基于MTPA的永磁同步电机滑模变结构直接转矩控制
2012-07-04万健如宫成刘暐拜润卿
万健如, 宫成, 刘暐,2, 拜润卿
(1.天津大学电气与自动化工程学院,天津300072;2.河北工程技术高等专科学校,电气自动化系,河北沧州061001)
0 引言
永磁同步电机 (permanent magnet synchronous machine,PMSM)的直接转矩控制(direct torque control,DTC)是继矢量控制之后的又一高性能的控制策略。传统的DTC具有结构简单、转矩响应迅速、对转子参数不敏感等优点,引起了学者的关注,但也存在磁链低速观测困难、转矩脉动大、开关频率不固定、低速性能不佳等问题。针对上述问题,国内外学者进行了很多研究,大致集中于:转矩脉动的抑制、磁链观测器精确度的提高、无传感器运行的研究等。针对传统DTC开关频率不固定,文献[1]将空间矢量和DTC结合,采用两个PI调节器实现了感应电机固定频率的直接转矩控制(SVM-DTC)。文献[2-3]将其引入到了永磁同步电机,转矩性能得到改善,但两个PI调节器参数调节比较困难,同时增加了系统复杂性。
近年来,变结构滑模控制(variable structure sliding mode,VSS)因其所具有的优良特性而受到越来越多的重视。该方法通过滑模面的设计和等效控制律的选取,能快速响应输入的变化,在匹配条件下,由于其对参数不确定性且对外界扰动不敏感,具有很好的鲁棒性[4]。滞环控制也可以看成是一种特殊的变结构控制,因此研究变结构直接转矩控制(VSS-DTC)具有重要的意义。文献[5]首先将滑模变结构理论用于DTC中,设计了积分滑模面,通过设定积分初值保证滑模面在初始时刻为零,从而实现整个过程的鲁棒性,利用积分滑模面的平滑特性,减小了磁链和转矩的脉动,但由于设计的是全局滑模面,系统的动态性能不佳,抖振不易克服。文献[6]将指数趋近律用于VSS-DTC中,设计了线性滑模面,改善趋近运动的动态品质的同时减小了抖振。文献[7]针对[6]中指数趋近律的不足,采用一种变指数趋近律,设计了不带积分初值的积分滑模面,提高快速性的同时减弱了抖振,进一步改善了性能,但是这种变指数趋近律在离散域中仍有不足。
目前对VSS-DTC的研究大多集中在如何降低系统的抖振和提高系统鲁棒性和快速性上,并没有对实际应用的离散域进行分析,并且对磁链的控制都限定在恒磁通控制。本文在已有研究的基础上,对凸极式永磁同步电机设计了转矩的线性滑模面和积分滑模面平滑切换的组合滑模面、磁链的积分滑模面,通过分析离散域下指数趋近律的不足,设计了带内负衰减控制的指数趋近律用于转矩的滑模控制,对VSS-DTC的最大转矩电流比(MTPA)控制进行了研究,分析了电机参数变化时系统的性能,同时考虑了弱磁调速时电枢反应的影响。最后通过仿真对其进行了验证。
1 VSS-DTC工作原理
1.1 永磁同步电机数学模型
永磁同步电机d-q坐标系下的电压方程为

式中:ud、uq分别为 d、q 轴定子电压;id、iq分别为 d、q 轴定子电流;Ld、Lq、分别为 d、q 轴电感,ψf为永磁体磁链,ωe为转子电角速度,p为微分算子。
通过坐标变换,可以得到α-β两相静止坐标系中的电压方程为
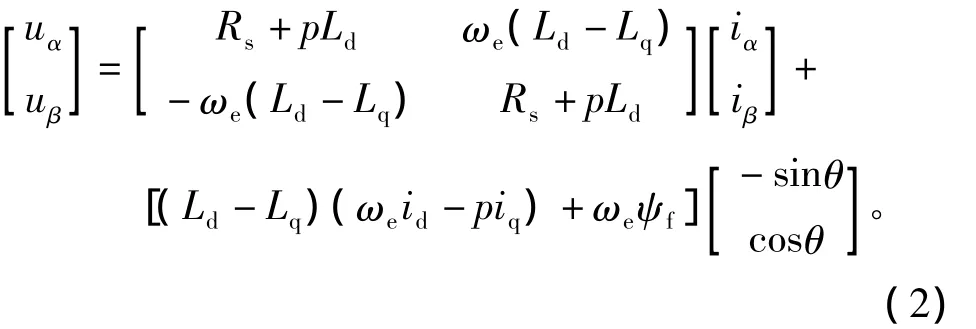
式中θ为α轴与d轴夹角,定义扩展反电势

将方程(2)表示为状态方程为
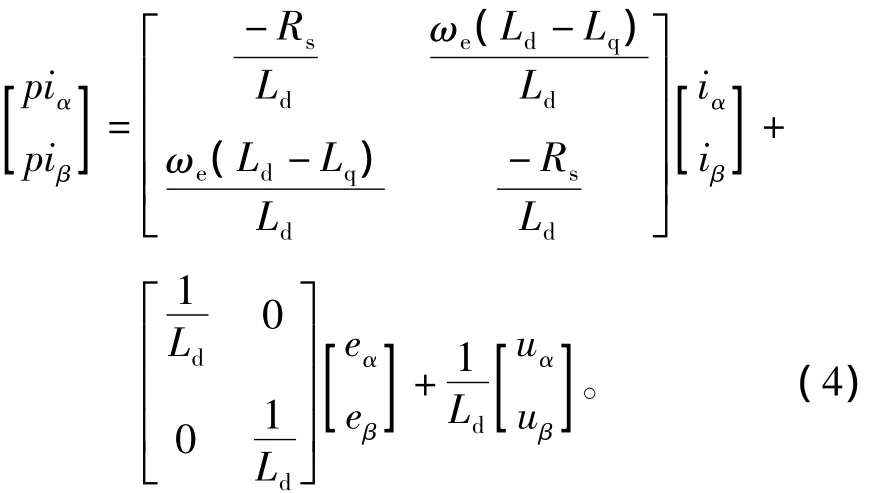
α-β坐标系下的定子磁链方程为

电磁转矩方程为

其中,P为极对数。磁链幅值的平方为

1.2 最大转矩电流比控制策略及弱磁理论
最大转矩电流比控制(maximum torque per ampere,MTPA)是在电机输出给定转矩的条件下,控制使电机定子电流最小的控制方法。扩展到弱磁控制,可以改善电机恒功率区输出转矩的性能。凸极永磁同步电机直接转矩控制的MPTA由式(8)~(12)给出,即

其中式(11)、(12)是电流、电压限幅,Ism和 Usmax分别为电机及逆变器最大允许电流和电压。
由电磁转矩给定Te,根据上式可求出MTPA运行时所需要的ψs。
文献[8]对PMSM-DTC的弱磁控制进行了详细的理论研究及实验验证,将MTPA与弱磁控制结合在一起。如图1曲线A-B-C-E-D所示,当ω=ωb时,由于采用MTPA控制,电压并未达到受限值,允许转速继续按MTPA策略继续升速,直到Us=Usmax,对于C-E-D段,输出转矩减小,对应的定子磁链减小,转速升高,维持最大端电压Usmax,当弱磁控制计算的磁链值小于MTPA的磁链给定时,进入真正意义的弱磁区。
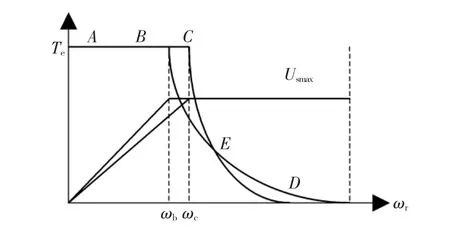
图1 PMSM的弱磁控制特性Fig.1 Control trajectories in torque-ωrplane
弱磁时磁链给定由式(13)计算,即

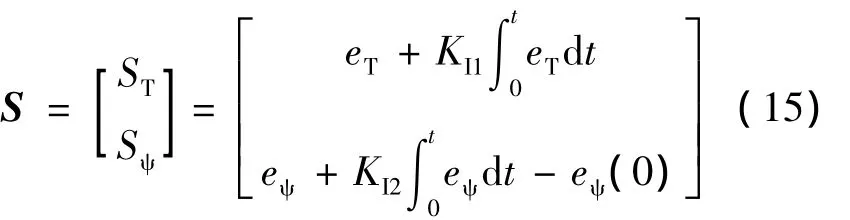
弱磁区的转矩限幅由式(14)~(15)得到,即

其中C=-Lqψf/(Ld-Lq),要保证系统稳定,应有δ< δmax,从而可求出转矩限幅 Temax。
1.3 滑模变结构的设计
滑模变结构的设计分为两个独立的部分:①滑模面的设计;②趋近律的选取。
1.3.1 滑模面的设计
滑模变结构的强鲁棒性是通过设计合适的滑模面来实现的。线性滑模面具有良好的动态性能,系统进入滑动模态后,误差逐步收敛到平衡点,但无论如何调节,误差无法在有限的时间内收敛到平衡点。积分滑模面可以保证状态量由初始时刻到最终时刻都具有强鲁棒性,滑动模态时具有较好的稳态性能,但在系统做趋近运动时,状态量变化剧烈,控制量非常大,动态特性较差。
考虑到电机的电磁惯性远比机械惯性小,对于转矩的控制,需要电机在负载变化时能够快速做出响应,在稳态时保证稳态误差,采用线性和积分的组合滑模面能够实现上述目标;MTPA输出的磁链随着转矩和转速的变化而变化,过快的响应速度会造成电流的冲击,采用积分滑模面可以使磁链平稳变化,又能保证磁链的全鲁棒性。
系统的滑模面可设计为
式中,eT=T*- T,eψ= ψ*2- ψ2,eψ(0)为磁链平方的初值,保证磁链一开始就在滑模面上;设定阈值Δ,当eT>Δ时,令KI1=0,此时转矩滑模面为线性;当eT≤Δ时,KI1设为正数,切换时不设积分初值可以保证滑模面的连续性,合理设置KI1可以保证系统具有良好的动态性能和稳态性能。
1.3.2 趋近律的设计
为减弱滑模变结构控制的抖振,高为炳院士提出了趋近律的概念,其中指数趋近律为

离散形式为

式中 ε>0,k>0,0<1-kT>1,通过合理选择参数 ε和k,既可以保证滑动模态到达的动态品质,又可以减弱抖振。但离散形式的指数趋近律的滑模运动是趋于原点的高频抖振,这个抖振可激发系统建模未考虑的高频成分,增加控制器的负担。
包括文献[7]在内的诸多改进的指数趋近律在离散域中的表达式可归结为式(16),其中F(*)是以滑模面函数或以系统状态为自变量的递减函数,随步长的增加,F(*)最终能无限趋近于零。

就削弱抖振并让系统状态最终稳定于原点来讲,上式的改进是有效的,但根据文献[10]中高为炳院士给出的准滑动模态的定义分析可知,目前对F(*)的改进不能保证滑模运动步步穿越滑模面,因此这种滑模运动不能严格地称为准滑动模态,利用这种方法设计的趋近律并不能保证滑动模态对外扰和参数摄动的不变性[9]。
考虑到离散系统的控制具有滞后性,本文设计了一种带内负衰减控制的趋近律,即

是用sigmoid函数改进的死区函数,函数曲线见图2。
‖s(k)‖较大时,为高氏指数趋近律,当‖s(k)‖→Γ时,死区的存在使控制规律为线性,能够保证系统在平衡位置附近有较好的稳态精确度,但非连续的死区函数可能会使实际的滑模运动不在预定的切换面上,而在其两侧附近产生振动,使系统存在非理想的滑模运动。用sigmoid函数改进的死区函数可以使切换开关在零附近呈现负衰减,保证步步穿越滑模面,保留了趋近阶段的快速性和准动滑模态的强鲁棒性,同时减弱了抖振。

图2 改进死区函数曲线仿真图Fig.2 Curve shape of φ[s(k)]function
1.3.3 控制策略的设计及稳定性分析
将式(15)对时间求导,得

将式(4)~(7)带入式(18),化简可得

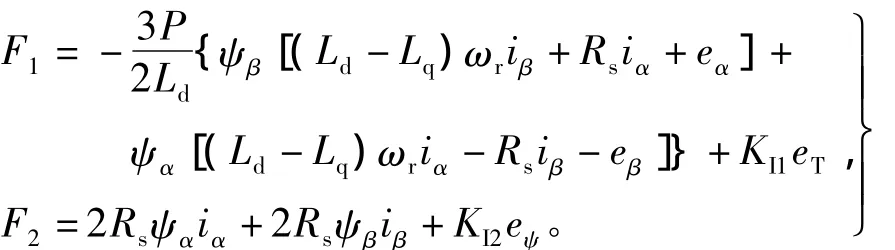
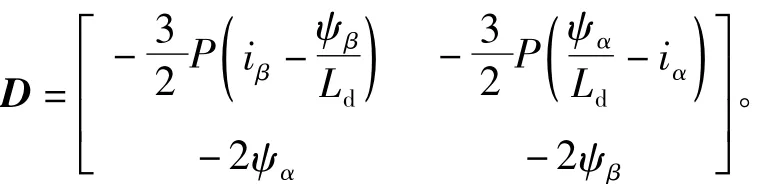
其中 U=[uαuβ]T为控制律,系数矩阵 F=[F1F2]T及 D 表达式为
选取李亚普诺夫函数V=sTs/2,对时间求导,得:V′=sT(F+DU)。对 s1,控制律取式(17);对s2,控制律取式(20)。由V′<0,选择合适的系数来保证系统滑模运动的存在性和可达性。

考虑到系统运行时的内部和外部的各种扰动及测量噪声,将式(19)重新记为:s′=F+DU+H,H=[H1H2]T为各种扰动之和,保证V′<0,可证得,当满足ε>H1,μ>|F2-H2|时,系统具有鲁棒性。
2 仿真分析
通过以上分析,在Matlab/SIMULINK中搭建如图3所示的系统仿真模型。MTPA模块由式(8)~(15)计算得到,VSS-DTC模块由式(17)、(19)、(20)得到,uα、uβ通过SVPWM模块产生PWM调制信号控制逆变桥。仿真中永磁同步电机的参数为:Rs=0.958 5 Ω,P=4,Ld=5.25 mH,Lq=12 mH,ψf=0.182 7 Wb,J=0.000 632 9 kg·m2,逆变器的开关频率设为10 kHz,nN=2 000 r/min,Usmax=185 V,Ism=20 A。仿真波形如图4~8所示。
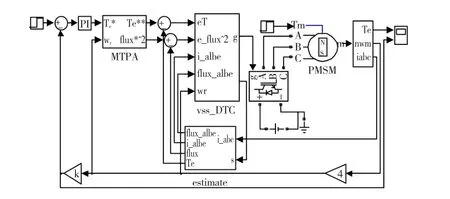
图3 VSS-DTC系统仿真模型Fig.3 Simulation model of VSS-DTC
负载连续变化时不同滑模控制下转矩波形如图4所示。通过对比可以看出,新的滑模控制方法既克服了MTPA控制下线性滑模面的稳态静差,又解决了积分滑模面动态性能不佳的问题。
考虑采样延时,稳态时,转矩采用组合滑模面、不同趋近律时的转矩滑模面滑动模态如图5所示。通过对比可以看出:稳态时,指数趋近律滑动模态能够步步穿越滑模面,具有鲁棒性,但是抖振较大;采用文献[7]的变指数趋近律,虽然明显减小了抖振,但是会出现不穿越滑模面的情况,鲁棒性降低;而本文设计的趋近律在保证滑模运动步步穿越滑模面的前提下,在一定程度上降低了抖振的幅度和频率。
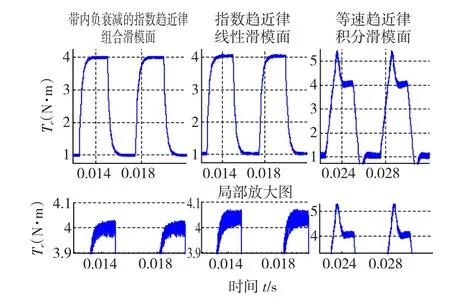
图4 负载转矩变化时转矩仿真波形图Fig.4 Waveform of torque when load changing
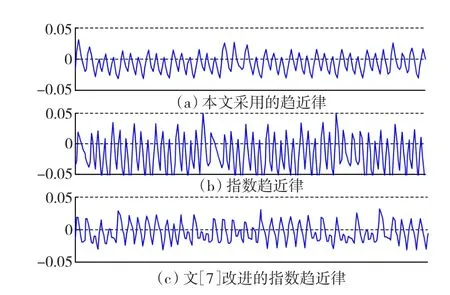
图5 不同趋近律下转矩滑动模态图Fig.5 Simulation waveform of sliding mode
图6为电机分别在理想情况和参数变化时(R′s=1.5Rs,J′=1.5J)转速和转矩波形图。由图中可知,电机参数变化时,由于磁链、转矩估算产生的误差及转速PI调节器的原因,转速会产生稍许静差(2 r/min),而由于滑模控制具有强鲁棒性,输出转矩能够快速准确的跟随负载。
为进一步验证本文方法的性能,与文献[2]设计的SVM-DTC进行对比。转速给定n=150 r/min,0.1 s突加负载,转矩响应如图7所示。

图6 转速、转矩仿真波形图Fig.6 Simulation waveform of speed,torque
从图7中的仿真结果可以看出,在理想情况下和电机参数变化时,本文的控制方法明显比采用PI调节器对转矩进行调节的SVM-DTC具有更快的转矩响应速度和更好的稳态性能。
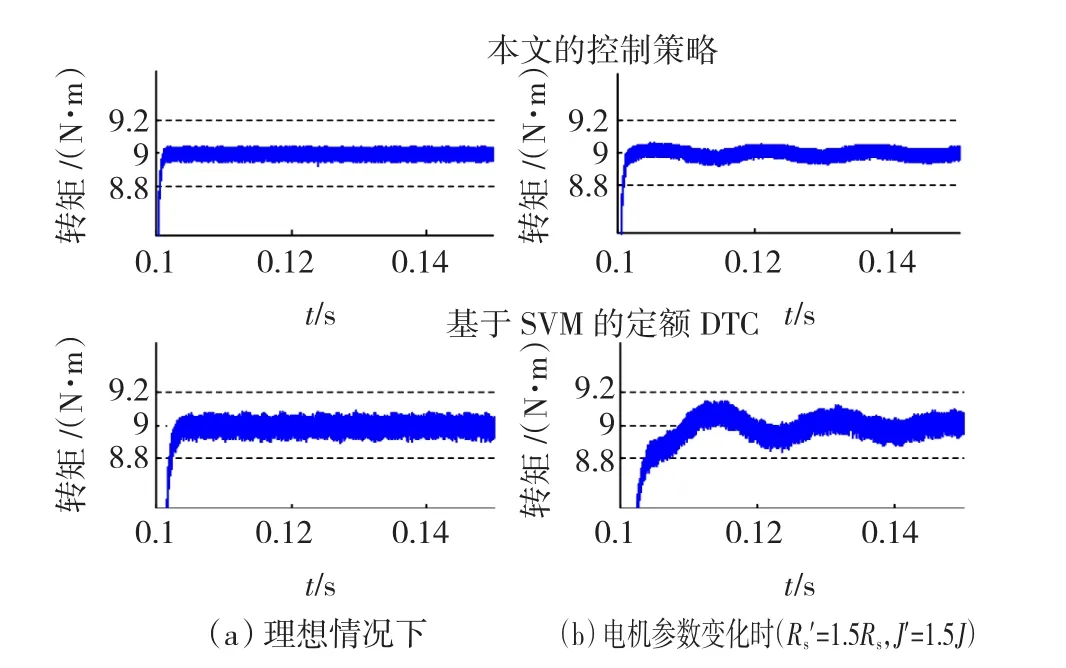
图7 转矩仿真波形图Fig.7 Simulation waveform of torque
由于PMSM的转子磁场是由永磁体建立的,不能直接弱磁,只能通过增加直轴电流利用电枢反应使电机气隙磁场减弱。在电枢反应作用下,直轴电感会显著增大。图8为弱磁时分别在理想情况下和电机直轴电感变化时(L′d=2Ld)的转矩和转速波形。t=0.15 s,转速由2 200 r/min变为2 400 r/min,t=0.3 s时,突加负载4 N·m。由图可以看出,弱磁时,当电感变化时,电机性能基本不受影响,且能长时间保持稳定。

图8 考虑电枢反应的转速、转矩仿真波形图Fig.8 Simulation waveform of speed,torque
3 结论
本文设计了一种基于MTPA的永磁同步电机滑模变结构直接转矩控制,将滑模变结构理论与直接转矩的最大转矩电流比控制相结合,并扩展到了弱磁范围。该控制方法具有开关频率固定、转矩脉动小,在全速范围内对电机参数变化均具有强鲁棒性的优点,是一种高性能的控制方式。
转矩组合滑模面的设计和平滑切换综合了两种滑模面的优势,既克服了线性滑模面的稳态静差,又解决了积分滑模面动态性能不佳的问题;设计的带内负衰减控制的趋近律在保证滑模运动步步穿越滑模面的前提下减弱了抖振。仿真结果表明,MTPA下,该控制方法比传统的VSS-DTC和SVM-DTC有更优越的动态性能和稳态性能。
[1] LAI Yen-Shin,CHEN Jian-Ho.A new approach to direct torque control of induction motor drives for constant inverter switching frequency and torque ripple reduction[J].IEEE Transactions on Energy Conversion,2001,16(3):220-227.
[2] TANG L,ZHONG L,R M F,et al.A novel direct torque control scheme for interior permanent magnet synchronous machine drive system with low ripple in torque and flux and fixed switching frequency[C]//Power Electronics Specialists Conference,June 23 -27,2002,Qld,Australia.2002:346-354
[3] 王宝仁,张承瑞,贾磊.永磁同步电机低脉动直接转矩控制建模与仿真[J].电机与控制学报,2007,11(3):221-226.
WANG Baoren,ZHANG Chengrui,JIA Lei.Modeling and simulation on a direct control algorithm with low ripple for permanent magnet synchronous motors[J].Electric Machines and Control,2007,11(3):221-226.
[4] 张细政,王耀南.基于滑模观测器的永磁同步电机变结构鲁棒控制[J].控制与决策,2009,24(1):157-160.
ZHANG Xizhi,WANG Yaonan.Robust variable structure control of PMSM based on sliding mode observer[J].Control and Decision,2009,24(1):157-160.
[5] XU Z,Rahman M F.A variable structure torque and flux controller for a DTC IPM synchronous motor drive[C]//Annual IEEE Power Electronics Specialists Conference,June 20 -25,2004,Aachen,Gemary.2004:445 -450.
[6] 贾洪平,孙丹,贺益康.基于滑模变结构的永磁同步电机直接转矩控制[J].中国电机工程学报,2006,24(20):134 -137.JIA Hongping,SUN Dan,HE Yikang.The PMSM DTC based on variable structure sliding mode[J].Proceedings of the CSEE,2006,26(20):134-137.
[7] 童克文,张兴,张昱,等.基于新型趋近律的永磁同步电动机滑模变结构控制[J].中国电机工程学报,2008,28(21):102-106.
TONG Kewen,ZHANG Xing,ZHANG Yu,et al.Sliding Mode Variable Structure Control of Permanent Magnet Synchronous Machine Based on a Novel Reaching Law[J].Proceedings of the CSEE,2008,28(21):102-106.
[8] Rahman M F,Zhong L,Lim K W.A direct torque-controlled interior permanent magnet synchronous motor drive incorporating field weakening[J].Industry Applications,IEEE Transactions on Industry Applications,1998,34(6):1246 -1253.
[9] 龚伦齐.基于改进趋近律的离散时间系统变结构控制方法研究[D].重庆:重庆大学,2010.
[10] 陈书锦,马保柱,李华德.基于MTPF永磁同步电动机直接磁链控制[J].电机与控制学报,2009,13(6):827 -833.
CHEN Shujin,MA Baozhu,LI Huade.Direct flux control of permanent magnet synchronous motors based on MTPF[J].Electric Machines and Control,2009,13(6):827 -833.
[11] 高为炳.离散时间系统的变结构控制[J].自动化学报,1995,21(2):154-161.GAO Weibing.Variable structure control of discrete systems[J].Acta Automatica Sinica,1995,21(2):154 -161.
[12] 窦汝振,温旭辉.永磁同步电动机直接转矩控制的弱磁运行分析[J].中国电机工程学报,2005,25(12):117 -121.
DOU Ruzhen,WEN Xuhui.Analysis of field weakening operation for the direct torque control of PMSM [J].Proceedings of the CSEE,2005,25(12):117-121.
[13] 唐朝晖,丁强,喻寿益,等.内埋式永磁同步电机的弱磁控制策略[J].电机与控制学报,2008,14(5):68 -72.
TANG Zhaohui,DING Qiang,YU Shouyi,et al.Research of flux weakening strategy of interior permanent magnet synchronous motor[J].Electric Machines and Control,2008,14(5):68 -72.