产生伸长等运动,因而还需要进行实验修正。由于该机构是在低速低频率下工作,速度和加速度非常小,3-RRR并联微动机器人可看成静态工作,所以线性静刚度模型是行之有效的。
[1]于靖军,毕树生,宗光华,等.基于伪刚体模型法的全柔性机构位置分析[J].机械工程学报,2002,38(2):75-78.
[2]李永刚,宋轶民,冯志文.并联机器人机构静刚度研究现状与展望[J].机械设计,2010,27(3):1-4.
[3]GOSSELIN C.Stiffness mapping for parallel manipulators[J].IEEE Transactions on Robotics and Automation,1990,6(3):377-382..
[4]CHEN S F,KAO I.The conservative congruence trans-formation for joint and Cartesian stiffness matrices of robotic hands and fingers[J].The International Journal of Robotics Research,2000,19(9):835-847.
[5]汪满新,王攀峰,宋轶民,等.4自由度混联机器人静刚度分析[J].机械工程学报,2011,47(15):9-15.
[6]杨启志,马履中.全柔性并联机器人支链静刚度矩阵的建立[J].中国机械工程,2008,19(10):1156-1159.
[7]左行勇,刘晓明.三种形状柔性铰链转动刚度的计算与分析[J].仪器仪表学报,2006,27(12):1725-1728.
[8]杨春辉,刘平安.应用闭环矢量原理建立三自由度平面并联微动机器人运动学模型[J].机械科学与技术,2007,26(9):1233-1235.