电梯应急救援装置的柔性控制
2012-07-05肖红军李先祥肖晓
肖红军 李先祥 肖晓
(1.佛山科学技术学院 2.91630部队)
1 问题描述
随着现代化进程的推进,电梯使用越来越广泛,其安全问题也越来越受到重视,如何主动避险是电梯行业的热门研究课题。随着科技日新月异的发展,各种新材料、新工艺、新技术不断地被应用到电梯中,使电梯向着更安全、更快捷、智能化程度更高的方向发展。因电梯本身的故障导致停梯困人的情况虽然日益减少,但因其它因素导致电梯供电中断以致停梯困人的问题则日益凸现。为最大限度地减小停梯对被困乘客心理和生理上的不利影响,电梯应急救援装置应运而生。该装置能够在电梯供电中断的情况下自动投入应急救援,将电梯轿厢慢速运行到就近层停靠,打开轿门和厅门,放出受困的乘客,主动避免由于电梯供电中断故障造成乘客的人身伤害和设备的损坏。
20世纪,电梯拖动系统绝大部分使用异步电动机。21世纪,由于永磁同步电动机具有结构简单、体积小、重量轻、损耗小、出力大、效率高等特点,新增的电梯拖动系统大部分使用永磁同步电动机。因此,研制一种适合各种永磁同步电动机的电梯应急救援装置具有广泛的应用前景。对于厂家来说,该装置最好能同时兼容异步电动机拖动系统。
该装置设计难点在于存在太多不确定因素,这些不确定因素分为两类:第一类是该装置装配前不能确定,装置运行时可以确定的因素,如拖动设备可能是永磁同步电动机也可能是异步电动机,电梯用的永磁同步电动机还分凹极式和凸极式,电机功率、电机额定电压、额定电流不确定,抱闸所需时间不确定,平层时间不确定,电梯配比不确定等;第二类是装置运行时还不确定的因素,如轿厢承重不确定,以致运行方向不确定,且由于钢丝的存在,轿厢承重随着电梯上下行也会不同等。
本文根据需要提出了总体设计方案,然后重点针对两种不确定情况提出具体的解决方法,以满足不同类型的电梯拖动系统的柔性控制。
2 总体设计方案
应急救援装置包括中控板、操作盒、检测驱动板、接口板、蓄电池组及充电板,总体设计方案原理框图如图1所示。中控板是该装置的核心功能部件,实现电机控制算法、装置的逻辑控制、通信、数据存储等功能,其中虚线框内为DSP TMS320lf 2407软件实现的功能。操作盒用于参数设置、运行和显示等。检测驱动板包括电梯逻辑信号检测,电压、电流检测保护等。接口板包括控制继电器等。检测驱动板输出的信号接至IGBT功率器件,直接对蓄电池供电电压实现逆变。因此该装置控制电机在低频低压的工况下运行。
一般情况下,电梯供应商不允许应急救援装置安装位置传感器,因此无法得到位置信号,从而无法实现速度的闭环控制。而电梯只有运行在平稳的速度下才能满足轿厢乘客的舒适要求。因此,装置以采集母线电流值作为反馈信号,设计一个改进的模糊控制器,控制电压调整度,最终实现电机控制。
3 装置柔性控制设计
该装置针对两类不同的不确定因素,采用不同的解决方法,实现装置的柔性控制,以满足不同电梯应急救援的要求。
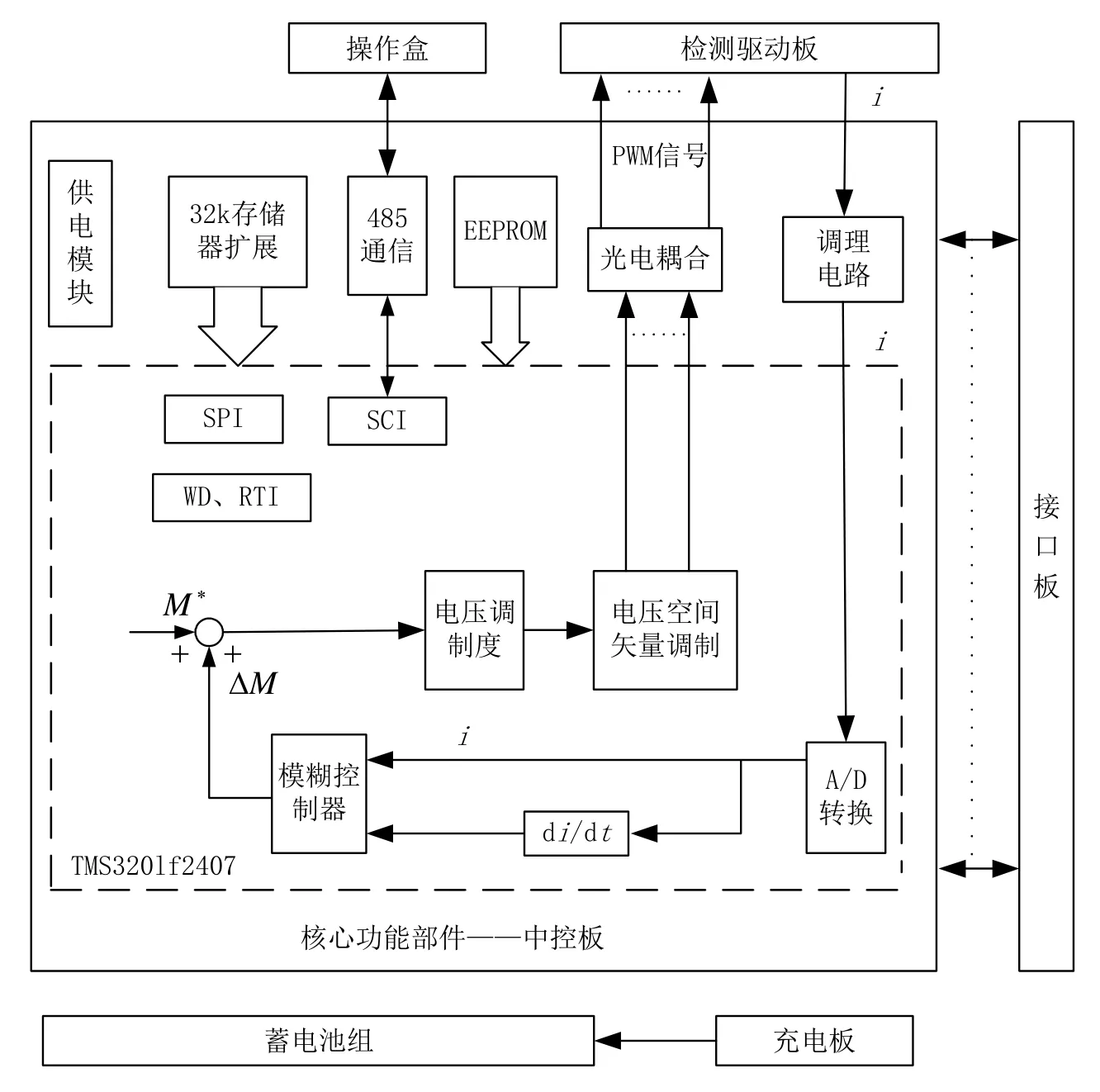
图1 应急救援装置总体设计方案原理框图
3.1 第一类不确定因素
该类不确定因素在装置安装时可以确定或者装置调试时可以得到实验值,只需通过操作盒设置参数,上传至中控板保存,下次运行时调用保存在EEPROM里面的参数即可正常运行。
3.2 第二类不确定因素
此类不确定因素是指某些运行参数随着运行状态的变化而不可预知,这里主要讨论蓄电池电量不确定和轿厢承重不确定两种因素。
蓄电池电量和外接蓄电池数量有关,这在装置安装时可以确定,属于第一类不确定因素。一般使用四个12V蓄电池,特殊情况下小功率电机的拖动系统只需三个12V蓄电池,特大功率电机则用五个或者六个12V蓄电池。但是蓄电池充电后的电量会随着使用年限增加而减少,且随着装置运行而减少。因此在安装调试时设置的参数只能作为参考值。该参数实际是控制调制电压,考虑到蓄电池电量不确定,将该参数归一化处理,即选电压调制度作为参数。从图 1虚线框内可知,模糊控制器输出是电压调制度的增量。
轿厢承重的不确定是影响装置正常运行的主要因素。它主要由以下原因造成:轿厢所载乘客数量未知,轿厢所处位置未知,启动时轿厢运行方向不确定,轿厢运行时位置变化等。轿厢承重的不确定直接导致电流不确定。因此,系统采用二维模糊控制器来实现,拖动系统控制结构图如图2 所示。
电流和电流变化率作为模糊控制器的输入,电压调制度增量作为模糊控制器的输出。给定电压调制度为装置安装时根据现场调试情况在操作盒设定的。一般情况下,该设定调制度在调试时能满足电梯轻载和重载运行要求。模糊控制器的作用是根据电流和电流变化率调整输出增量调制度,保证开机时电梯不会因为调制度过低而飞车。
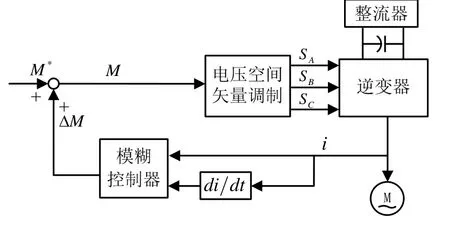
图2 拖动系统控制结构图
根据仿真和实验数据发现,若电梯正常运行,则母线电流比较平稳。因此模糊控制状态如表1。其中,电流I的基准点(即语言变量0的隶属度为1时)取值为0.9×Inom(Inom为电动机电流额定值,由操作盒设定),论域为 [ 0.6×Inom,1.2×Inom],当电流超出此范围,装置直接刹车,并放抱闸,以防电梯飞车。△I的论域由操作盒根据现场调试情况设定,同样,当△I超出设定范围,装置直接刹车,并放抱闸。

表1 模糊控制状态表
4 试验结果
现场试验拽引电机参数如下:PN=11.2kW,VN=176V,IN=43A,fN=17kW,p =20,采用四节12V、12安时的蓄电池供电。先设定操作盒的参数,如电梯运行时间、过电流保护值、欠电流保护值、低压保护值、开门延时时间等26个参数。其中包括频率f取4Hz,调制度M取0.85,电流检测延时时间取0.5s,轻载方向运行。检测单相电流波形如图3 所示。
图3 的单相电流波形表明,随着电机启动后的逐步加速,电流也会先增大后逐步减小,电机达到制定运行频率时,电流趋于稳定。
5 结论
本装置针对两类不同的不确定因素,采用不同的解决方法,实现装置的柔性控制,以满足不同电梯应急救援的要求。该装置现已成为产品,广泛安装在酒店、公寓、敬老院、住宅等电梯房。必须说明的是,该装置并不能保证适用于所有电梯应急救援,因为蓄电池电量有限,对一些特殊电梯拖动电机,即使功率不大,但其额定频率低,额定电压也低,所以采用48V电池供电,也难以实施应急救援。但该装置较以前装置拖动能力已大大增强,实施救援时轿厢更加平稳。
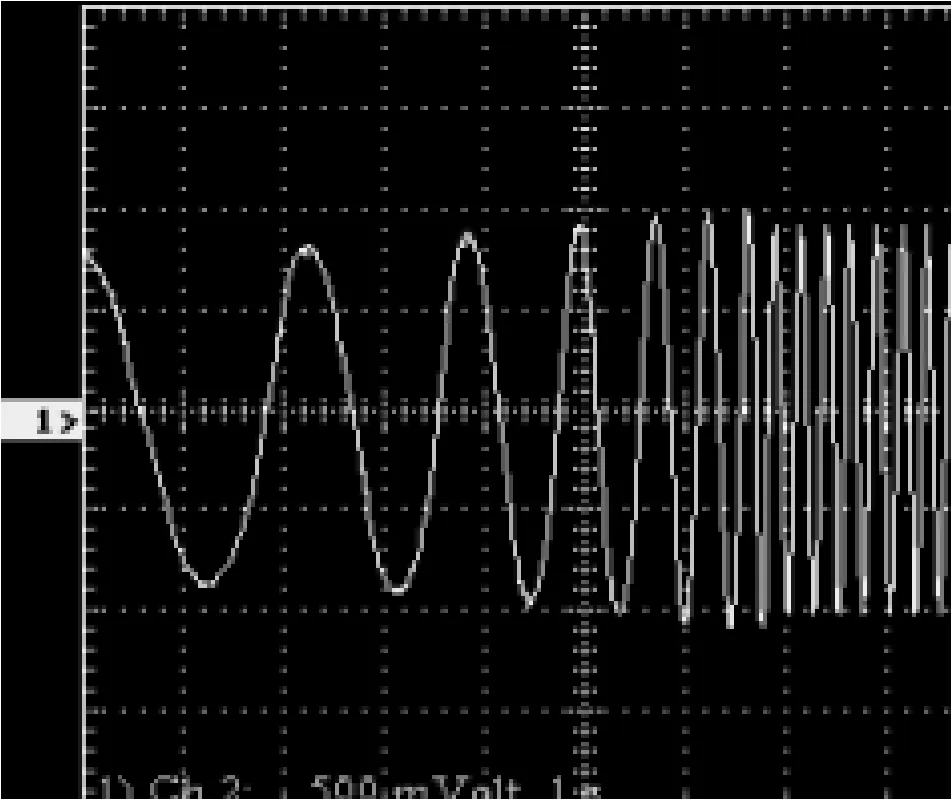
图3 单相电流波形
[1]钱亮.直接转矩控制在电梯门机控制系统中的运用研究[D].西安:西北工业大学硕士学位论文,2003.
[2]梁恩兰.嵌入式微控制器在电梯速度控制系统中的应用研究[J].安徽科技,2012(1):52-54.
[3]章卫国,杨向忠.模糊控制理论与应用[M].西安:西北工业大学出版社,1999.
[4]刘艳,尤源.基于模糊控制的IPMSM速度控制器及电流控制器设计[J].微计算机信息,2010(3-2):185-186.
