基于变时滞神经网络的直流电机PID数字调速系统仿真研究
2012-07-03齐群
齐 群
(1.华南理工大学,广州 510640;2.广东交通职业技术学院,广州 510650)
0 引言
最常用的电机调速系统是双闭环PID控制。PID控制系统因其结构简单、控制精度高而应用广泛。但是现有的PID控制系统对控制器的参数要求严格的整定,且当控制对象变化时, 其参数不能随着被控对象的变化而作相应的调整,其中电机在运行过程绕组的自感、互感、阻尼系数、转动惯量等都是随着负载情况的变化而变化的,从而造成PID控制器的使用受到一定的限制。
系统的稳定性一直是控制理论研究中的一个重要课题,依据经典的 Lyapunov理论,人们得到了许多关于系统 Lyapunov 稳定性的结论,但在通常情况下,Lyapunov稳定性刻画的是一个系统的稳态性能,不能反映其暂态性能。 而一个系统即使在全局上是稳定的,也可能在某些区间上却有非常糟糕的暂态性能。为了研究系统的暂态性能,在1961年,Peter Dorato[1]提出了短时间稳定的概念,即后来所谓的有限时间稳定的概念,引起了众多学者的关注,后来在此基础上,Amato[2]又提出了有限时间有界的概念。借助于线性矩阵不等式理论的最新成果,文献[3]改进了原有的有限时间稳定的概念,并且将研究结果推广到线性连续系统和不确定线性系统中,文献[4]又将有限时间稳定的概念推广到奇异系统,得到了更为漂亮的结果。 但是在神经网络中,尤其是在 Hopfield神经网络中对这一问题的研究不多见。
因此,在本研究中,引人具有变时滞和不确定性的非线性 Hopfield网络,通过构造适当的Lyapunov 函数,同时把一些具有模糊性的成熟经验和规则有机地融入到控制策略中,使其具有较强的鲁棒性,并且能够克服系统中的不确定因素。将变时滞神经网络和PID控制结合起来,既可以提高控制精度,又能够根据对象输出的变化调整参数,取得很好的控制效果。
1 变时滞神经网络的建立
非线性Hopfield神经网络是由n个神经元互连而成的单层反馈网络。神经元的输入和输出都为离散值1或-1,分别代表神经元的激活或抑制状态。其神经元结构图如图1所示。

图1 Hopf i eld神经元结构图
建立一系列具有参数不确定扰动项的变时滞Hopf i eld 网络:

其中,u(t)=(u1(t), u2(t),…, un(t))T为神经元状态向量, A=diog(a1,a2,…,an)为一个正定的对角矩阵, W0=(w0y)nxm,W1=(w1y)nxm分别是连接矩阵与时滞连接矩阵,这里τ(t) 为变时滞, 且0<τ(t)≤τ<1。0<τ(t) ≤τ0,其中τ, τ0为常数。W0,W1是反映系统参数不确定性的范数有界的未知矩阵, f(u(t))=(f1(u),f2(u),…,fn(u))T为有界的激活函数,J=(J1,J2,…,Jn)为外部输入常向量。
在此基础上,我们建立了基于变时滞函数的非线性Hopfield神经网络,其神经元的作用函数为符号函数,这种神经网络的各个神经元相连接,其连接强度用权值表示。mxn矩阵称为权值矩阵,每个神经元都有一个阕值θi,权值wy和阕值矢量θ=[θ1, θ2, …, θm]T定义唯一一个n维的非线性Hopf i eld神经网络。其结构如图2所示:
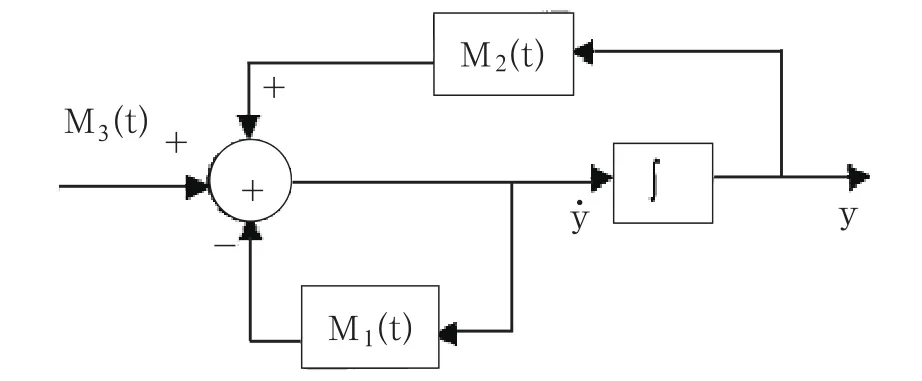
图2 基于变时滞函数的非线性Hopf i eld神经网络结构图
2 PID控制系统
传统的PID调速系统虽然具有稳定、结构简单等优点,但是当被控对象参数或者操作环境受非线性因素影响发生改变时不能随之变化,不能满足高性能、高精度的要求。本研究以永磁无刷直流电机为研究对象,其速度环采用常用的二维模糊PID控制器,电流环采用PI控制,根据系统速度误差的大小选择控制器,较大时采用模糊PID控制;而误差较小时采用PI控制,其转换可通过给定的偏差阀值e0自动控制,从而提高系统的控制性能。二维模糊PID控制器的框图如图3所示。图中,Kp为比例系数,Ki为积分系数,Kd为微分系数,e为误差,△e为误差变化,输出量u为系统控制值。

图3 模糊PID控制器
3 仿真研究
使用模糊控制器对直流电机进行仿真的仿真模型如图4所示。
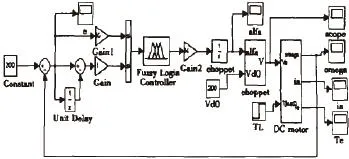
图4 直流电机调速系统模糊控制的仿真模型
仿真中直流电机调速系统的参考速度为200 rad/s,模型中Gain1,Gain,Gain2分别是偏差、偏差率及模糊控制量,其比例系数分别是:k =1/150,k1=1,k2=150×103。0.6s时,对电机突加负载为50N.m,同时对模糊控制器的输入量转速偏差e(t),直流斩波控制电路输入量alfa(t),转速omega(t)及转矩Te的仿真结果如图5所示:

图5 仿真结果
4 结论
本研究采用基于变时滞神经网络的模糊智能控制直流电机调速系统的建模及仿真。仿真结果表明基于变时滞神经网络的PID控制技术能有效抑制超调量,提高系统响应速度和稳态性能,使系统具有较强的鲁棒性。
[1] 郑大钟.线性系统理论[M].北京:清华大学出版社,1990.
[2] C.C.Tsui.A Complete Analytical Solution to the Equation TA,r=LC and It'Application.IEEE Transaction on Automatic Control,1987,32(8):742-744.
[3] 焦李成.辛申经网络系统理论[M].西安:西安电子科技大学出版社.
[4] 史荣昌.等.矩阵分析[M].北京:北京理工大学出版社,1996.
[5] 何颖,鹿蕾,赵争鸣.直流调整系统的Matlab建模与仿真[J].现代电子技术,2004,23:77-79.
