基于GPS的位移测量系统在填筑坝监测中的应用
2012-07-03崔弘毅编
崔弘毅编 译
(国家电力监管委员会大坝安全监察中心,浙江杭州310014)
1 概述
在填筑坝竣工以后的安全管理中,坝体位移是除渗流之外最重要的测量项目之一。通常,位移测量都采用传统的测量技术,即采用全站仪测量和水准测量。但如今,从节约劳动力、降低成本和保证非常规事件发生后测量工作的安全性等角度考虑,要求应用更快速和更成熟的测量方式。
全球定位系统(Global Positioning System,GPS)技术作为测量地表位移的手段,已应用到了多个岩土工程领域中(Kondo等,1993;Masunari等,2003)。基于GPS的位移测量系统有许多优势,它能自动、快速、连续地测量多个测点的三维位移。并且,无论天气如何,都可以使用,测点之间也不需要视线,这对传统测量技术来说则不行。基于GPS的位移测量系统已在填筑坝运行管理中验证了其可用性(Yamaguchi等,2005),目前,该技术已在日本的几座大坝上得到应用。
Majimegawa大坝(土坝)和Taiho副坝(土石坝)都引进了基于GPS的位移测量系统来测量坝体位移。表1为这两座填筑坝的数据。文章呈列了观测成果,通过与传统测量和沉降仪的位移数据结果进行比较,验证了该位移监测系统的有效性。另外,根据GPS位移数据,也将对坝体不同部位位移性态的区别进行讨论。
2 GPS位移监测系统
图1为Majimegawa大坝和Taiho副坝采用的GPS接收器和监测系统的示意图。该系统包括GPS接收器(L1波段)和控制盒。使用静态定位技术,对比其原始与固定参照点的相对位置,每小时对测点的三维坐标进行测量。

表1 Majimegawa大坝和Taiho副坝的相关数据Table 1 :Dimensions of the Majimegawa Dam and the Taiho Sub-dam
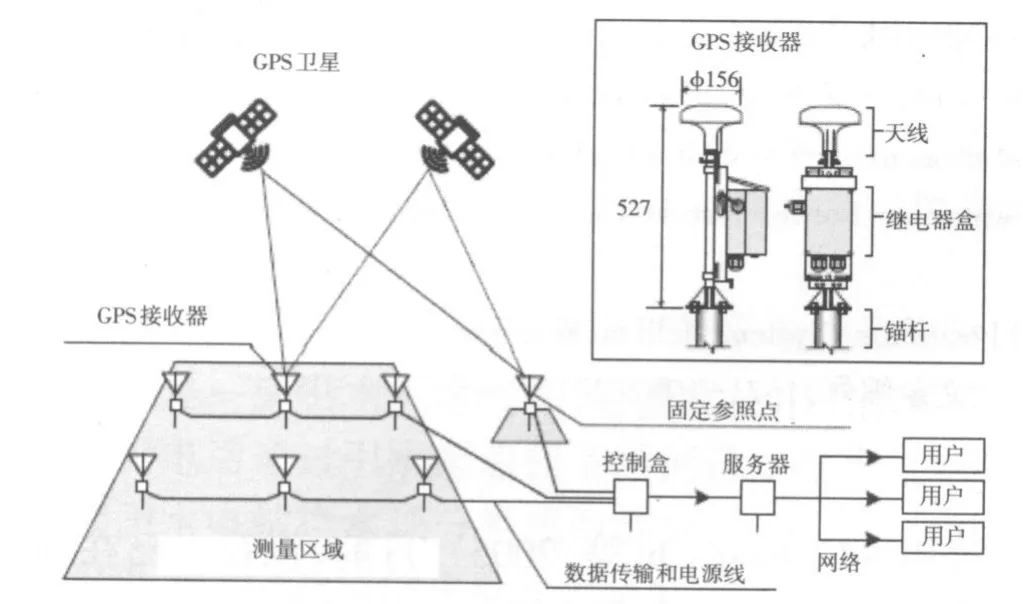
图1 GPS位移监测系统示意图Fig.1 Schematic drawing of a GPS receiver and the monitoring system
原始的GPS位移数据包含了随机噪音,其精确度由使用的卫星数量、阻碍情况、多路径效应、大气条件及其它相关因素决定。即使应用精密的静态相对定位方法,在水平方向,大致精度为5~10 mm,在垂直方向,其精度为10~20 mm,因此,需要进行统计处理来评估真实的位移情况。在本系统中,使用趋势模型。趋势模型是基于通过引进一个概率结构改进过的多项式回归模型的平滑模型的一种(Kitagawa,1993;Shimizu,1999)。
3 GPS测量在Majimegawa大坝中的应用
3.1 Majimegawa大坝概况
Majimegawa大坝是一座小土坝,坝高21.9 m,位于日本山口县的Majime河上,其平面图和剖面图见图2。基岩大部分为中度风化的花岗岩,大部分基岩透水率小于5 Lu,接近表面的局部地方为10~20 Lu。因基岩刚度和可灌性等问题,采取了以下结构处理措施(Kawasaki等,2010):
(1)考虑到基岩的低承载能力,大坝上游面采用了比通常小的坡度(30.3%);
(2)为控制渗流,没采用帷幕灌浆,而是在心墙中设置了一条沟槽;
(3)设置了垂直排水沟来降低坝体下游的浸润线;
(4)考虑到基岩的薄弱,未设置检查廊道。
关于填筑材料,心墙材料为花岗岩土壤、花岗石和粘土质片岩,土坝填筑材料为马萨砂和花岗石。
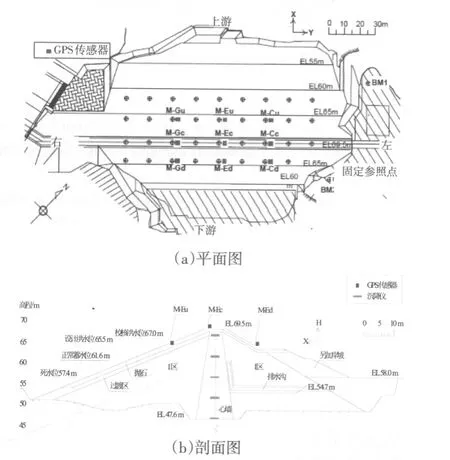
图2 Majimegawa大坝示意图和GPS接收器布置Fig.2 Schematic of the Majimegawa Dam and layout of the GPS receivers
3.2 GPS测量情况
如图2所示,在大坝表面布置9个GPS接收器作为测点,位置分别在上游面、坝顶和下游面。固定参照点M-K1布置在左岸下游面。该大坝使用GPS测量始于2007年9月,这是大坝首次蓄水的3个月后。
同时,也使用了传统的测量方式,采用的全站仪其测距精度为±(2 mm+2 ppm),测角精度为5'',自动水平精度为±1.5 mm/km。
为测量大坝心墙的压缩量,安装一个多层沉降仪,其精度为±1 mm。
3.3 测量结果和讨论
3.3.1 GPS测量的精度
图3为GPS水平位移测值和传统测量方法测值(全站仪测值)的对比。其在M-Ec点展开测量,M-Ec是布置在最大断面坝顶上的一个测点。GPS测量数值是经趋势模型平滑后的结果。从数值来看,对库水位变化的响应,GPS测量和传统测量显示出了几乎相同的趋势。但传统测量测值显示出了较大的变化,如果只看测量结果,很难清晰地看出趋势。另一方面,GPS测量则平滑地显示出了位移趋势,且对库水位变化很敏感。
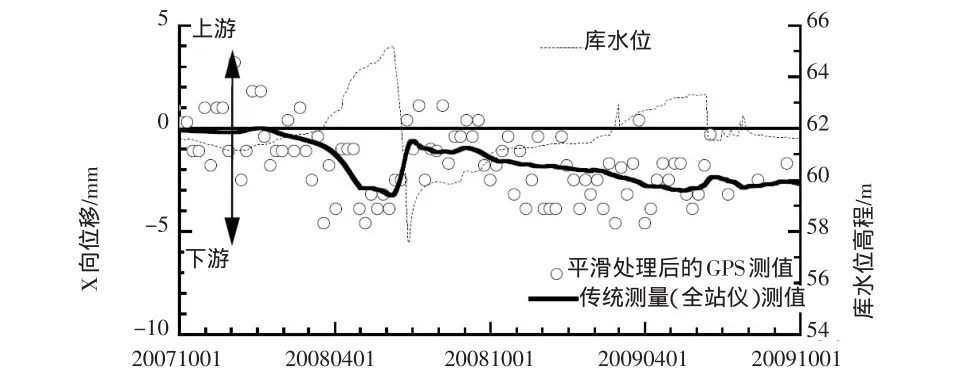
图3 Majimegawa大坝坝顶(M-Ec测点)上下游方向水平位移的GPS测值和传统测量方法测值(全站仪)Fig.3 Horizontal displacements at the crest(M-Ec)in the up-downstream direction in the Majimegawa Dam,measured with GPS and the conventional survey(total station)
图4为垂直位移GPS测值与传统测量方法(水准测量)和沉降仪测值的对比。其中,沉降仪测点HLV-5刚好安装在坝顶下。从数值看,GPS测量所得垂直位移与沉降仪的测值完全吻合。这就说明当前的GPS系统测量垂直位移可达到与沉降仪相同的精度。如上所述,如果看原始数据的话,GPS测量的垂直精度为10~20 mm,但可以通过提高测量频率和采取合理的平滑处理将精度提高到毫米级。这些数据结果证实了GPS位移监测系统测量填筑坝静态变形的有效性。
3.3.2 GPS位移的时效变化
图5显示了Majimegawa大坝GPS位移的时效变化。图5(a)为上下游方向的位移。当库水位上升时,测点移向下游,当库水位降低时,测点回到上游。这一移动主要受作用于上游面的水压力产生的水平荷载变化的影响。
图5(b)为横河向位移。从数值看,坝体在两年半时间里向左岸移动了少许。
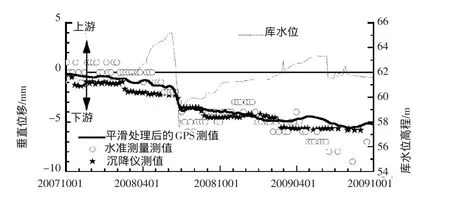
图4 Majimegawa大坝坝顶(M-Ec测点)的GPS垂直位移测值,传统测量(水准测量)和沉降仪的垂直位移测值Fig.4 Vertical displacements at the crest(M-Ec)in the Majimegawa Dam with GPS,the conventional survey(leveling),and the settlement meter
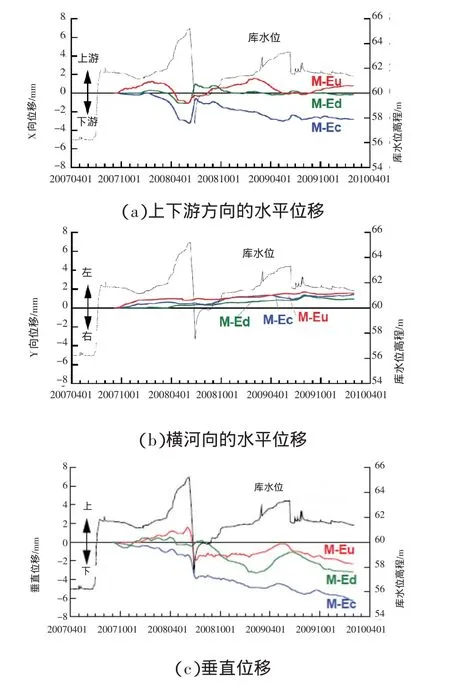
图5 Majimegawa大坝上游面(M-Eu)、坝顶(M-Ec)和下游面(M-Ed)GPS位移的时效变化Fig.5 Temporal changes in the GPS displacements at the upstream face(M-Eu),the crest(M-Ec),and the downstream face(M-Ed)of the Majimegawa Dam
图5(c)显示了垂直位移。因库水位上升和下降,上游面(M-Eu)对应地向上和向下移动,假设这一移动是因为浮力的增大和减小所致。但整个过程中,坝顶(M-Ec)向下游移动,且在2008年7月库水位快速、大幅下降时发生了特别大的沉降。M-Ec这一垂直移动似乎是由于自重固结作用和大坝心墙的持水作用。
直至现在,Majimegawa大坝的位移也不出几毫米,但就是这么小的位移,GPS测量系统还是清楚顺利地观测到了。
3.3.3 位移矢量
图6显示了2007年9月~2010年2月的位移矢量。矢量记录了库水位每米的变化。矢量的颜色,浅和深分别表示库水位的上涨和下降。从数值来看,上游面主要是垂直移动,且基本是回弹的。对坝顶,沉降是主要的,同时,因库水位变化导致的前后移动也很显著。在初次蓄水和其后的泄水过程中,下游面(M-Ed)沿边坡移动,但第一次泄水之后,矢量方向转向与边坡垂直。
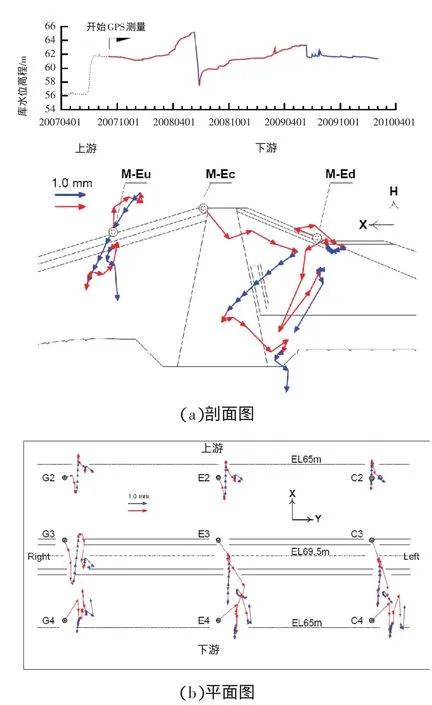
图6 Majimegawa大坝2007年9月~2010年2月的位移矢量(浅和深分别表示库水位的上涨和下降)Fig.6 Displacement vectors in the Majimegawa Dam from Sept.2007 to Feb.2010.The light and dark colours indicate the rising and drawdown of the reservoir level,respectively
根据施测至今的GPS测量,可粗略假设影响该填筑坝变形的主要因素为:(1)因库水位变化而引起的水平向力的变化;(2)因库水位变化而引起的浮力的变化;(3)自重固结作用和大坝心墙的持水作用。
4 GPS测量在Taiho副坝中的应用
4.1 Taiho副坝的概况
Taiho副坝是一座土石坝,坝高66.0 m,位于日本冲绳县的Taiho河上。大坝平面图和剖面图见图7。大坝基岩深处大部分为裂隙千枚岩,其上覆盖冲积层,厚度超过20 m,在其下游侧含有一砂砾石透水层。另外,原地下水水位高度几乎达到了坝高的一半。为解决这些地质和水文问题,设计中,为控制渗流和保证大坝稳定性,设计采取了以下措施:(1)沿坝轴线布置帷幕灌浆;(2)心墙趾下游面铺设粘土铺盖(图7(b)中的承台区);(3)在下游坝坡修建平衡坝(图7(b)中的随机区域)。因地下水水位很高,未修建检查廊道。
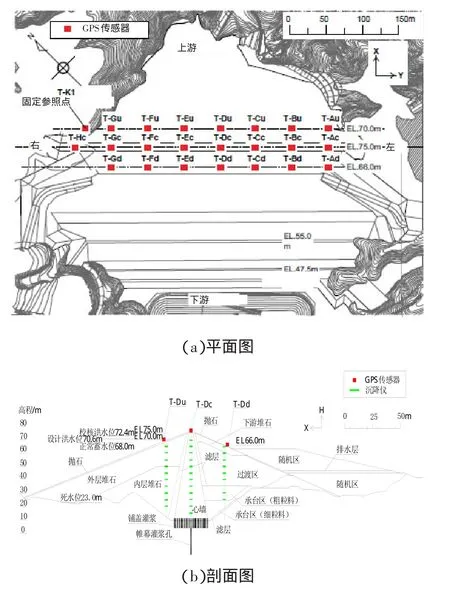
图7 Taiho副坝示意图和GPS接收器的布置Fig.7 Schematic of the Taiho Sub-dam and layout of the GPS receivers
4.2 GPS测量情况
大坝上游面、坝顶和下游面共布置了22个GPS接收器,如图7所示。固定参照点T-K1设于右边坡上游侧。
如图8(b)所示,Taiho副坝的地下GPS天线位于人孔中,该天线被用于坝顶测点的测试。利用玻璃钢盖来使无线电波衰减最小化。
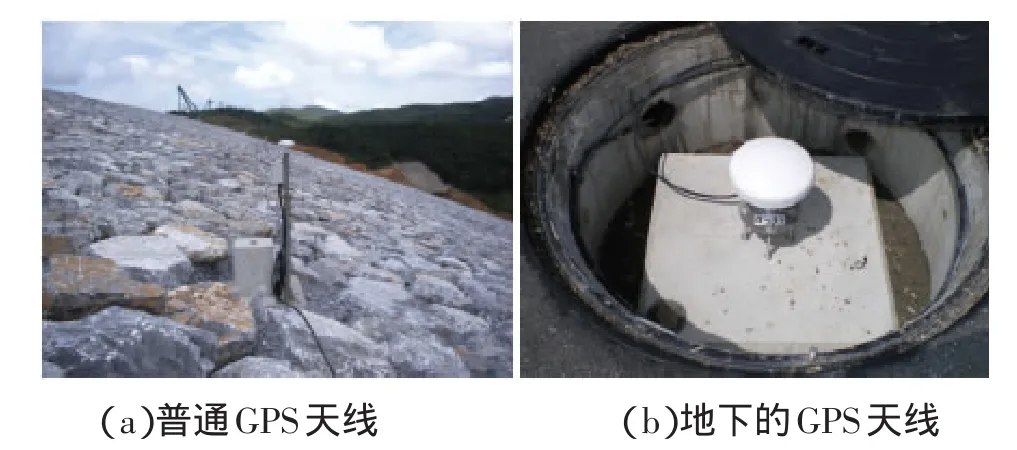
图8 Taiho副坝的GPS接收器Fig.8 GPS receivers in the Taiho Sub-dam
4.3 测量结果和讨论
4.3.1 GPS位移的时效变化
图9显示了Taiho副坝初次蓄水期间GPS位移测值的时效变化。从图9(a)可以看出,不考虑测点位置,库水位变化对上下游方向的水平位移影响很大,库水位上升时向下游位移,库水位下降时移回上游。从图9(b)可以看出,在横河向,坝体似乎稍微移向左岸,其原因是右岸地下水水位比左岸地下水水位高。
从图9(c)可以看出,在垂直方向,由于心墙固结,坝顶(T-Dc)和下游面(T-Dd)单调沉降。另一方面,响应库水位的上升和下降,上游面(T-Du)表现为上抬和沉降。这与图5(c)所示的Majimegawa大坝的位移规律相同。从图9(c)还可以看出,坝顶(T-Dc)的垂直位移显示出比其它测点更多的短波不规则性,假定其原因为人孔盖引起的无线电波衰减。
4.3.2 库水位与GPS位移间的关系
图10显示了Taiho副坝GPS位移与库水位的关系。从图10(a)可以看出,不考虑测点位置,和前文所述一样,库水位变化对上下游方向的位移影响很大。另外,在库水位上升和下降过程中,位移变化规律也和前文所述一样,说明坝体在上下游方向弹性移动。从图10可以看出,当库水位超过45 m高程时,位移对库水位变化很敏感,其原因是下游面地下水水位高程大约为45 m,假定坝体在库水位超过下游地下水水位后才会因库水位变化引起明显位移。
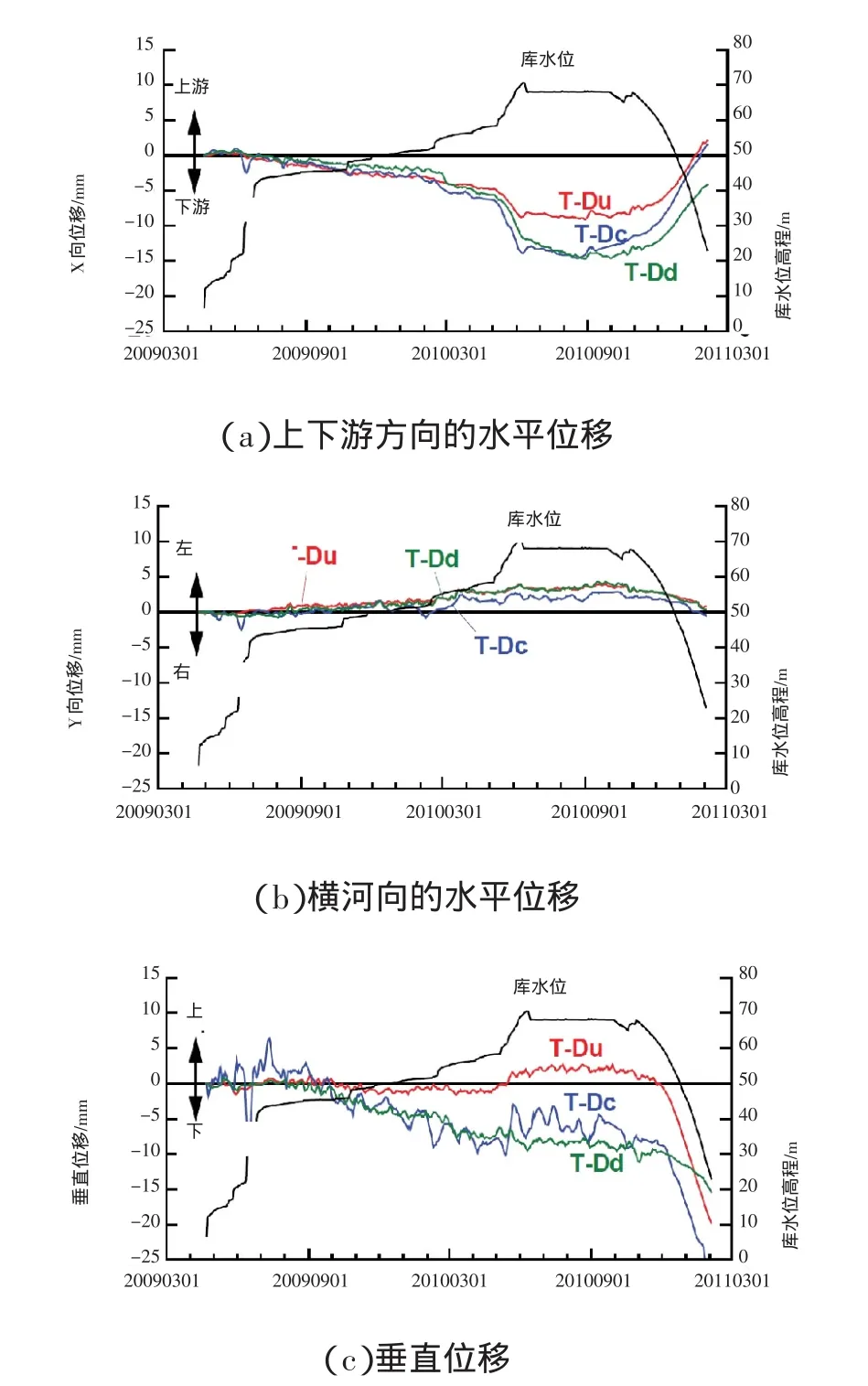
图9 Taiho副坝上游面(T-Du)、坝顶(T-Dc)和下游面(T-Dd)GPS位移的时效变化Fig.9 Temporal changes in the GPS displacements at the upstream face(T-Du),the crest(T-Dc),and the downstream face(T-Dd)of the Taiho Sub-dam
4.3.3 位移矢量
图11显示了2009年4月~2011年2月初次蓄水期间GPS测量的位移矢量。矢量记录了库水位每10 m的变化。矢量颜色浅和深分别代表库水位的上涨和下降。
在水平方向,受库水位变化影响,根据库水位的上涨和下降,所有测点都弹性地向下游和上游移动。从平面矢量场可看出,上下游方向的位移量在最大断面处(D和E断面)更大,在靠近坝肩处变小。在横河向方向,大坝在库水位上升期稍微移向左岸,但它会回弹恢复至原来的位置。
垂直方向,受心墙自重固结和因淹没而导致的沉降的影响,整个过程中,测点基本表现为下沉,但上游面的测点在库水位上升时向上移动。这样的移动同样也发生在Majimegawa大坝上,如图6所示。
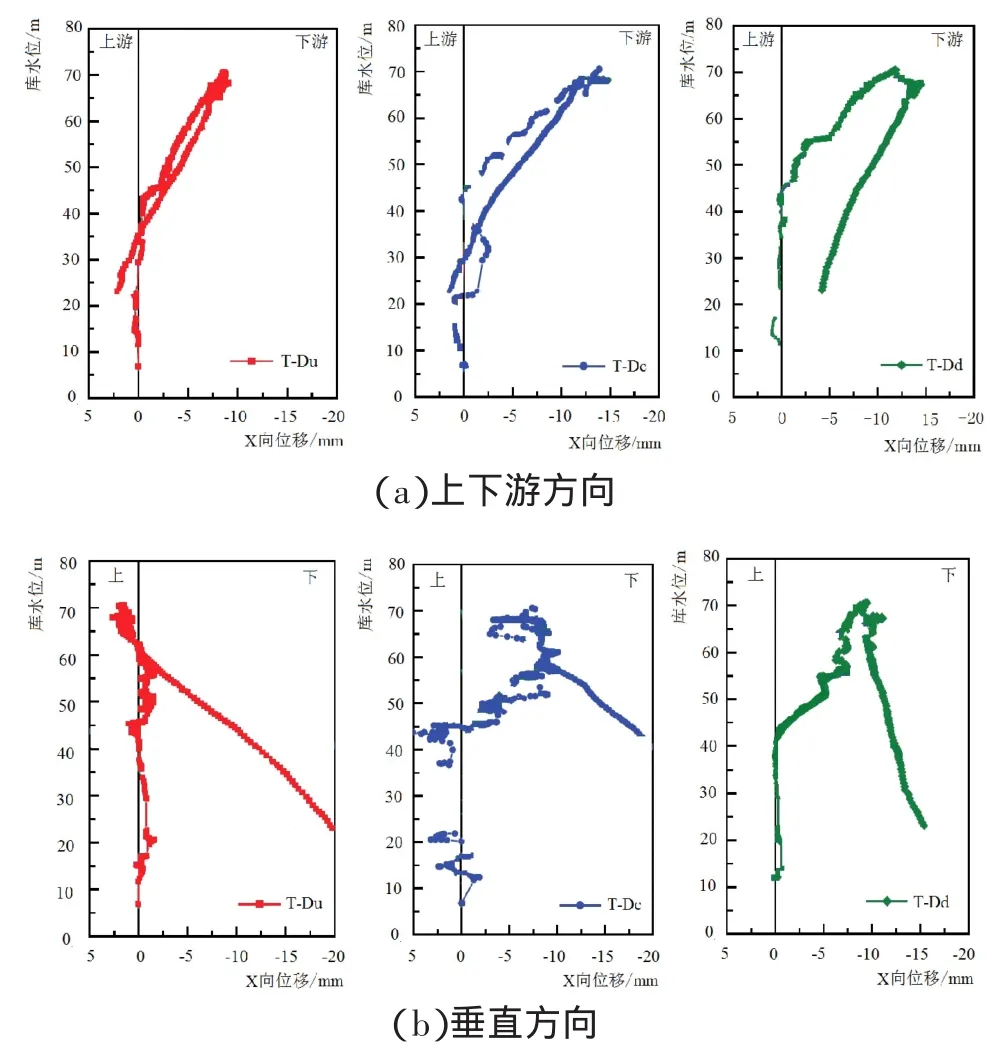
图10 Taiho副坝水平和垂直位移与库水位之间的关系Fig.10 Relationship between horizontal and vertical displacements and reservoir level in the Taiho Sub-dam
5 结语
本项研究中,两座填筑坝,即Majimegawa大坝和Taiho副坝采用了基于GPS的位移测量系统来测量其外部变形。在约两年半的观测期内,虽然Majimegawa大坝的变形仅几毫米,但基于GPS的位移测量系统仍准确而顺利地捕捉到了这些因库水位上涨和下降以及因心墙自重固结作用而产生的微小变形。传统的测量方式最多每周测量一次,若基于GPS的测量系统每小时测量一次,结合采用趋势模型合理地处理数据,则能得到比传统测量方式更可靠的数据。通过与沉降仪进行比较,结果证明GPS系统能在垂直方向取得较高的测量精度。
GPS位移监测系统的突出优点是在常规工作中可节省劳动力,在紧急情况下可实现快速测量,因为整个测量过程,从数据收集到数据处理都采用自动化。本项研究证明了GPS位移测量系统在填筑坝运行管理中的有效性。GPS监测系统不仅仅应发展成简单好用的安全监测工具,还应发展成坝体内部无损或无接触的可视化工具。
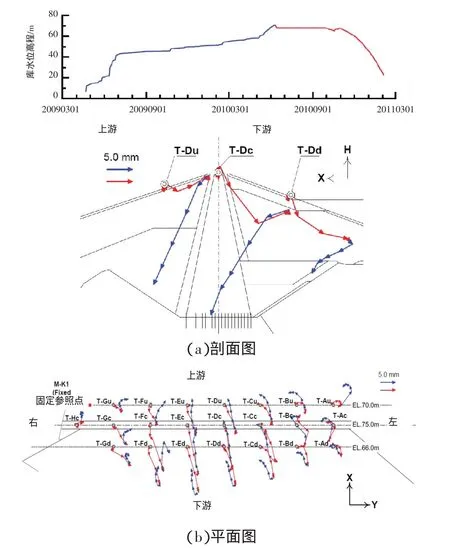
图11 Taiho副坝2009年4月~2011年2月的位移矢量图(浅和深色分别代表库水位的上涨和下降)Fig.11 Displacement vectors in the Taiho Sub-dam from April 2009 to Feb.2011.The light and dark colours indicate the rising and the drawdown of the reservoir level,respectively
[1]S.Nakashima,H.Kawasaki and N.Shimizu.Monitoring of Fill Dams Using GPS-based Displacement Measurement System[C].International Symposium on Dams For A Changing World.
