基于运动方程长时间能量积累方法的实现
2012-07-05周成义毛五星涂晓东
周成义,毛五星,陆 军,涂晓东
(1.电子科技大学通信与信息工程学院,成都 611731;2.中国电子科学研究院,北京 100041;3.空军雷达学院,武汉 430019)
0 引言
基于运动方程下长时间能量积累方法不同于传统的长时间相参积累方法,它直接从相参积累的根本点——相位出发,将包含目标运动状态信息的回波信号相位与反映目标运动状态的运动方程综合起来,将目标运动方程转换为回波相位,利用匹配滤波理论进行相参积累。该方法需要雷达系统提供长时间目标回波,传统雷达系统向空间辐射窄波束,目标驻留时间在毫秒数量级,不具备该条件。最新发展的分布式阵列雷达采用大视场的宽波束对目标进行探测,目标驻留时间可达秒级,为该方法的应用创造了条件。因此,基于分布式阵列雷达体制,以基于运动方程下长时间能量积累方法为理论基础,提出了其具体实现途径,结合斜向匀速直线运动目标,给出了在该运动形式下系统各部分信号模型;其中,相位估计以搜索的方式进行。最后通过对匹配滤波后信号进行门限检测,实现目标检测,并通过匹配滤波响应信号的确定,确定目标运动参数,实现目标运动状态估计。
1 基于运动方程长时间能量积累方法信号处理流程及信号模型
基于运动方程长时间能量积累方法的信号处理框图,如图1所示。

图1 分布式阵列雷达信号处理框图
为减小系统处理时间间隔,系统每T秒对信号处理一次,信号存储结构示意图,如图2所示。

图2 信号存储部分结构示意图
系统以T秒为间隔,将每个存储单元存储的信号移至其前一存储单元,位于最前面的存储单元则将自己存储信号丢弃,并存储来自其后一个存储单元的回波信号,系统将存储单元信号作为整体进行匹配滤波等后续处理。其信号处理流程图,如图3所示,具体步骤如下。
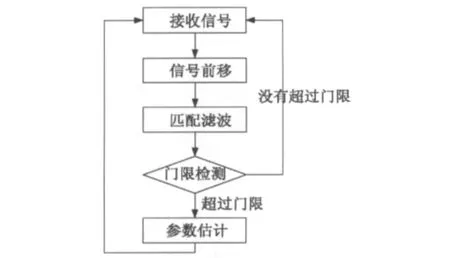
图3 信号处理流程图
(1)接收信号,接收系统将处理后的接收信号,以T秒为间隔,不断送入存储单元;
(2)信号前移,系统以T秒为间隔,将每个存储单元存储的信号前移至前一存储单元,位于最前面的存储单元则将自己存储信号丢弃,并存储来自其后一个存储单元的回波信号;
(3)匹配滤波,系统将存储信号作为整体进行匹配滤波;
(4)门限检测,将经匹配滤波处理后的信号进行门限判决;
(5)参数估计,若处理后信号超过门限,系统确定与回波信号匹配的匹配滤波器参数,通过该参数,估计目标运动参数,然后系统跳回步骤1,继续运行;
(6)当没有检测到峰值时,系统跳回步骤1,继续运行。
其中匹配滤波采用匹配滤波器组以搜索方式进行,示意图如图4所示。

图4 匹配滤波器组示意图
为便于分析,以单发单收单通道模式为例,给出系统各部分信号模型。系统发射单频连续波信号,载频为fc,发射信号为

式中,At为发射信号幅值。
设c为光速,载波波长为λ,R(t)为目标与雷达径向距离,回波时延τ=,发射信号与回波信号相位差φ(t)=,回波信号经接收及下变频处理后信号为

设存储信号总长度为TNs,TN=NT,存储信号形式为

式中,rect(t)为方波函数,满足

根据匹配滤波理论,匹配滤波响应信号h(t)=S*(-t),频域形式H(f)={S(f)}*,上标表示取共轭。S(f)为发射信号S(t)频域形式。匹配滤波器组匹配滤波响应信号时域及频域形式为

式中,Ah为匹配滤波器响应幅度;Rij(t)表示系统估计的目标各种运动参数下的运动方程,下标ij表示匹配滤波器标号;FT{·}表示傅里叶变换;{·}*表示取共轭。
匹配滤波后信号为

式中,S(f)为信号S(t)频域形式;IFT{·}表示傅里叶反变换。当探测区域无目标存在时,噪声经匹配滤波后不会超过检测门限,系统亦检测不到目标。当有目标存在时,目标进入波束区初期,回波时间短,匹配滤波后信号峰值低,被淹没在噪声中无法被检测。随着目标在波束中驻留时间加长,目标回波信号时间也相应延长,经匹配滤波处理后峰值越来越高,最终峰值将超过检测门限而被检测出来。根据所检测峰值,找出发生匹配的匹配滤波器,根据其参数估计目标运动参数,完成目标相参积累,实现运动目标检测与参数估计。
2 针对空间斜向匀速直线运动具体应用
2.1 应用原理
针对斜向匀速直线运动目标,如图5所示。目标进入雷达扇区时与雷达初始距离为R0,以与初始径向距离R0夹角为θ,大小为V的速度进入雷达扇区。
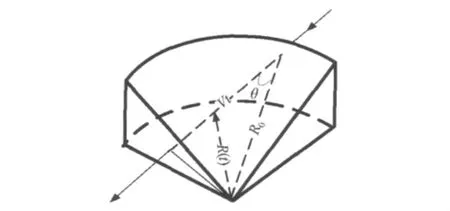
图5 斜向匀速直线运动示意图
根据余弦定理可得目标与雷达径向距离R(t)为

回波与发射信号相位差为

针对斜向匀速直线运动,按照上节所述方案结合式(8)估计目标运动方程,进而估计目标回波相位,并通过相位估计实现匹配滤波器hij(f)估计。hij(f)的估计采用搜索方式进行。通过确定R0值设定雷达探测范围,对V和θ进行二维搜索(Vi,θj),搜索范围分别为(Vmin~Vmax),(0~π),其中,Vmin,Vmax分别为现有飞行器最小与最大飞行速度。结合式(9)、式(5)及式(6)完成匹配滤波器组设计,其频域形式为

按照搜索值(Vi,θj)结合式(10)设计匹配滤波器组,通过设定门限对处理后信号进行门限检测。所有搜索情况中只有hij(f)与目标回波发生匹配,产生匹配峰值。通过门限检测确定发生匹配的匹配滤波器hij(f),通过hij(f)的参数(Vi,θj)确定目标运动速度V和目标速度方向与初始径向距离夹角θ,即(Vi,θj),以此估计目标运动状态,进而实现目标跟踪。搜索误差分析在下一节讨论。
2.2 搜索误差分析
为了保证回波信号与系统估计信号的相参性,估计相位与目标真实相位差在积累时间内需控制在一定范围,设此范围为X,一般X∈(0~π)。由此可得搜索步长。
2.2.1 速度搜索误差分析
目标以各种角度进入雷达扇区,进入角θ为0即目标作径向匀速直线运动时,速度搜索误差造成运动方程估计误差最大,进而造成相位估计误差最大。若保证此时相位误差范围在X以内,其他运动形式亦满足此条件。即 (4π)/λdVt≤X,得速度搜索步长

2.2.2 角度搜索误差分析
观察式(9)中 cosθ导数为 -sinθ,其在 θ=π/2时-sin(π/2)=-1,此时cosθ变化率最大,角度搜索误差造成的cosθ估计误差最大,系统估计误差亦最大。此时估计误差若控制在X以内,其他进入角度搜索误差亦满足此条件。
将R(t)在t=0处进行泰勒展开,由于R0≫Vt时,忽略二阶及以上高阶项影响得

设搜索角误差为dθ,满足

化简整理得

从式(11)与式(2.8)式可以看出搜索时搜索步长与信号处理时间成反比,与载波波长成正比,同时还与相参性要求严格程度X有关。可以通过降低相位估计误差限制、降低信号处理时间及提高载波波长来扩大搜索步长、降低搜索量。
3 仿真实验
针对斜向匀速直线运动进行仿真,初始条件为:初始距离为R0=300 km,目标速度V0=1000 m/s,初速与初始径向距离的夹角θ=π/3,采样率fs=30 kHz,系统信号处理时间t=12 s,载频为fc=3×108Hz,波长λ=10 m,信噪比为-40 dB。系统每个存储单元存储时间长度为2 s,共6个存储单元。系统每2 s对信号处理一次,假设目标第1 s时进入雷达波束区。目标回波与匹配滤波信号匹配时,滤波仿真图,如图6所示。

图6 滤波仿真图
由仿真图可见,目标进入雷达波束初期,回波时间短,匹配滤波后信号峰值低,被淹没在噪声中,无法检测到。随着目标在雷达波束中驻留时间延长,匹配滤波后信号峰值不断提高,最终超过门限被检测出来。
为便于研究采用全向天线,其较传统窄波束雷达,天线增益有近40 dB增益损失,因此本方法利用12 s积累时间补偿了由于全向造成的天线增益损失。如果延长积累时间可获得更高信噪比增益。同时对于分布式阵列雷达系统可通过通道间以及阵元间相参积累进一步提高信噪比增益,增强系统探测能力。系统最大处理时间是12 s,因此目标在波束中驻留12 s时匹配峰值最大。由于目标是1 s时进入波束区域,因此在12 s处理时间时即图6(f)匹配后峰值位于1 s处。随着目标在波束中驻留时间延长,超过系统信号处理时间12 s,匹配后的峰值会因为距离-多普勒耦合效应而发生移动如图6(g)~图6(j)所示。这时可根据已估计出的参数(Vi,θj),估计R0,进而估计匹配滤波器组,通过匹配滤波,实现相参积累。
4 结语
本方法不同于传统相参积累技术之处在于其将目标运动方程R(t)直接转换为回波相位φ(t),通过估计反映目标运动状态的运动方程直接估计目标回波相位,利用匹配滤波原理估计匹配滤波响应信号,通过匹配滤波实现相参积累。在估计准确的前提下估计的匹配滤波响应信号与目标回波信号具有很好的相参性,该方法具有良好的积累性能。但该方法在应用中以搜索的方式进行相位估计,使得计算量巨大;同时对于目标运动状态起伏容忍性也因载波波长的缩短而下降。同时该方法的定位以及解模糊还存在问题。其进一步应用还有待于笔者作更深入的研究。
[1]保铮,张庆文.一种新型的米波雷达——综合脉冲与孔径雷达[J].现代雷达,1995,17(1):1-13.
[2]FISHLER E,HAIMOVICH A,BLUM R,et al.MIMO Radar:An Idea Whose Time Has Come[C].Proc.2004 IEEE Int.Conf.Radar,2004.
[3]BLISS D W,FORSYTHE K W.Multiple-Input Multiple-Output(MIMO)Radar and Imaging:Degrees of Freedom and Resolution[C].Conference Record of the 37 th Asilomar Conference on Signals,Systems and Computers.2003.
[4]张顺生,曾涛.基于keystone变换的微弱目标检测[J].电子学报,2005,33(9):1675-1678.
[5]余吉,许稼,汤俊,等.基于Keystone变换的改进雷达目标长时间积累[J].雷达科学与技术,2008,6(6):454-458.
[6]李阳,龙腾.基于keystone变换的相位编码信号长时间积累方法[J].北京理工大学学报,2009,29(1):54-58.
[7]王俊,张守宏.微弱目标积累检测的包络移动补偿算法[J].电子学报,2000,28(12):56-59.
[8]陈远征,朱永锋,赵宏钟,等.基于包络插值移位补偿的高速运动目标的积累检测算法研究[J].信号处理,2004,20(4):387-390.
[9]夏卓卿,陆军,陈伟建.一种Chrip雷达包络对齐新方法[J].雷达科学与技术,2010,8(1):44-48.
[10]夏卓卿,陆军,陈伟建.脉冲多普勒雷达长时间积累技术研究[D].成都:电子科技大学,2010.
