同步电机矢量控制系统的设计与开发*
2012-07-05康春生袁清珂杜湛博
康春生 袁清珂** 杜湛博
(1.广东工业大学机电学院 2.广东中能加速器科技有限公司)
1 引言
交流伺服电机正越来越多地应用于机电一体化、工业机器人、柔性制造系统等高科技领域。目前流行的交流电机控制方法主要有矢量控制技术和直接转矩控制技术。传统的伺服电机控制系统主要采用模拟器件实现,但由于模拟器件计算能力有限,很难满足现代矢量控制算法的要求。
交流电机是一个强耦合、多变量、非线性的时变系统,因此,对其进行矢量控制通常需要较大的实时计算量和较多硬件外设的支持。本系统采用 TI公司电机控制专用处理器 TMS320F2812实现电机的控制,达到控制系统硬件结构简单可靠、控制精度高、实时性强等要求[1~3]。
2 SVPWM控制策略
空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)是从电动机的角度出发,着眼于如何使电动机获得幅值恒定的圆形磁场。它以三相对称正弦波电压供电时交流电动机的理想磁链圆为基准,用逆变器的不同开关模式所产生的实际矢量来追踪基准磁链圆,由追踪的结果决定逆变器的开关模式,形成 PWM 波[4~6]。它具有易于数字化控制、直流电压利用率高、转矩脉动小等优点。SVPWM可以在TMS320F2812中通过程序计算获得,其步骤如下:① 计算电压空间矢量V*;② 判断V*所在扇区;③ 根据扇区分配矢量与作用时间;④ 装载寄存器生成PWM信号。
3 控制系统结构
根据磁场定向控制的需要,结合永磁同步电机的矢量控制算法,并考虑充分利用数字处理器 DSP芯片自身的硬件资源,本系统的大部分运算工作在软件中实现,大大简化了外围硬件电路的设计。
在系统设计中使用F2812的事件管理器(Event Manager,EV)单元产生 PWM 输出信号,通过TMS320F2812的正交编码脉冲(Quadrature Encoder Pulse,QEP)单元接收编码器的信号,通过F2812的AD单元检测电压及电流信号。根据产品系统的要求,设计了同步电动机控制系统的结构、硬件,如图1、图2 所示。
本系统的硬件电路主要由整流滤波电路模块、功率驱动电路模块、信号检测电路模块、TMS320F2812最小系统板等构成。整流滤波电路的作用是将 220V的交流转变成逆变器所需的直流母线电压;功率驱动电路的作用是利用控制回路TMS320F2812最小系统板输出的脉宽调制信号控制逆变器中功率管的开关情况,从而将输入逆变器的直流母线电压变换成三相交流电驱动电机,功率驱动电路模块主要由逆变电路、光耦隔离驱动电路和过压、过流保护电路组成;信号检测模块的作用是识别与电机转速有关的各种信号,以此作为控制回路的输入信号,并通过A/D转换将该信号转化为可供DSP实时处理的数字信号。
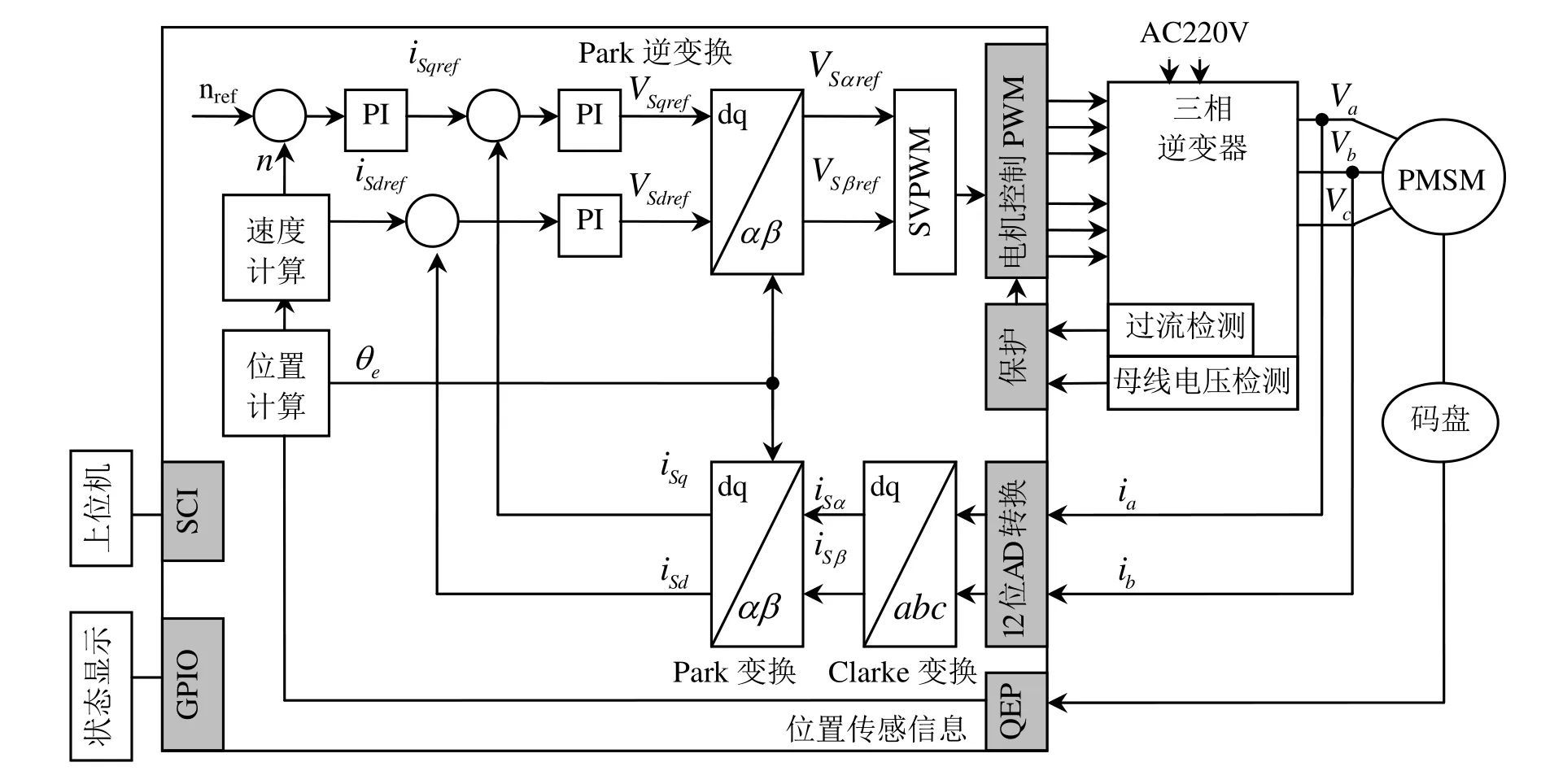
图1 永磁同步电机控制系统结构图
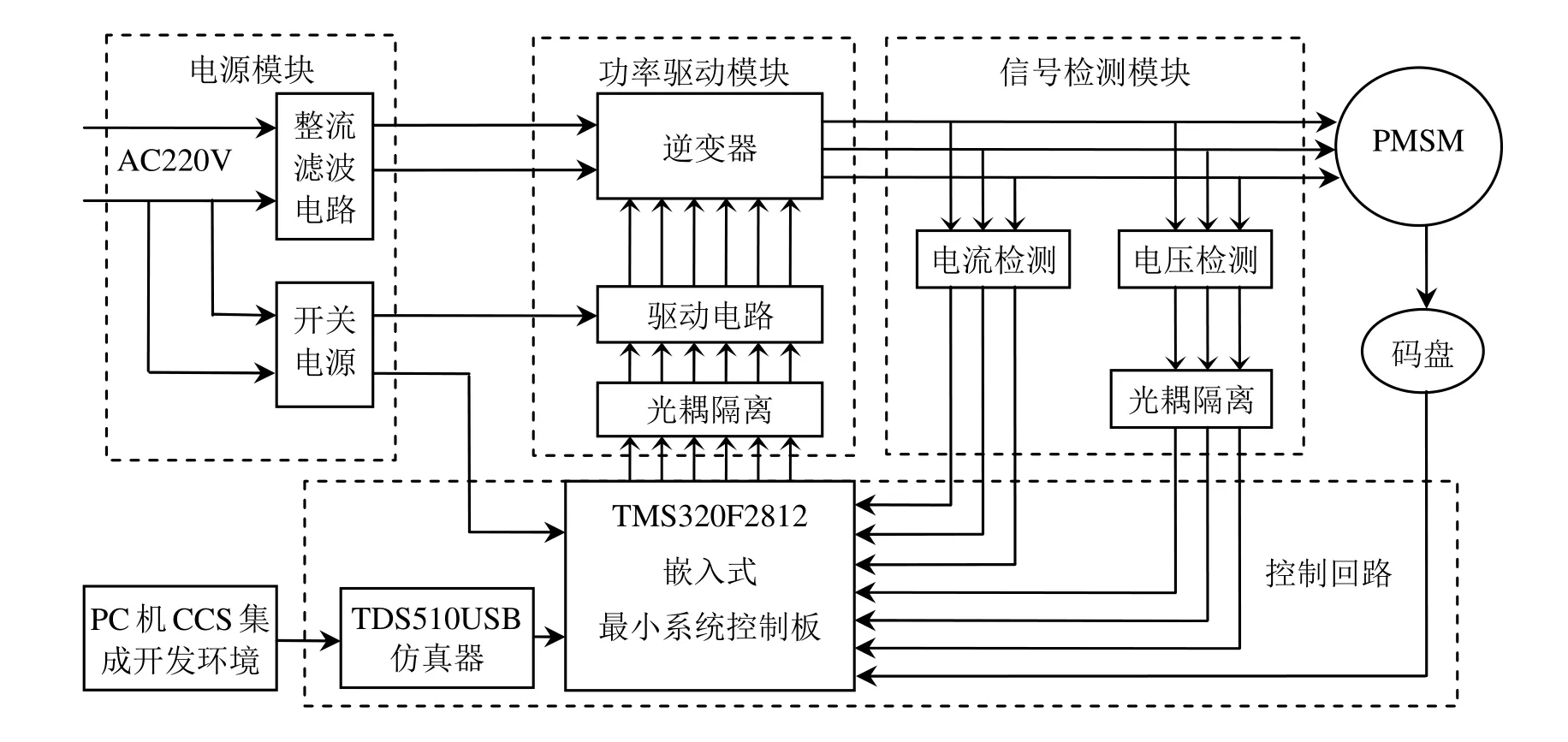
图2 控制系统硬件框图
4 软件设计与开发
本系统使用的软件平台是TI公司的集成编译环境CCS3.3,由C语言和汇编语言混合编程,并采用模块化的编程设计思想,以便管理和修改。控制系统的软件主要由三部分组成:主程序、初始化程序、中断服务程序。系统初始上电或复位后首先执行初始化程序,实现对 DSP内部各功能模块工作模式的设定和初始状态的检测,完成上述工作后系统执行主程序,当中断发生时,执行相应的中断服务子程序。
本系统应用于模拟定位机机架的旋转驱动,为满足机架每分钟一圈的转速和精确的角度定位,需实时采集机架位置及转速信息进行PID调节。转速信息通过编码器脉冲提取;位置信息通过采集精密电阻器上的电压,再经过A/D转换取得。将转速和位置信息送入双闭环PID调节器,即可使机架匀速稳定运行。
系统的主要工作都在定时器中断服务子程序中完成,其程序框图如图3 所示。
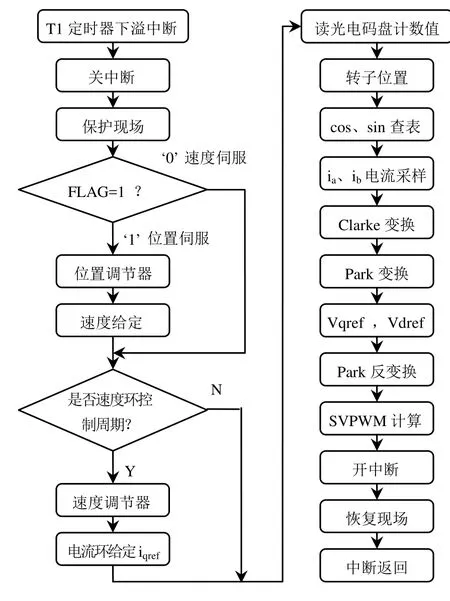
图3 定时器中断子程序
功率保护中断子程序,由DSP的PDPINTA引脚上的信号下降沿触发。根据硬件设计,功率保护中断子程序能够对主电路过流和过压、IPM过温等系统故障做出响应,可以在故障发生时关闭DSP的PWM,使控制器停机,从而避免主电路烧坏。
捕获中断子程序,用来捕获光电编码盘的 Z脉冲,电动机每旋转一圈就会有一个Z脉冲,作用是为角度计算提供基准值,为新的一周提供初始参考角度,这样可以防止A、B脉冲信号带来的累计误差。
5 结束语
本系统有以下优点:① 充分利用TMS320F2812片上的丰富外设资源和较强的数据处理能力,控制系统电路设计简单可靠,满足了永磁同步电机矢量控制的要求;② 全数字化控制策略使系统在控制精度、功能和抗干扰能力上有了很大的提高;③ 在充分利用 DSP内部资源的条件下,只须附加较少的电路元件即可实现系统预定的功能和性能,系统的软件设计合理又保证了系统的实时性和稳定性。本文的研究已应用模拟定位机,取得了良好的效果。
[1]王晓明.电动机的DSP控制——TI公司DSP应用[M].北京:北京航空航天大学出版社,2009.
[2]眭相林,许伦辉,刘风磊,等.基于 TMS320F2812的永磁同步电机位置随动系统设计[J].机械与电子,2008.7.
[3]杜春洋,王宇超.零基础学 TMS320F281x DSP C 语言开发[M].北京:机械工业出版社,2010.
[4]徐科军,陈志辉,傅大丰. TMS320F2812 DSP应用技术[M].北京:科学出版社,2010.
[5]苏奎峰,蔡昭权,吕强,等.TMS320X281x DSP应用系统设计[M].北京:北京航空航天大学出版社,2008.
[6]李广涛.基于TMS320F2812的交流感应电机无速度传感器矢量控制系统[D].南京:南京航空航天大学,2009.
